
中北大学机械与动力工程学院
实验报告
专业名称__________________________________
实验课程名称______________________________
实验项目数_______________总学时___________
班级______________________________________
学号______________________________________
姓名______________________________________
指导教师__________________________________
协助教师__________________________________
日期______________年________月______日____
实验二 二阶系统阶跃响应
一、实验目的
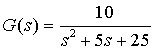
1.研究二阶系统的特征参数如阻尼比z和无阻尼自然频率wn对系统动态性能的影响;定量分析 z 和wn与最大超调量Mp、调节时间tS之间的关系。
2.进一步学习实验系统的使用方法。
3.学会根据系统阶跃响应曲线确定传递函数。
二、实验仪器
1.EL-AT-II型自动控制系统实验箱一台
2.PC计算机一台
三、实验原理
1.模拟实验的基本原理:
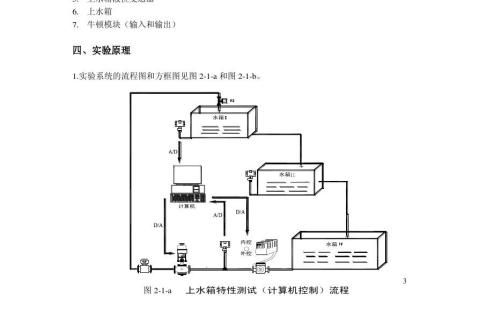
控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
…… …… 余下全文



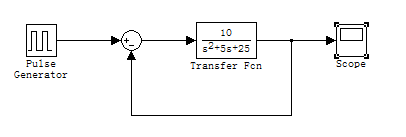
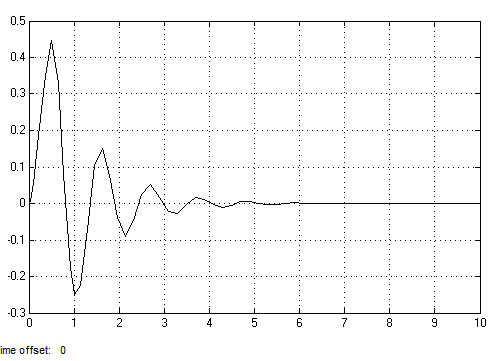
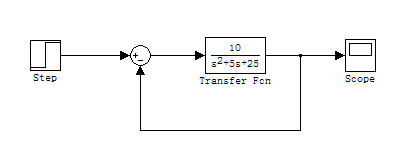
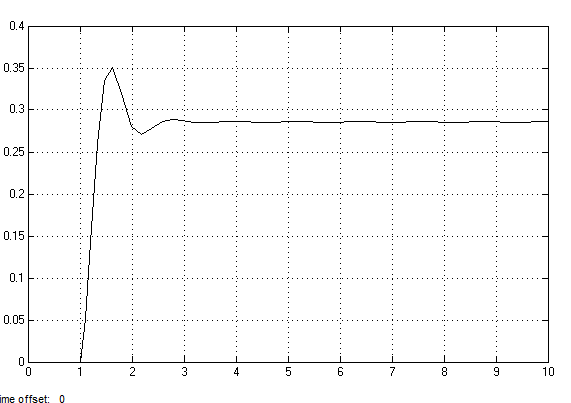
 时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。
时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。



 时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。
时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。


