
1. 实习目的
1) 熟练掌握焊接技能、电子元器件的识别
2) 了解智能循迹小车的构成
3) 培养团队的协作和沟通能力
2. 实习要求
1) 完成基本焊接
2) 完成基本的焊接质量检测
3. 内容安排
1) 循迹模块
2) 电源模块
3) 测试模块
4) 电机驱动模块
4. 元器件的识别
4.1 直插电阻
色环标示主要应用圆柱型的电阻器上,如:碳膜电阻、金属膜电阻、金属氧化膜电阻、保险丝电阻、绕线电阻。 在早期,一般当电阻的表面不足以用数字表示法时,就会用色环标示法来表示电阻的阻值、公差、规格。 色环主要分成两部分:
第一部分:靠近电阻前端的一组是用来表示阻值。两位有效数的电阻值,用前三个色环来代表其阻值,如:39Ω,39KΩ,39MΩ。三位有效数的电阻值,用前四个色环来代表其阻值,如:69.8Ω,698Ω,69.8KΩ,一般用于精密电阻的表示。
第二部分:靠近电阻后端的一条色环用来代表公差精度。
对照表见表1:
表1 电阻色环阻值对照表

例如某4色环电阻色彩标识为:红,红,黑,棕,金,五色环电阻最后一环为误差,前三环数值乘以第四环的数量级,其电阻为 220×101=2.2K。
4.2 贴片电阻
由三位数组成ABC;计算方法:R=(A×10+B)×10C。如103代表10K。
4.3 贴片电容、直插瓷片电容
电容与电阻的计算方法相似,单位是pF,但贴片的瓷片电容上并没有数字标识,取件时要注意区分。
4.4 电解电容
如图1所示,在电解电容的表面标注有容值和耐压值,例如100uF/16V,表示其容值为100uF,耐压值为16V。

图1 电解电容的识别
4.5 贴片0805封装LED
如图2所示,LED灯有绿线或绿点的一端为负极。
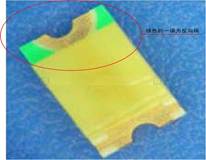
图2 贴片LED的识别
4.6 直插DO-41封装二极管
如图3示,二极管有白线条的一端为负极。

图3 直插二极管的识别
4.7 芯片
如图4所示,以MAX232为例,有小圆点的一端为芯片的正方向,引脚顺序为逆时针方向。
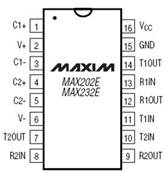
图4 芯片引脚序号
5. 各模块原理图
5.1 红外循迹模块
电路采用LTH1550-01型红外对管。当有红外光照时,接收管电阻变小,两端电压变小,LM358比较器反相输入端电压变小,比较器输出高电平,对应指示灯点亮;无红外光照时,输出低电平,对应指示灯熄灭。调节比较器同向输入端的可变电阻可以调节此红外寻迹模块的灵敏度。红外循迹模块的原理图如图5所示:
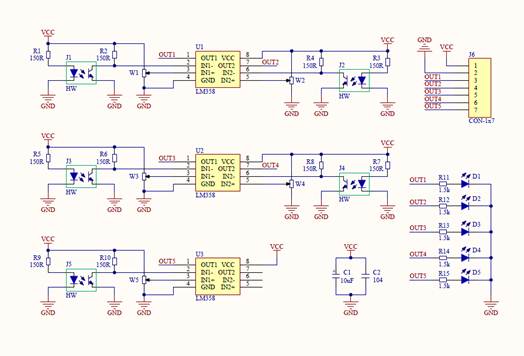
图5 红外寻迹模块原理图
5.2 电源模块
系统需要3.3V,5V,12V三种电压。其中,12V是由外部电源不经稳压直接输入得到的,主要用于电机驱动器供电。5V电压是由外部电压经开关型稳压芯片LM2596-ADJ稳压得到,用于红外模块的供电。3.3V是由5V电压经线性稳压芯片ASM117-3.3V稳压后得到,用于单片机系统。
供电电路如图6所示。调节R6、R2、R4的值,可得到不同的电压,以满足不同的供电需求。
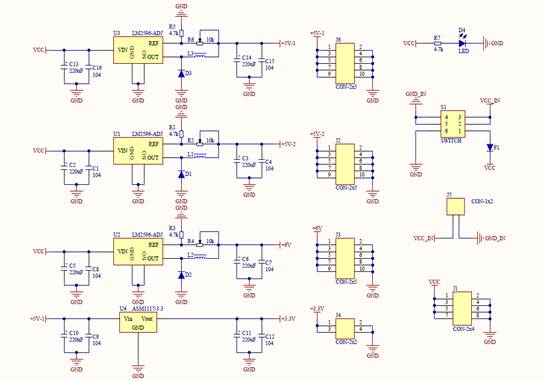
图6 供电电路原理图
5.3 电机驱动模块
采用L298N驱动芯片。电路图如图7所示:
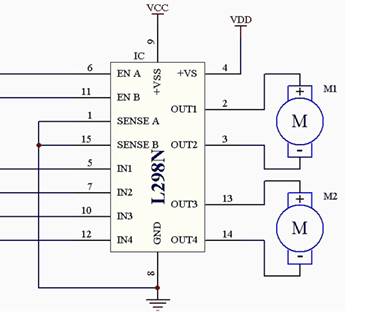
图7 电机驱动电路图
6. 焊接与检测
6.1 焊接设备
1) 电烙铁(30W)及烙铁架
2) 焊锡丝(直径0.5mm)
3) 镊子
4) 偏口钳、尖嘴钳
6.2 焊接方法
6.2.1 焊接基本操作
将电路板面向操作者倾斜搁置,烙铁头工作面靠到被焊零件引脚和焊盘上,同时将焊丝送向三者交汇处的烙铁头上,使其熔化,熔化的焊锡会马上流向并填充它们之间的空隙,使热量迅速地传导过来,很快地将被焊物升温。由于焊锡丝有焊剂芯,同时熔化的松香焊剂会流浸到焊接区各金属物的表面,起到焊剂的种种作用。随后,当温度升高到一定的程度时,扩散发生,焊锡浸润被焊物表面,开始形成焊点。然后,移动烙铁,焊点完成,撤离烙铁,冷却凝固等等,但由于焊锡丝中的焊剂量有限,如果被焊物的可焊性不是非常好,往往在焊点还没有完全形成以前焊剂早已被蒸发干净,使焊锡表面氧化变色而无法继续焊下去。为了得到新鲜的焊剂,不得不再送人一段锡丝,让焊丝中的焊剂流出来补充,而这样一来又使得焊锡液滴的总量过多而要用烙铁从焊点的下面将多余的焊锡带走抖掉。有时遇到较难焊的焊点,就必须再三送人焊丝,接着又抖掉多余的焊锡,直到真正的焊点形成。
为了提高焊锡丝的利用率、尽量缩短焊接时间,可以将开始送人的焊丝分成两部分进行:首先直接向烙铁头送一部分,用以填充间隙,加大烙铁传热的接触面,启动整个焊接过程。当被焊件热起来以后就不失时机地转到烙铁对面的一侧,直接向元器件引脚和焊盘送入另一部分焊锡丝。这样,焊锡丝就起到了引导焊点形成的作用。即可以免去烙铁两边来回移动的动作,又可以让对侧的金属及早地涂上助焊剂,避免升温引起的氧化作用。这是较熟练时的操作手法。
操作要领仍旧是:“始终带着焊剂液膜操作,让焊锡在凝固以前总是处于晶莹发亮的状态。”因为焊锡液滴变哑色就说明表面一层已经氧化,已经不是金属,在焊接温度下不会熔解,隔着这层固体杂质,金属间的浸润扩散将无法进行。
两种焊接手法的基本要求是一致的,就是要在尽量短的时间里得到,一个有着完美合金层的真焊点。实际操作时在第二种手法中往往掺和着第一种手法。
6.2.2 芯片焊接
注意,由于芯片不耐高温,故焊接时不要让烙铁接触芯片时间过长。以LM358为例:
1) 首先,熔化少量焊锡于第一脚的焊盘上;
2) 然后用镊子把芯片对准焊盘,这时候加热第一脚,固定芯片;
3) 接下来,焊接芯片对角线另一端的引脚,固定住芯片;
4) 然后分别焊牢芯片的其余引脚。
6.2.3 封装分立元件的焊接
小封装分立元件主要有电阻电容。焊接时同样不要让烙铁接触芯片时间过长。这里以焊接0805封装的电容为例:
1) 首先给要焊接元件的一个焊盘上化一点儿焊锡;
2) 然后用镊子把电容对准焊盘,加热第一脚,熔化焊盘上的焊锡,即可固定此引脚;
3) 接下来的焊接另外一个引脚。
6.2.4 插接件的焊接
插接件焊接较为简单,但须要注意两点:
1) 焊接前一定要先将器件插入PCB板合适深度,在焊接过程中要保持此位置不可变动;
2) 带有塑料的插接件,要注意焊接时间不可过长,以免损坏塑料附件。必要时在焊接过程中可做好塑料部分的散热;
3) 韩剧诶完成后要剪掉过长的引脚,引脚长度按具体器件对待,一般以2-3mm为宜。
6.3 检测质量的检测
检验焊接质量有多种方法,比较先进的方法是用仪器进行。而在通常条件下,则采用观察外观和用烙铁重焊的方法来检验。
6.3.1 外观观察检验法
一个焊点的焊接质量最主要的是要看它是否为虚焊,其次才是外观。但是,经验丰富的人完全可以凭焊点的外表来判断其内部的焊接质量。
一个良好的焊点其表面应该光洁、明亮,不得有拉尖、起皱、鼓气泡、夹渣、出现麻点等现象;其焊料到被焊金属的过渡处应呈现圆滑流畅的浸润状凹曲面。
用观察法检查焊点质量时最好使用一只3-5倍的放大镜,在放大镜下可以很清楚地观察到焊点表面焊锡与被焊物相接处的细节,而这里正是判断焊点质量的关键所在,焊料在冷却前是否曾经浸润金属表面,在放大镜下就会一目了然。
6.3.2 带松香重焊检验法
检验一个焊点虚实真假最可靠的方法就是重新焊一下,用满带松香焊剂、缺少焊锡的烙铁重新熔融焊点,从旁边或下方撤走烙铁,若有虚焊,其焊锡一定都会被强大的表面张力收走,使虚焊处暴露无余。带松香重焊是最可靠的检验方法,同时多用此法还可以积累经验,提高用观察法检查焊点的准确性。
6.3.3 其它焊接缺陷
除了虚焊以外还有一些焊接缺陷也要注意避免,引线的绝缘层剥得过长,使导线有与其它焊点相碰的危险焊接时温度太高、时间太长,使基板材料炭化、鼓泡,焊盘已经与板基剥离,元器件失去固定,与焊盘联接的电路将被撕断等。
7. 收获与体会
1) 通过实践锻炼了焊接技能;
2) 加强了动手实践能力。作为信息时代的大学生基本的动手能力是一切工作和创造的基础和必要条件。
3) 对电路原理有了一定得认识。
4) 通过焊接认识到PCB设计规范性及正确性重要地位。只有正确的PCB设计才能做出好的产品,完成系统的预期功能。
电子技术实习报告
智能循迹小车制作
 学 院:
学 院:
 专业班级:
专业班级:
学 号:
学生姓名:
指导教师:
完成时间:
成 绩:

第二篇:焊接车间实习报告
一、实习说明
(1)实习时间:20xx年x月x日至20xx年x月x日
(2)实习地点:焊接车间
(3)实习性质:培训实习报告
二、实习环境
实习期间,我在工厂的焊接车间生产部门主要了解焊接的工艺、种类及工作原理。我被安排在该部门的一个小组工作,该部门有主管1名,领班1名,QC人员2名,普工35名左右。
三、实习过程
(1)了解过程
刚进入车间的时候,车间里的一切对我来说并不陌生。对于焊接知识我也有一定的了解。车间焊接种类主要有CO2气体保护焊、Ar气保护焊和电焊。普遍用CO2气体保护焊:采用可熔化的焊丝与被焊工件之间的电弧作为热源来熔化焊丝与母材金属,并向焊接区输送保护气体(CO2气体)来保护电弧、焊丝、熔池及母材金属的一种焊接方法。
优点:1)具有成本低、搞氢气孔能力强、焊缝质量高,可进行全位置焊接。
2)与惰性气体(Ar气)保护焊相比成本低,当采用细丝焊时,电弧稳定性好,焊缝质量高。
3)与电弧焊相比:可以焊薄件,焊接速度快,生产率高,不必清焊渣,同时易于实现自动化(不必换焊条)。
应用范围:根据焊条化学成分不同,可焊接低碳钢、低合金钢、 低合金高强度钢、不锈钢等。
(2)摸索过程
在机器人焊接手车间,我了解到焊接也有不同的焊机、不同的焊接方式、焊丝的直径、采用不同的送丝速度、电流。机器人焊接最终会代替人工焊接。基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作,实际示教与再现。焊接机器人分弧焊机器人和点焊机器人两大类。弧焊机器人可以应用在所有电弧焊、切割技术及类似的工业方法中。最常用的范围是结构钢和铬镍钢的熔化极活性气体保护焊(CO2焊、MAG焊)、铝及特殊合金熔化极惰性气体保护焊(MIC焊)、铬镍钢和铝的惰性气体保护焊以及埋弧焊。
一套完整的弧焊机器人系统,应包括机器人机械手、控制系统、焊接装置、焊件夹持装置。夹持装置上有二组可以轮番进入机器人工作范围的旋转工作台。 弧焊机器人通常有五个自由度以上,具有六个自由度的弧焊机器人可以保证焊枪的任意空间轨迹和姿态。点至点方式移动速度可达60m/min以上,其轨迹重复精度可达到±0.2mm。这种弧焊机器人应具有直线的及环形内插法摆动的功能,共六种摆动方式,以满足焊接工艺要求,机器人的负荷为5kg。
在工作期间有些部件的焊接难度较大。我便向小组里的员工同事交流,向他们请教简单快速的焊接方法与技巧。运用他们介绍的操作方法技巧慢慢学着怎么焊接这有难度的部件,同时在焊接过程中熟悉和了解机械手的运作,也有利于我对焊接的了解。
四、实习期工作总结和收获
实习期间,我对车间的整个焊接流程有了一个较完整的了解和熟悉。虽然实习的工作与所学专业有所不同。但实习中,我拓宽了自己的知识面,学习了很多专业以外的知识,甚至在书本难以学到的东西。
此次实习,我学会了运用所学知识解决处理简单问题的方法与技巧,学会了与员工同事相处沟通的有效方法途径。积累了处理有关人际关系问题的经验方法。通过实习,让我在车间磨练了下自己,也锻炼了下意志力,训练了自己的动手操作能力,提升了自己的实践技能。对焊接的工作原理有深刻的了解,为以后产品的设计埋下伏笔。
导师:
制作人:赖振华 20xx年x月x日