硬支承动平衡实验报告
实验目的:
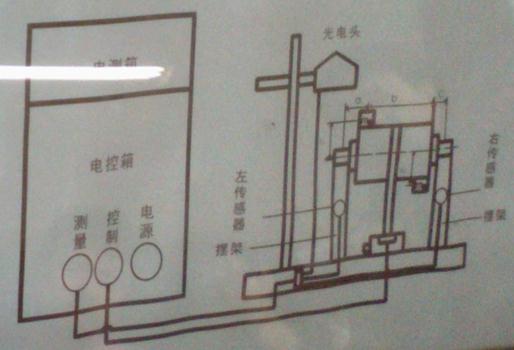
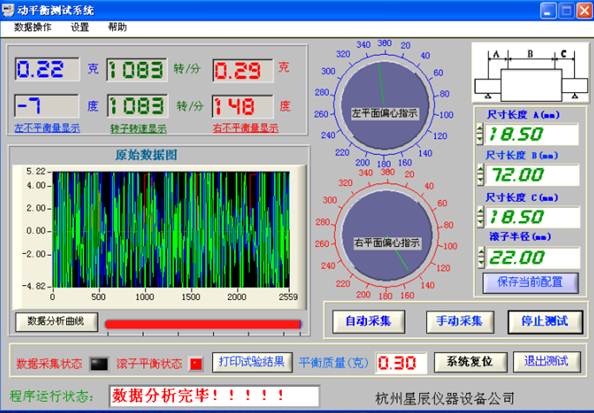
1.了解硬支承动平衡机的结构、控制面板、性能及操作方法。
2.验证、巩固和加深对基本理论的理解,培养实验动手能力。
3.掌握基本的机械实验方法、测量技能及用实验法以及培养学生踏实细致、严肃认真的科学作风。
实验设备:
1、硬支承动平衡机
2、台式钻孔机、钳工工作台
3、线切割滚丝筒
4、标定加重螺栓。
实验原理:
根据《机械原理》所述的回转体动平衡原理知:一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡重所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡重 和
和 (它们的质心位置分别为
(它们的质心位置分别为 和
和 ;半径大小可根据数值、的不同变化)所产生的离心力。动平衡的任务就是在这两个任选的平面(称ω为平衡基面)内的适当位置(
;半径大小可根据数值、的不同变化)所产生的离心力。动平衡的任务就是在这两个任选的平面(称ω为平衡基面)内的适当位置( 和
和 )加上两个适当大小的平衡重
)加上两个适当大小的平衡重 和
和 ,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即:
,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即:
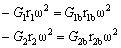
半径 越大,则所需的
越大,则所需的 就越小。
就越小。
通过平衡补偿回转体达到力和矩平衡,从而达到动平衡。
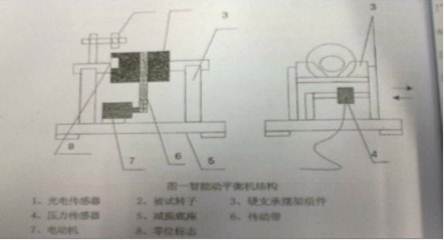
硬支承动平衡机工作原理简图如下所示:
实验步骤:
1)将两平衡平面处于原始位置,系统处于静平衡但动不平衡状态,在两支承处加润滑油。
2)按D参数键,选定转子号,回车;
3)进入D1页,输入平衡转速540转,平衡配重的半径R,回车;
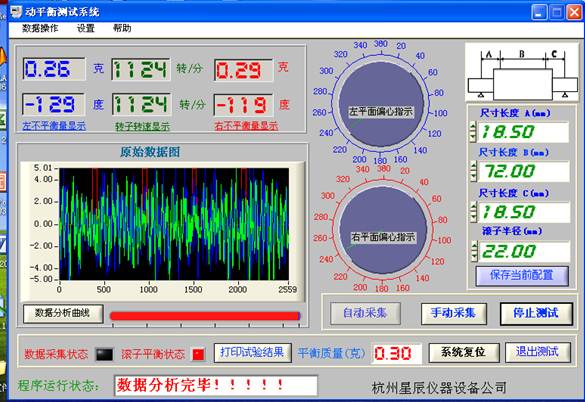
4)进入D2页,输入A,B,C参数,可测量,A为第一平衡面距第一支承中心的距离,B为两平衡面间距离,C为第二平衡面和第二支承点的距离;输入支承方式HE-1,按存储键;
…… …… 余下全文
 )和一个力偶M(等于力系对质心C 的主矩
)和一个力偶M(等于力系对质心C 的主矩 )。如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力R和力偶矩M的值均为零。这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。不平衡转子的轴与轴承之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
)。如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力R和力偶矩M的值均为零。这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。不平衡转子的轴与轴承之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
 。这时,皮带的滑差率
。这时,皮带的滑差率 。当主动轮与皮带轮直径相等时
。当主动轮与皮带轮直径相等时 。当我们让发电机负载即让灯泡消耗电能时,发电机因消耗了电能故其主轴开始变慢,而主动轮还是初始的速度运转,故皮带开始打滑。当我们的负载越大发电机主轴转速就越慢,皮带打滑就越大。皮带相对发电机作绝对打滑的过程中,因为皮带据有弹性,且主电动机是可以活动的,故皮带相对电动机皮带轮就开始弹性打滑。实事上皮带在打滑过程中始终都保持了弹性打滑,皮带在打滑的过程中,功率将在传动中损耗:功率
。当我们让发电机负载即让灯泡消耗电能时,发电机因消耗了电能故其主轴开始变慢,而主动轮还是初始的速度运转,故皮带开始打滑。当我们的负载越大发电机主轴转速就越慢,皮带打滑就越大。皮带相对发电机作绝对打滑的过程中,因为皮带据有弹性,且主电动机是可以活动的,故皮带相对电动机皮带轮就开始弹性打滑。实事上皮带在打滑过程中始终都保持了弹性打滑,皮带在打滑的过程中,功率将在传动中损耗:功率 ,故效率
,故效率 ,而
,而 (
( 为压力传感器传感力读数,
为压力传感器传感力读数, 这里等于100),
这里等于100), (
( 为压力传感器传感力读数,
为压力传感器传感力读数, 这里等于100),故效率
这里等于100),故效率 。
。