机械原理课程设计
旋转型灌装机运动方案设计
指导教师:邢 进
小组成员:08机械本一 王杰2008090227
08机械本一 李乐2008090216
08机械本一 杜志2008090205
20##年6月1日
目 录
一. 题目
二. 设计题目及任务 …………………………………………………………………………1
2.1设计题目 …………………………………………………………………………1
2.2设计任务 …………………………………………………………………………1
三.运动方案 …………………………………………………………………………2
3.1 方案一 …………………………………………………………………………2
3.1方案二 …………………………………………………………………………2
3.3方案三 …………………………………………………………………………2
3.4 凸轮式灌装机 …………………………………………………………………………4
四. 运动循环图 …………………………………………………………………………4
五. 尺寸设计 …………………………………………………………………………4
5.1 蜗轮蜗杆设计 …………………………………………………………………………5
5.2 齿轮设计 …………………………………………………………………………5
5.3 传送带设计 …………………………………………………………………………5
5.4 曲柄滑块设计 …………………………………………………………………………5
5.5 平行四边形机构设计 …………………………………………………………………5
5.6 槽轮的设计 …………………………………………………………………………5
六. 电算法与运动曲线图 ………………………………………………………………………6
6.1 曲柄滑块机构运动曲线图…………………………………………………………………6
6..2 平行四边形机构的运动曲线图 …………………………………………………………6
七. 小结 ……………………………………………………………………………8
7.1方案简介 ……………………………………………………………………………8
7.2设计小结 ……………………………………………………………………………8
八. 参考数目 ……………………………………………………………………………8
一、题目:旋转型灌装机运动方案设计
二、设计题目及任务
2.1设计题目
设计旋转型灌装机。在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料 、酒、冷霜等),转台有多工位停歇,以实现灌装,封口等工序为保证这些工位上能够准确地灌装、封口,应有定位装置。如图1中,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。

图1 旋转型灌装机
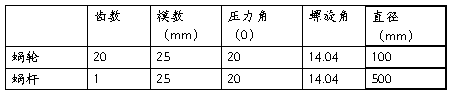
该机采用电动机驱动,传动方式为机械传动。技术参数见表1
表1 旋转型灌装机技术参数

2.2设计任务
1.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
2.设计传动系统并确定其传动比分配。
3.图纸上画出旋转型灌装机地运动方案简图,并用运动循环图分配各机构运动节拍。
4.电算法对连杆机构进行速度、加速度分析,绘出运动曲线图。用图解法或解析法设计连杆机构。
5.凸轮的设计计算。按凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。对盘状凸轮要用电算法计算出理论廓线、实际廓线值。画出从动件运动规律线图及凸轮廓线图
6.齿轮机构的设计计算。
7.编写设计计算说明书。
8.完成计算机动态演示。
2.3 设计提示
1.采用灌装泵灌装流体,泵固定在某工位的上方。
2.采用软木塞或金属冠盖封口,它们可以由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在瓶口)。设计者只需设计作直线往复运动的压盖机构。压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3.此外,需要设计间歇传动机构,以实现工作转台的间歇传动。为保证停歇可靠,还应有定位(缩紧)机构。间歇机构可采用槽轮机构、不完全齿轮机构等。定位缩紧机构可采用凸轮机构等。
三、运动方案
3.1 方案一:(机构简图见附图)
用定轴轮系减速,由不完全齿轮实现转台的间歇性转动。此方案的优点是,标准直齿轮与不完全齿轮均便于加工。缺点:一方面,传动比过大,用定轴轮系传动时,占用的空间过大,使整个机构显得臃肿,且圆锥齿轮加工较困难;另一方面,不完全齿轮会产生较大冲击,同时只能实现间歇性转动而不能实现自我定位。
3.2 方案二:


灌装与压盖部分采用如图所示的等宽凸轮,输送部分采用如图所示的步进式传输机构。缺点:等宽凸轮处会因摩擦而磨损,从而影响精确度;步进式传输机构在输出瓶子的时候,需要一运动精度高的拨杆。
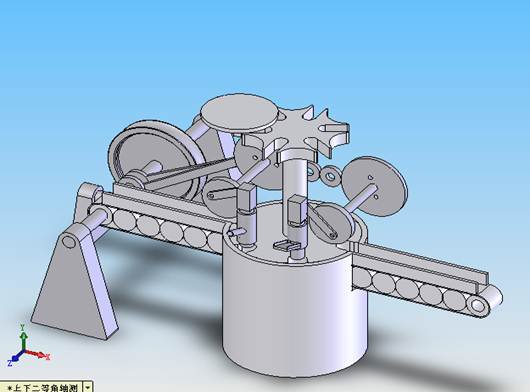
3.3 方案三:
1. 如图所示,由发动机带动,经蜗杆涡轮减速;通过穿过机架的输送带输入输出瓶子;
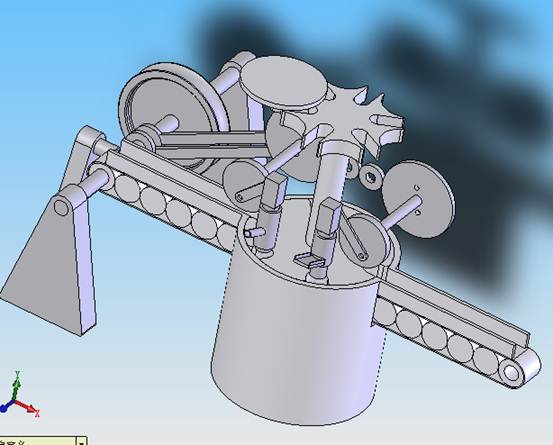
由槽轮机构实现间歇性转动与定位;压盖灌装机构采用同步的偏置曲柄滑块机构,另外,
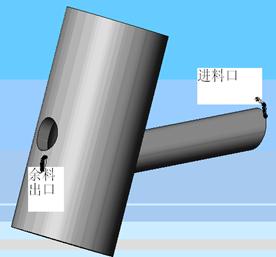

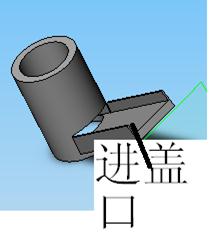
在压盖灌装机构中,分别设置了进料口、进盖口以及余料的出口,如上图所示。
此方案为我们最终所选择的方案。
2. 优缺点分析。
优点:蜗轮蜗杆传动平衡,传动比大,使结构紧凑;传送带靠摩擦力工作,传动平稳,能缓冲吸震,噪声小;槽轮机构能实现间歇性转动且能较好地定位,便于灌装、压盖的进行。
缺点:在平行四边行机构中会出现死点,在机构惯性不大时会影响运动的进行;由于机构尺寸的限制,槽轮需用另外的电动机来带动。
3.4 凸轮式灌装机
在设计过程中,曾考虑过用下图的凸轮机构作为压盖灌装机构,从而六个工位连续工作,以提高效率,但考虑到输送装置等各方面原因后,放弃了此方案。

四、运动循环图
以曲柄滑块机构的曲柄转过的角度为参考(与槽轮的导轮转过的角度相同)
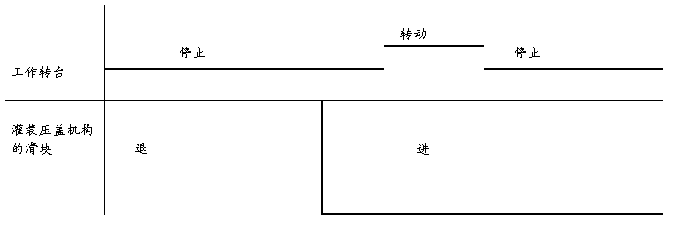
0 60 120 150 180 240 300 360
五、尺寸设计
5.1 蜗轮蜗杆设计:
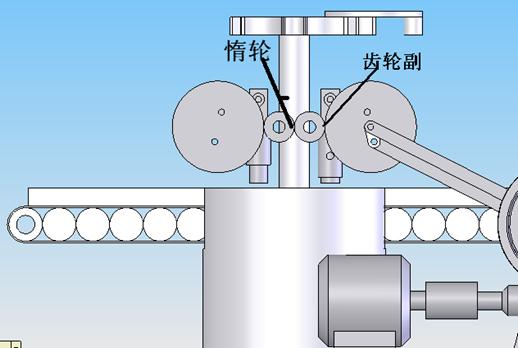
5.2 齿轮设计(下图所示的惰轮以及与其啮合的一对齿轮)——采用标准齿轮

5.3 传送带的设计
速度:V=wr=72r/min*50mm
每两个瓶子之间的距离S: t=S/v=1/(w1/6 ) 其中 w1为转台的角速度 12r/min
解得:S=50mm
5.4 曲柄滑块机构的计算
由机构整体尺寸,行程为137mmm ,行程速比系数K=1.4 偏心距为50mmm 具体设计过程见图解法
5.5 平行四边形机构的设计
由于已知曲柄长度为50mm,连架杆长度为706.61mm,由平行四边形定理可得出该机构的尺寸。
5.6 槽轮的设计
L=450mm Ψ=30 ∴ R=LsinΨ =225 mm s=LcosΨ=389 mm
h≥s-(L-R-r)=130mm d1≤2(L-s)=60mm d2﹤2(L-R-r)=100mm
其中 L为中心距 圆销半径r=30mm d1为拨盘轴的直径 d2为槽轮轴的直径
六、电算法与运动曲线图
6.1 曲柄滑块机构运动曲线图
滑块的位移分析
滑块的速度分析
滑块的加速度分析
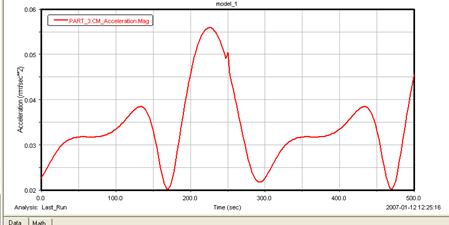
由上述运动曲线图知:该机构具有急回特性,由加速度曲线知,该机构冲击较小。
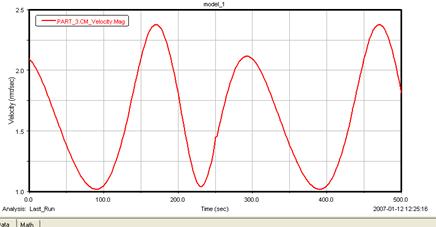
6.2 平行四边形机构的运动曲线图
对A点进行位移、速度、加速度分析:

A点的加速度曲线

位移曲线

速度曲线

由上述曲线可以看出,平行四边形机构在运动过程中,为匀速运动,加速度会发生突变,因而存在着冲击。
七、小结
7.1方案简介
在整个系统运用到了蜗杆蜗轮机构,槽轮机构,偏置曲柄滑块机构等常用机构。完成了从瓶子的传输到灌装,压盖,最后输出的机器。
旋转型灌装机,是同时要求有圆盘的转动,曲柄滑块机构的运动和传送带的传送的机构。
圆盘间歇转动部分:因为在系统的原始要求中需要有间歇转动的特性,而工位为6个,所以在其中首先引入了可以实现间歇转动的典型机构——槽轮机构。且槽轮机构的转动速度是圆盘转速的6倍,并且在转动时分别在6个工位进行停歇。
灌装封口急回部分:灌装和风口虽然为两个工位,但其的运动特性是一样的,只是有一个时间的差值而已。而我们学过的有急回特性的最典型且简单的机构就是偏置曲柄滑块机构。因为圆盘的转动为12r/min,而每一转有6个瓶子需要进行灌装和封口的工序,所以需要曲柄的转速也为72r/min。所以曲柄与发动机的传动比就为20:1,所以其前面的轮系传动只需要完成传动从1440r/min到72r/min的变化,所以,在这之后用了蜗杆蜗轮机构将其传动比直接变为20:1。但由于在这两个位置的方向问题,两个偏置曲柄滑块为反方向的运动。因为这样,又在两个曲柄之间添加了两对小的齿轮副,以实现其方向的转换。
7.2设计小结
在真正开始设计这个机构之前,我们曾经有过很多想法,有些很幼稚,甚至不能算是机械专业的学生设计的方案,有些又过于复杂,只能想出来,却很难实现。这次课程设计,是我们第一次将本学期《机械原理》这门课程中所学的知识综合运用到实际中,另外对于机械设计也有了初步的认识。这次课程设计,我们用了一个多月的时间,从最初的毫无头绪到逐渐做出雏形,然后进一步改进。在这整个过程中,我们在实践中摸索成长,同时也更加清晰地认识到只有认真地掌握好理论知识,在实际应用才能够得心应手。
八、参考资料
1.《机械原理》(第六版) 孙桓 陈作模 主编 高等教育出版社
2.《机械设计课程设计》(第二版)朱文坚 黄平 编 华南理工大学出版社
3.《机械设计基础课程设计》 孙德志 张伟华 邓子龙 编 科学出版社
4.《机械设计与理论》 李柱国 主编 科学出版社
5.《机械设计课程设计》 朱家诚 主编 合肥工业大学出版社
设计题目:
1. 活塞式压气机机构设计
2. 简易牛头刨床机构设计
3. 压床机构设计
4. 铰链式额式破碎机机构设计
5. 搅拌机机构设计
6. 坯料输送机机构设计
7. 简易插床机构设计
8. 步进输送机机构设计
9. 压片机机构设计
10. 专用镗床机构设计
11. 渐开线齿轮仿形铣削夹具机构设计
12. 平衡吊机构设计
第二篇:机械原理课程设计zdp
机械原理课程设计
任务书
题目:连杆机构设计B4-b
姓名:
班级:机械设计制造及其自动化20##级7班
设计参数
设计要求:
1.用解析法按计算间隔进行设计计算;
2.绘制3号图纸1张,包括:
(1)机构运动简图;
(2)期望函数与机构实现函数在计算点处的对比表;
(3)根据对比表绘制期望函数与机构实现函数的位移对比图;
3.设计说明书一份;
4.要求设计步骤清楚,计算准确。说明书规范。作图要符合国家标。按时独立完成任务。
目录
第1节 平面四杆机构设计... 3
1.1连杆机构设计的基本问题... 3
1.2作图法设计四杆机构... 3
1.3 解析法设计四杆机构... 3
第2节 设计介绍... 5
2.1按预定的两连架杆对应位置设计原理... 5
2.2 按期望函数设计... 6
第3节 连杆机构设计... 8
3.1连杆机构设计... 8
3.2变量和函数与转角之间的比例尺... 8
3.3确定结点值... 8
3.4 确定初始角 、
、 ... 9
... 9
3.5 杆长比m,n,l的确定... 13
3.6 检查偏差值 .... 13
.... 13
3.7 杆长的确定... 13
3.8 连架杆在各位置的再现函数和期望函数最小差值的确定... 15
总结... 18
参考文献... 19
附录... 20
第1节 平面四杆机构设计
1.1连杆机构设计的基本问题
连杆机构设计的基本问题是根据给定的要求选定机构的型式,确定各构件的尺寸,同时还要满足结构条件(如要求存在曲柄、杆长比恰当等)、动力条件(如适当的传动角等)和运动连续条件等。
根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三类问题:
(1)预定的连杆位置要求;
(2)满足预定的运动规律要求;
(3)满足预定的轨迹要求;
连杆设计的方法有:解析法、作图法和实验法。
1.2作图法设计四杆机构
对于四杆机构来说,当其铰链中心位置确定后,各杆的长度
也就确定了。用作图法进行设计,就是利用各铰链之间相对运动
的几何关系,通过作图确定各铰链的位置,从而定出各杆的长度。
根据设计要求的不同分为四种情况 :
(1) 按连杆预定的位置设计四杆机构
(2) 按两连架杆预定的对应角位移设计四杆机构
(3) 按预定的轨迹设计四杆机构
(4) 按给定的急回要求设计四杆机构
1.3 解析法设计四杆机构
在用解析法设计四杆机构时,首先需建立包含机构各尺度参数和运动变量在内的解析式,然后根据已知的运动变量求机构的尺度参数。现有三种不同的设计要求,分别是:
(1) 按连杆预定的连杆位置设计四杆机构
(2) 按预定的运动轨迹设计四杆机构
(3) 按预定的运动规律设计四杆机构
1) 按预定的两连架杆对应位置设计
2) 按期望函数设计
本次连杆机构设计采用解析法设计四杆机构中的按期望函数设计。下面在第2节将对期望函数设计四杆机构的原理进行详细的阐述。
第2节 设计介绍
2.1按预定的两连架杆对应位置设计原理
如下图所示:
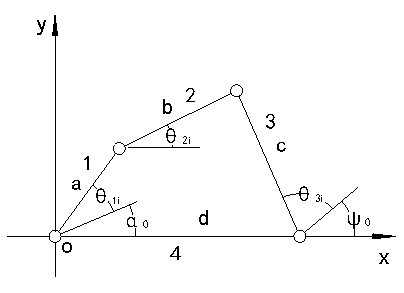
设要求从动件3与主动件1的转角之间满足一系列的对应位置关系,即 =
= i=1,2,… ,n其函数的运动变量为
i=1,2,… ,n其函数的运动变量为 由设计要求知
由设计要求知
 、
、 为已知条件。有
为已知条件。有 为未知。又因为机构按比例放大或缩小,不会改变各机构的相对角度关系,故设计变量应该为各构件的相对长度,如取d/a=1 , b/a=l c/a=m , d/a=n 。故设计变量l、m、n以及、的计量起始角
为未知。又因为机构按比例放大或缩小,不会改变各机构的相对角度关系,故设计变量应该为各构件的相对长度,如取d/a=1 , b/a=l c/a=m , d/a=n 。故设计变量l、m、n以及、的计量起始角 、共五个。如图所示建立坐标系Oxy,并把各杆矢量向坐标轴投影,可得
、共五个。如图所示建立坐标系Oxy,并把各杆矢量向坐标轴投影,可得



为消去未知角 ,将上式 两端各自平方后相加,经整理可得
,将上式 两端各自平方后相加,经整理可得
 令
令 =m,
=m,  =-m/n,
=-m/n,  =
= ,则上式可简化为:
,则上式可简化为:

 2-2
2-2
式 2-2 中包含5个待定参数、、、 、及
、及 ,故四杆机构最多可以按两连架杆的5个对应位置精度求解。
,故四杆机构最多可以按两连架杆的5个对应位置精度求解。
2.2 按期望函数设计
如上图所示,
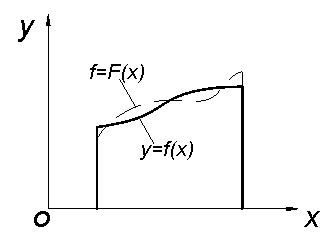
设要求设计四杆机构两连架杆转角之间实现的函数关系  (成为期望函数),由于连架杆机构的待定参数较少,故一般不能准确实现该期望函数。设实际实现的函数为月
(成为期望函数),由于连架杆机构的待定参数较少,故一般不能准确实现该期望函数。设实际实现的函数为月  (成为再现函数),再现函数与期望函数一般是不一致的。设计时应该使机构的再现函数尽可能逼近所要求的期望函数。具体作法是:在给定的自变量x的变化区间
(成为再现函数),再现函数与期望函数一般是不一致的。设计时应该使机构的再现函数尽可能逼近所要求的期望函数。具体作法是:在给定的自变量x的变化区间  到
到  内的某点上,使再现函数与期望函数的值相等。从几何意义上 与 两函数曲线在某些点相交。
内的某点上,使再现函数与期望函数的值相等。从几何意义上 与 两函数曲线在某些点相交。
这些点称为插值结点。显然在结点处:

故在插值结点上,再现函数的函数值为已知。这样,就可以按上述方法来设计四杆机构。这种设计方法成为插值逼近法。
在结点以外的其他位置,与是不相等的,其偏差为

偏差的大小与结点的数目及其分布情况有关,增加插值结点的数目,有利于逼近精度的提高。但结点的数目最多可为5个。至于结点位置分布,根据函数逼近理论有
 2-3
2-3
试中i=1,2, … ,3,n为插值结点数。
本节介绍了采用期望函数设计四杆机构的原理。那么在第3节将
具体阐述连杆机构的设计。
第3节 连杆机构设计
3.1连杆机构设计
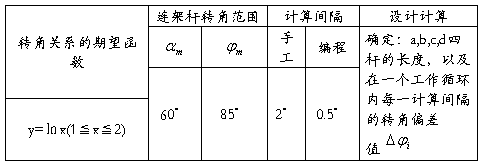
设计参数表
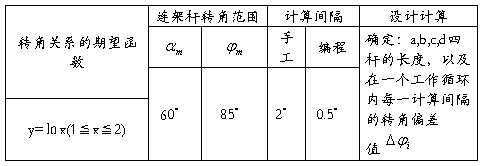
注:本次采用编程计算,计算间隔0.5°
3.2变量和函数与转角之间的比例尺
根据已知条件y=㏑x(1≦x≦2)为铰链四杆机构近似的实现期望函数,
设计步骤如下:
(1)根据已知条件 ,
, ,可求得
,可求得 ,
, 。
。
(2)由主、从动件的转角范围 =60°、
=60°、 =85°确定自变量和函数与转角之间的比例尺分别为:
=85°确定自变量和函数与转角之间的比例尺分别为:

 3—1
3—1
3.3确定结点值
设取结点总数m=3,由式2-3可得各结点处的有关各值如表(3-1)所示。
表(3-1) 各结点处的有关各值

3.4 确定初始角、
通常我们用试算的方法来确定初始角、,而在本次连杆设计中将通过编程试算的方法来确定。具体思路如下:
任取、,把、取值与上面所得到的三个结点处的 、
、 的值代入P134式8-17
的值代入P134式8-17

从而得到三个关于 、
、 、
、 的方程组,求解方程组后得出、、,再令=m, =-m/n, =
的方程组,求解方程组后得出、、,再令=m, =-m/n, = 。然
。然
求得后m,n,l的值。由此我们可以在机构确定的初始值条件下找
到任意一位置的期望函数值与再现函数值的偏差值。当
 时,则视为选取的初始、角度满足机构的运动要求。
时,则视为选取的初始、角度满足机构的运动要求。
具体程序如下:
#include<stdio.h>
#include<math.h>
#define PI 3.1415926
#define t PI/180
void main()
{
int i;
float p0,p1,p2,a0,b0,m,n,l,a5;
float A,B,C,r,s,f1,f2,k1,k2,j;
float u1=1.0/60,u2=0. 93/685,x0=1.0,y0=0.0;
float a[3],b[3],a1[6],b1[3];
FILE *p;
if((p=fopen("d:\\zdp.txt","w"))==NULL)
{
printf("can't open the file!");
exit(0);
}
a[0]=4.02;
a[1]=30;
a[2]=55.98;
b[0]=7.97;
b[1]=49.68;
b[2]=80.83;
printf("please input a0: \n");
scanf("%f",&a0);
printf("please input b0: \n");
scanf("%f",&b0);
for(i=0;i<3;i++)
{
a1[i]=cos((b[i]+b0)*t);
a1[i+3]=cos((b[i]+b0-a[i]-a0)*t);
b1[i]=cos((a[i]+a0)*t);
}
p0=((b1[0]-b1[1])*(a1[4]-a1[5])-(b1[1]-b1[2])*(a1[3]-a1[4]))/
((a1[0]-a1[1])*(a1[4]-a1[5])-(a1[1]-a1[2])*(a1[3]-a1[4]));
p1=(b1[0]-b1[1]-(a1[0]-a1[1])*p0)/(a1[3]-a1[4]);
p2=b1[0]-a1[0]*p0-a1[3]*p1;
m=p0;
n=-m/p1;
l=sqrt(m*m+n*n+1-2*n*p2);
printf("p0=%f,p1=%f,p2=%f,m=%f,n=%f,l=%f\n",p0,p1,p2,m,n,l);
fprintf(p,"p0=%f,p1=%f,p2=%f,m=%f,n=%f,l=%f\n",p0,p1,p2,m,n,l);
printf("\n");
fprintf(p,"\n");
for(i=0;i<5;i++)
{printf("please input one angle of fives(0--60): ");
scanf("%f",&a5);
printf("when the angle is %f\n",a5);
fprintf(p,"when the angle is %f\n",a5);
A=sin((a5+a0)*t);
B=cos((a5+a0)*t)-n;
C=(1+m*m+n*n-l*l)/(2*m)-n*cos((a5+a0)*t)/m;
j=x0+u1*a5;
printf("A=%f,B=%f,C=%f,j=%f\n",A,B,C,j);
s=sqrt(A*A+B*B-C*C);
f1=2*(atan((A+s)/(B+C)))/(t)-b0;
f2=2*(atan((A-s)/(B+C)))/(t)-b0;
r=(log(j)-y0)/u2;
k1=f1-r;
k2=f2-r;
printf("r=%f,s=%f,f1=%f,f2=%f,k1=%f,k2=%f\n",r,s,f1,f2,k1,k2);
fprintf(p,"r=%f,s=%f,f1=%f,f2=%f,k1=%f,k2=%f\n",r,s,f1,f2,k1,k2);
printf("\n\n");
fprintf(p,"\n\n");
}
}
结合课本P135,试取=86°,=24°时:
程序运行及其结果为:
p0=0.601242,p1=-0.461061,p2=-0.266414,m=0.601242,n=1.304040,l=1.938257
when the angle is 0.000000
r=0.000000,s=1.409598,f1=-125.595070,f2=-0.296147,k1=-125.595070,k2=-0.296147
when the angle is 4.020000
r=7.954308,s=1.538967,f1=-130.920624,f2=7.970002,k1=-138.874939,k2=0.015694
when the angle is 30.000000
r=49.732372,s=1.924767,f1=-152.252411,f2=49.680004,k1=-201.984787,k2=-0.052368
when the angle is 55.980000
r=80.838707,s=1.864505,f1=-161.643921,f2=80.830002,k1=-242.482635,k2=-0.008705
when the angle is 60.000000
r=85.018051,s=1.836746,f1=-162.288574,f2=84.909149,k1=-247.306625,k2=-0.108902
由程序运行结果可知:当取初始角=86°、 =24°时(=k1(k2))所以所选初始角符合机构的运动要求。
=24°时(=k1(k2))所以所选初始角符合机构的运动要求。
3.5 杆长比m,n,l的确定
由上面的程序结果可得m=0.601242, n=1.304040, l=1.938257。
3.6 检查偏差值
对于四杆机构,其再现的函数值可由P134式8-16求得
 3-2
3-2
式中: A=sin( ) ;
) ;
B=cos()-n ;
C= - ncos()/m
- ncos()/m
按期望函数所求得的从动件转角为
 3-3
3-3
则偏差为

若偏差过大不能满足设计要求时,则应重选计量起始角
、 以及主、从动件的转角变化范围、等,重新进行设计。同样由上面的程序运行结果得出每一个取值都符合运动要求,即 :
以及主、从动件的转角变化范围、等,重新进行设计。同样由上面的程序运行结果得出每一个取值都符合运动要求,即 :
=k1(k2)) (
3.7 杆长的确定
根据杆件之间的长度比例关系m,n,l和这样的关系式b/a=l c/a=m d/a=n确定各杆的长度,当选取主动杆的长度后,其余三杆长的度随之可以确定;在此我们假设主动连架杆的长度为 a=50 ,则确定其余三杆的长度由下面的程序确定:
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
void main()
{
float a=50,b,c,d;
float m=0.601242,n=1.304040,l=1.938257;
FILE *p;
if((p=fopen("d:\\zdp.txt","w"))=NULL)
{
printf("can't open the file!");
exit(0);
}
b=l*a;
c=m*a;
d=n*a;
printf("a=%f\nb=%f\nc=%f\nd=%f\n",a,b,c,d);
fprintf(p,"a=%f\nb=%f\nc=%f\nd=%f\n",a,b,c,d);
fclose(p);
}
运行结果为:
a=50.000000
b=96.912849
c=30.062099
d=65.201996
3.8 连架杆在各位置的再现函数和期望函数最小差值的确定
如下面的程序:
#include<stdio.h>
#include<math.h>
#include<stdlib.h>
#define PI 3.1415926
#define t PI/180
void main()
{
float a0=86,b0=24,m=0.601242,n=1.304040,l=1.938257;
float A,B,C,s,j,k1,k2,k;
float x0=1.0,y0=0.0,u1=1.0/60,u2=0.693/85 ;
float x[130],y1[130],y2[130],a1[130],f1[130],f2[130],r[130];
int i;
FILE *p;
if((p=fopen("d:\\zdp.txt","w"))==NULL)
{
printf("can't open the file! ");
exit(0);
}
printf(" i a1[i] f1[i] r[i] k x[i] y1[i] y2[i]\n\n");
fprintf(p," i a1[i] f1[i] r[i] k x[i] y1[i] y2[i]\n\n");
for(i=0; a1[i]<=60;i++)
{
a1[0]=0;
A=sin((a1[i]+a0)*t);
B=cos((a1[i]+a0)*t)-n;
C=(1+m*m+n*n-l*l)/(2*m)-n*cos((a1[i]+a0)*t)/m;
j=x0+u1*a1[i];
s=sqrt(A*A+B*B-C*C);
f1[i]=2*(atan((A+s)/(B+C)))/(t)-b0;
f2[i]=2*(atan((A-s)/(B+C)))/(t)-b0;
r[i]=(log(j)-y0)/u2;
k1=f1[i]-r[i];
k2=f2[i]-r[i];
x[i]=a1[i]*u1+x0;
y2[i]=log(x[i]);
if(abs(k1)
{
k=k1;
y1[i]=f1[i]*u2+y0;
printf(" %-4d %-5.1f %-10.4f %-8.4f %-8.4f %-7.4f %-8.4f %0.4f\n",i,a1[i],f1[i],r[i],k,x[i],y1[i],y2[i]);
fprintf(p," %-4d %-5.1f %-10.4f %-8.4f %-8.4 %-7.4f %-8.4f %0.4f\n",i,a1[i],f1[i],r[i],k,x[i],y1[i],y2[i]);
}
else
{
k=k2;
y1[i]=f2[i]*u2+y0;
printf(" %-6d%-7.1f%-12.4f%-10.4f%-10.4f%-9.4f%-10.4f%2.4f\n",i,
a1[i],f2[i],r[i],k,x[i],y1[i],y2[i]);
fprintf(p,"%-6d%-7.1f%-12.4f%-10.4f%-10.4f%-9.4f%-10.4f%2.4f\n",i,
a1[i],f2[i],r[i],k,x[i],y1[i],y2[i]);
}
a1[i+1]=a1[i]+0.5;
}
fclose(p);
}
程序运行结果见附录。
总结
通过本次课程设计,让我学会了用解析法中的按期望函数设计连杆机构,理解了这一设计原理,知道怎样实现连杆机构两连架杆的转角之间的期望函数与再现函数之间的关系。
在本次设计中,有一个非常重要的环节——确定初始角、的值。这一环节我采用了C程序的方法来求解。虽然没有用笔算那样繁琐,但是在编写程序时,由于公式多,公式中设计的三角函数比较麻烦,因而在设计中我遇到了很多大小不同的问题,但是最终凭借对公式的理解和对C程序的进一步掌握完成了这一解析问题。只有确定了初始角、,才能正确检查偏差值,得到一对最理想的初始角使得偏差值。通过C程序的求解,得出的结果说明能较好的满足连杆机构的设计要求。
本次课程设计,从不知道如何下手到完成。我学到了很多的东西,掌握了课程设计书的书写格式,为以后的设计打下了良好的基础。
参考文献:
【1】孙恒,陈作模,葛文杰 . 机械原理[M] . 7版 . 北京:高等教育出版社,2006。
【2】孙恒,陈作模 . 机械原理[M] . 6版 . 北京:高等教育出版社,2001。
附录:i为序列号 a1[i]= f1[i]= r[i] =
f1[i]= r[i] = k =
k =
x[i]为自变量 y1[i]为再现函数值 y2[i]为望函数值
i a1[i] f1[i] r[i] k x[i] y1[i] y2[i]
0 0.0 -0.2961 0.0000 -0.2961 1.0000 -0.0024 0.0000
1 0.5 0.7781 1.0179 -0.2398 1.0083 0.0063 0.0083
2 1.0 1.8380 2.0274 -0.1894 1.0167 0.0150 0.0165
3 1.5 2.8844 3.0287 -0.1443 1.0250 0.0235 0.0247
4 2.0 3.9177 4.0218 -0.1041 1.0333 0.0319 0.0328
5 2.5 4.9385 5.0070 -0.0685 1.0417 0.0403 0.0408
6 3.0 5.9474 5.9844 -0.0370 1.0500 0.0485 0.0488
7 3.5 6.9446 6.9540 -0.0093 1.0583 0.0566 0.0567
8 4.0 7.9308 7.9160 0.0148 1.0667 0.0647 0.0645
9 4.5 8.9063 8.8705 0.0358 1.0750 0.0726 0.0723
10 5.0 9.8715 9.8177 0.0538 1.0833 0.0805 0.0800
11 5.5 10.8267 10.7575 0.0692 1.0917 0.0883 0.0877
12 6.0 11.7723 11.6903 0.0821 1.1000 0.0960 0.0953
13 6.5 12.7087 12.6160 0.0927 1.1083 0.1036 0.1029
14 7.0 13.6360 13.5348 0.1013 1.1167 0.1112 0.1103
15 7.5 14.5547 14.4467 0.1080 1.1250 0.1187 0.1178
16 8.0 15.4649 15.3519 0.1130 1.1333 0.1261 0.1252
17 8.5 16.3670 16.2505 0.1166 1.1417 0.1334 0.1325
18 9.0 17.2612 17.1425 0.1187 1.1500 0.1407 0.1398
19 9.5 18.1476 18.0281 0.1195 1.1583 0.1480 0.1470
20 10.0 19.0266 18.9074 0.1193 1.1667 0.1551 0.1542
21 10.5 19.8984 19.7804 0.1180 1.1750 0.1622 0.1613
22 11.0 20.7631 20.6472 0.1159 1.1833 0.1693 0.1683
23 11.5 21.6208 21.5079 0.1129 1.1917 0.1763 0.1754
24 12.0 22.4720 22.3627 0.1093 1.2000 0.1832 0.1823
25 12.5 23.3165 23.2115 0.1050 1.2083 0.1901 0.1892
26 13.0 24.1548 24.0545 0.1003 1.2167 0.1969 0.1961
27 13.5 24.9868 24.8917 0.0950 1.2250 0.2037 0.2029
28 14.0 25.8128 25.7233 0.0895 1.2333 0.2104 0.2097
29 14.5 26.6328 26.5493 0.0836 1.2417 0.2171 0.2165
30 15.0 27.4471 27.3697 0.0774 1.2500 0.2238 0.2231
31 15.5 28.2558 28.1847 0.0711 1.2583 0.2304 0.2298
32 16.0 29.0589 28.9943 0.0646 1.2667 0.2369 0.2364
33 16.5 29.8566 29.7986 0.0580 1.2750 0.2434 0.2429
34 17.0 30.6491 30.5976 0.0514 1.2833 0.2499 0.2495
35 17.5 31.4363 31.3915 0.0448 1.2917 0.2563 0.2559
36 18.0 32.2186 32.1803 0.0382 1.3000 0.2627 0.2624
37 18.5 32.9958 32.9641 0.0317 1.3083 0.2690 0.2688
38 19.0 33.7682 33.7428 0.0253 1.3167 0.2753 0.2751
39 19.5 34.5357 34.5167 0.0190 1.3250 0.2816 0.2814
40 20.0 35.2986 35.2857 0.0129 1.3333 0.2878 0.2877
41 20.5 36.0569 36.0499 0.0070 1.3417 0.2940 0.2939
42 21.0 36.8107 36.8094 0.0013 1.3500 0.3001 0.3001
43 21.5 37.5600 37.5642 -0.0042 1.3583 0.3062 0.3063
44 22.0 38.3049 38.3144 -0.0094 1.3667 0.3123 0.3124
45 22.5 39.0455 39.0600 -0.0144 1.3750 0.3183 0.3185
46 23.0 39.7819 39.8011 -0.0192 1.3833 0.3243 0.3245
47 23.5 40.5142 40.5378 -0.0236 1.3917 0.3303 0.3305
48 24.0 41.2423 41.2700 -0.0277 1.4000 0.3362 0.3365
49 24.5 41.9664 41.9980 -0.0315 1.4083 0.3421 0.3424
50 25.0 42.6866 42.7216 -0.0351 1.4167 0.3480 0.3483
51 25.5 43.4028 43.4410 -0.0382 1.4250 0.3539 0.3542
52 26.0 44.1151 44.1562 -0.0411 1.4333 0.3597 0.3600
53 26.5 44.8236 44.8672 -0.0437 1.4417 0.3654 0.3658
54 27.0 45.5283 45.5742 -0.0459 1.4500 0.3712 0.3716
55 27.5 46.2293 46.2771 -0.0478 1.4583 0.3769 0.3773
56 28.0 46.9267 46.9760 -0.0493 1.4667 0.3826 0.3830
57 28.5 47.6203 47.6709 -0.0505 1.4750 0.3882 0.3887
58 29.0 48.3105 48.3619 -0.0515 1.4833 0.3939 0.3943
59 29.5 48.9970 49.0491 -0.0520 1.4917 0.3995 0.3999
60 30.0 49.6801 49.7324 -0.0523 1.5000 0.4050 0.4055
61 30.5 50.3596 50.4119 -0.0523 1.5083 0.4106 0.4110
62 31.0 51.0357 51.0877 -0.0520 1.5167 0.4161 0.4165
63 31.5 51.7084 51.7598 -0.0513 1.5250 0.4216 0.4220
64 32.0 52.3778 52.4282 -0.0504 1.5333 0.4270 0.4274
65 32.5 53.0438 53.0930 -0.0492 1.5417 0.4325 0.4329
66 33.0 53.7064 53.7542 -0.0478 1.5500 0.4379 0.4383
67 33.5 54.3658 54.4119 -0.0461 1.5583 0.4432 0.4436
68 34.0 55.0219 55.0660 -0.0441 1.5667 0.4486 0.4490
69 34.5 55.6748 55.7167 -0.0419 1.5750 0.4539 0.4543
70 35.0 56.3244 56.3640 -0.0396 1.5833 0.4592 0.4595
71 35.5 56.9709 57.0079 -0.0370 1.5917 0.4645 0.4648
72 36.0 57.6142 57.6484 -0.0342 1.6000 0.4697 0.4700
73 36.5 58.2543 58.2855 -0.0312 1.6083 0.4749 0.4752
74 37.0 58.8913 58.9194 -0.0281 1.6167 0.4801 0.4804
75 37.5 59.5252 59.5500 -0.0248 1.6250 0.4853 0.4855
76 38.0 60.1559 60.1774 -0.0215 1.6333 0.4904 0.4906
77 38.5 60.7836 60.8016 -0.0180 1.6417 0.4956 0.4957
78 39.0 61.4082 61.4227 -0.0144 1.6500 0.5007 0.5008
79 39.5 62.0298 62.0406 -0.0108 1.6583 0.5057 0.5058
80 40.0 62.6483 62.6554 -0.0071 1.6667 0.5108 0.5108
81 40.5 63.2637 63.2671 -0.0034 1.6750 0.5158 0.5158
82 41.0 63.8761 63.8758 0.0003 1.6833 0.5208 0.5208
83 41.5 64.4855 64.4815 0.0040 1.6917 0.5257 0.5257
84 42.0 65.0919 65.0843 0.0076 1.7000 0.5307 0.5306
85 42.5 65.6953 65.6841 0.0112 1.7083 0.5356 0.5355
86 43.0 66.2957 66.2809 0.0147 1.7167 0.5405 0.5404
87 43.5 66.8930 66.8749 0.0182 1.7250 0.5454 0.5452
88 44.0 67.4874 67.4660 0.0214 1.7333 0.5502 0.5500
89 44.5 68.0788 68.0543 0.0246 1.7417 0.5550 0.5548
90 45.0 68.6672 68.6397 0.0275 1.7500 0.5598 0.5596
91 45.5 69.2527 69.2224 0.0302 1.7583 0.5646 0.5644
92 46.0 69.8351 69.8024 0.0328 1.7667 0.5694 0.5691
93 46.5 70.4146 70.3796 0.0350 1.7750 0.5741 0.5738
94 47.0 70.9911 70.9541 0.0370 1.7833 0.5788 0.5785
95 47.5 71.5645 71.5259 0.0386 1.7917 0.5835 0.5831
96 48.0 72.1350 72.0950 0.0400 1.8000 0.5881 0.5878
97 48.5 72.7025 72.6616 0.0409 1.8083 0.5927 0.5924
98 49.0 73.2670 73.2255 0.0415 1.8167 0.5973 0.5970
99 49.5 73.8285 73.7869 0.0416 1.8250 0.6019 0.6016
100 50.0 74.3870 74.3457 0.0413 1.8333 0.6065 0.6061
101 50.5 74.9425 74.9019 0.0405 1.8417 0.6110 0.6107
102 51.0 75.4949 75.4557 0.0392 1.8500 0.6155 0.6152
103 51.5 76.0443 76.0069 0.0374 1.8583 0.6200 0.6197
104 52.0 76.5907 76.5557 0.0350 1.8667 0.6244 0.6242
105 52.5 77.1340 77.1021 0.0319 1.8750 0.6289 0.6286
106 53.0 77.6743 77.6460 0.0283 1.8833 0.6333 0.6330
107 53.5 78.2114 78.1875 0.0239 1.8917 0.6377 0.6375
108 54.0 78.7456 78.7267 0.0189 1.9000 0.6420 0.6419
109 54.5 79.2766 79.2635 0.0131 1.9083 0.6463 0.6462
110 55.0 79.8045 79.7979 0.0066 1.9167 0.6506 0.6506
111 55.5 80.3292 80.3300 -0.0008 1.9250 0.6549 0.6549
112 56.0 80.8509 80.8599 -0.0090 1.9333 0.6592 0.6592
113 56.5 81.3694 81.3874 -0.0180 1.9417 0.6634 0.6635
114 57.0 81.8847 81.9127 -0.0280 1.9500 0.6676 0.6678
115 57.5 82.3968 82.4357 -0.0389 1.9583 0.6718 0.6721
116 58.0 82.9058 82.9566 -0.0508 1.9667 0.6759 0.6763
117 58.5 83.4115 83.4752 -0.0637 1.9750 0.6800 0.6806
118 59.0 83.9140 83.9916 -0.0776 1.9833 0.6841 0.6848
119 59.5 84.4133 84.5059 -0.0927 1.9917 0.6882 0.6890
120 60.0 84.9092 85.0181 -0.1088 2.0000 0.6923 0.6931