福州大学至诚学院
《自动化系统集成实践》
题 目:
姓 名: 林金都
学 号: 210992168
系 别: 电气工程及其自动化
专 业: 自动化
年 级: 20##
起讫日期:
指导教师: 蔡逢煌
目 录
1、认识实践目的和要求................................ 2
2、实践内容.......................................... 2
3、实践心得体会..................................... 19
1、认识实践目的
《自动化系统集成实践》是电气工程与自动化类专业的一门重要的专业实践选修课,是电气控制与PLC、过程控制、组态软件、计算机控制、数据通信与计算机网络等多学科的交叉综合应用实践,着重养学生的实践和综合应用能力,开拓学生学习积极性、主动性,为今后从事自动化系统集成设计打下良好的基础。
实验课程目标与基本要求
1)通过学习,让学生自己动手实践,实现自动控制系统严格规范的训练,使学生掌握自动控制系统的基本方法和基本技能。
2)通过学习,培养学生提出问题,查阅资料,设计方案,动手实践,观察现象,分析结果的能力,达到学生解决基本系统设计问题的学习目标。
3)通过学习,初步掌握电气电路原理图的读图,掌握从电路图转变成接线图的系统接线过程。
4)通过实践,掌握PLC编程的方法,掌握程序调试的方法。
基本要求:
A) 读懂工程图纸,学会照图完成安装接线,掌握检查方法;
B)学习根据控制要求编制和调试PLC程序的方法;
C) 学习系统调试和分析、查找、排除故障的方法。
2、实践内容
Me093399型机电一体化教学系统是以工业生产中的自动化装配生产线为原型开发的教学、实验、实训综合应用平台。本装置采用铝合金结构件搭建各分站主体设备,选取多种机械传动方式实现站间串联,整体生产线充分展现了实际工业生产中的典型部分。系统控制过程中除涵盖多种基本控制方法外,还凸现组态控制、工业总线、电脑视觉、实时监控等先进技术,为培养现代化应用型人才创设了完整、灵活、模块化、易扩展的理想工业场景。
完成本实训项目涉及到现场所需的诸多综合技术应用,如:机械传动技术、电气控制技术、气动与液压技术、传感器的应用、PLC控制技术、过程控制技术和现代化生产中的组态控制、工业总线、电脑视觉、实时监控等。
在项目设计时应由易到难,逐步深入,可从单站开展入手,到现场总线控制和对整个模拟生产线的实时监控。
2.1 模块介绍
整条流水线包括了上料单元、下料单元、加盖单元、穿销电源、检测单元、伸缩单元等。
上料单元的工作原理:1、当有工件放入工件槽时,工件传感器发出检测信号,工作指示灯发光,控制扬臂顺时旋转的电机带动行星齿轮动作,使扬臂顺向旋转90度,对准工件槽。2、扬臂旋转到位后,气动回路的电磁换向阀动作,气缸活塞杆收回,带动扬臂终端电磁铁下降。3、气缸活塞杆伸出到位后,电磁吸铁得电,通过主体工件安装的金属条吸取工件,吸持工件2s后,气动回路电磁换向阀复位,气缸活塞杆收回,电磁铁持工件回缩(若一次吸合未果,即安装在电磁吸铁上的微动开关未发出信号,蜂鸣器发出报警信号)。
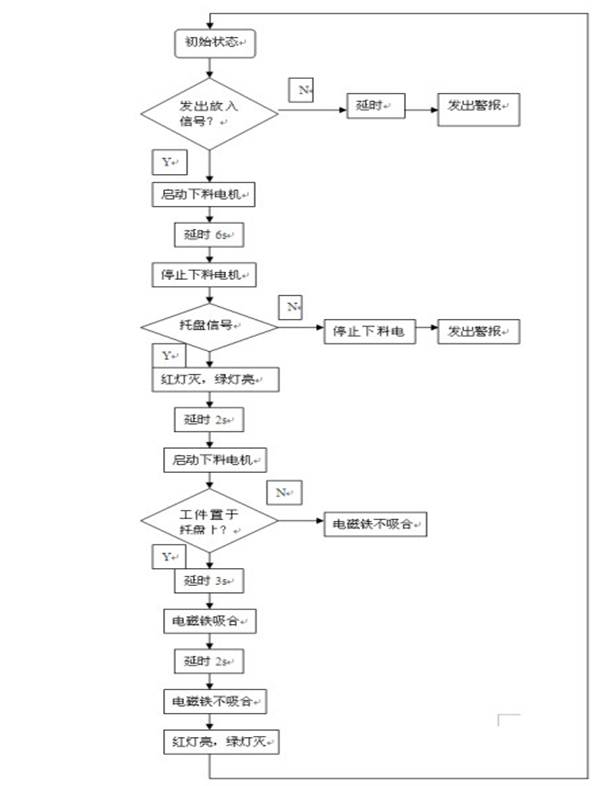
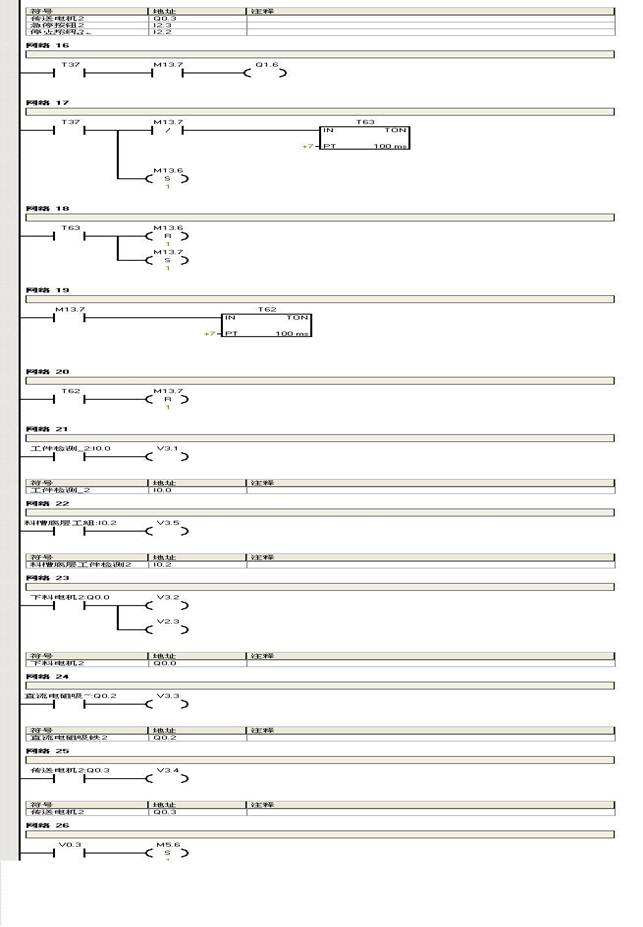
下料单元的工作原理:1、当前站上料单元向料仓中放入工件发出信号,经过4s时间确认后,启动下料电机执行将工件主体下落动作。2、当工件主体下落6s后,若无托盘到位信号,则停止下料电机运行,将工件置于料仓中等待。3、当托盘到达定位口时,底层的电感式传感器发出检测信号,红色指示灯熄灭,绿色指示灯发光;经过2s时间确认后,启动下料电机继续执行将工件主体下落动作。4、检测到托盘到位信号,当工件下落至托盘时,工件检测传感器发出检测信号,延时3s确认后,直流电磁铁吸合下落,放行托盘。5、托盘放行2s后,电磁吸铁释放处于禁止状态,绿色指示灯熄灭,红色指示灯发光,系统恢复初始状态。说明:若下料电机从料仓入口至出口动作一个行程后工件检测传感器仍无检测信号,此时报警器发出警报,提示运行人员需在料仓中装入工作(本套设备中通过延时进行控制)6、控制系统应具有启动、停止、急停、复位控制盒工作方式选择控制。
加盖单元的工作原理:1、当托盘载工作主件到达定位口时,由电感式传感器检测托盘,发出检测信号,绿色指示灯亮,红色指示灯灭,由电容式传感器检测上盖,确认无上盖信号后,经3s确认后启动主摆臂执行加盖动作。2、PLC通过两个继电器控制电机正反转,带动减速机使摆臂动作,主摆臂从料槽中取出上盖,翻转180度。当碰到放件控制板时复位弹簧松开,此时摆臂碰到外限位开关后结束加盖动作,上盖靠自重落入工件主体内,,3s后启功摆臂执行返回原位动作。3、摆臂返回后限位开关发出信号,摆臂结束返回动作,此时若上盖安装到位,即上盖传感器发出检测信号,则通过3s确定后直流电磁铁吸合下落将托盘放行(若上盖安装为空操作,即上盖检测器无检测信号,摆臂应再次执行加盖动作,直到上盖安装到位)。4、放行3s后,电磁铁释放,恢复限位状态,绿色指示灯灭,红色指示灯亮。该站恢复预备工作状态。5、若摆臂往复3次加装动作后上盖传感器仍无检测信号,此时报警器发出警报,提示运行人员需在料槽中装入上盖。
6、控制系统应具有启动、停止急停、复位控制和工作方式选择控制。
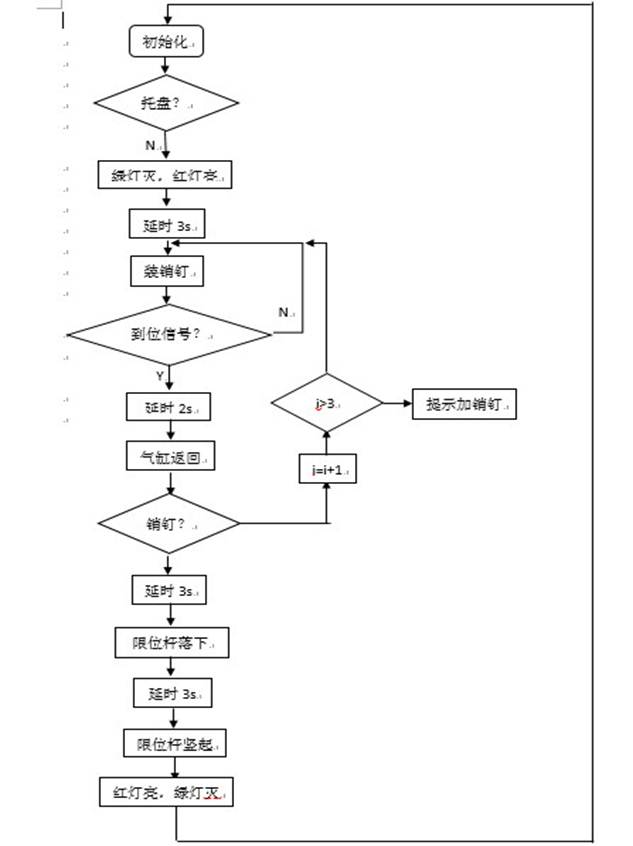
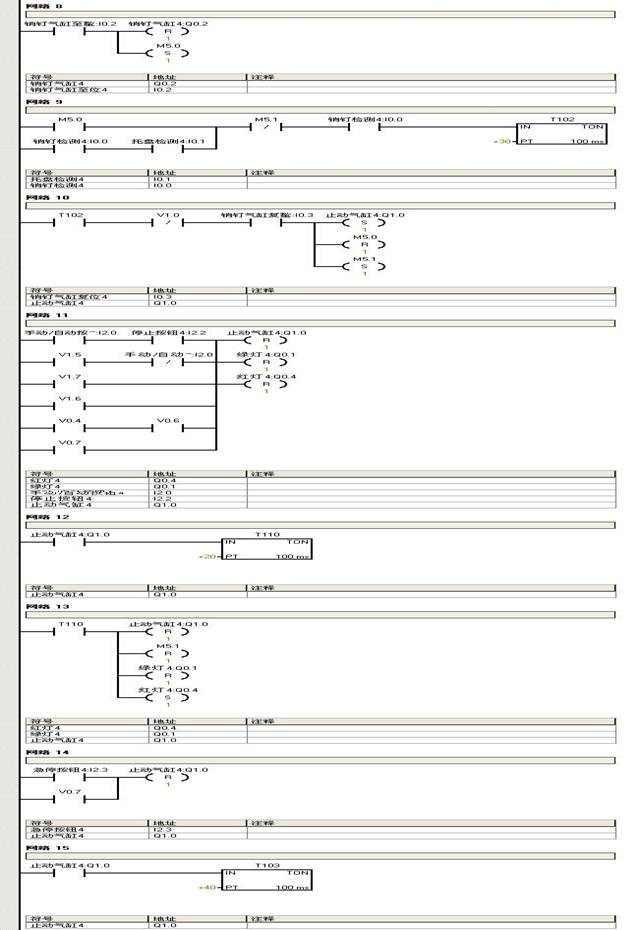
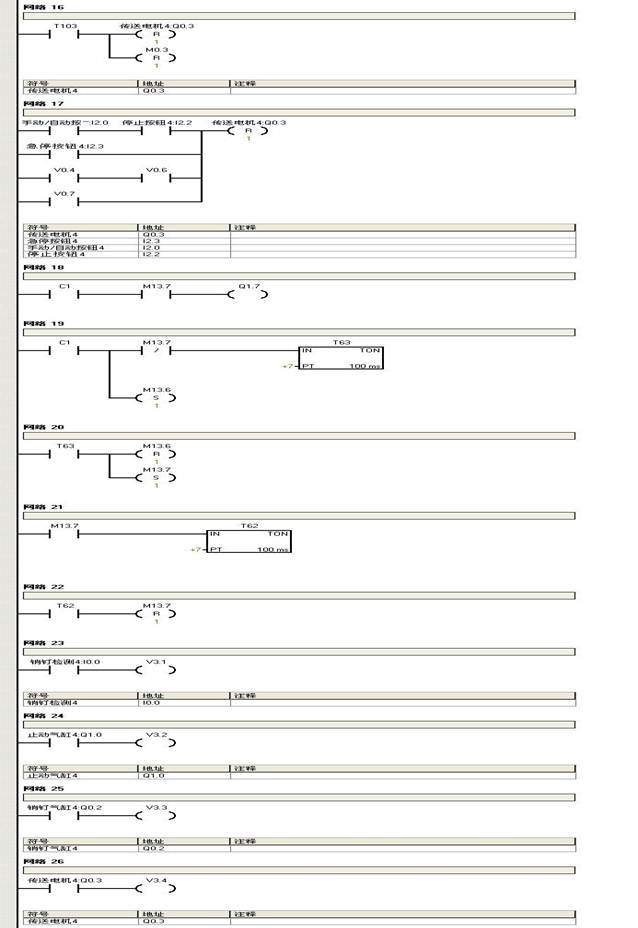
穿销单元的控制原理:当托盘载工件到达定位口时,托盘传感器发出检测信号,且确认无销钉信号后,绿色指示灯亮,红色指示灯灭,经3s确认后,销钉气缸推进执行装销钉动作。2、当销钉气缸发出至位检测信号后结束推进动作,延时2s后自动返回。3、气缸返回至复位状态且接收到销钉检测信号,进行3s延时,止动气缸工作使限位杆落下将托盘放行。(若销钉安装为空操作,2s后销钉检测传感器仍无信号,再次执行安装动作,直到销钉安装到位。)4、放行3s后,限位杆竖起禁行状态,绿色指示灯灭,红色指示灯亮。系统恢复初始状态。5、本站销钉连续穿3次后传感器还未检测到有销钉穿入,警报器报警,此时应在销钉下料仓内加入销钉。6、控制系统应具有启动、停止、急停、复位控制和工作方式选择控制。
检测单元的工作原理:系统启动运行后本单元红色指示灯发光,直线电机驱动传送带开始运转且始终保持运行状态(分单元运行时可选用与PLC运行/停止同状态的特殊继电器保持直线传送电机的运行状态)。系统运行期间:1、当托盘带工件进入本站后,运行3s延时,绿色指示灯亮;红色指示灯灭;产品检测开始2、产品检测要求如下:上盖检测(上盖为1/无上盖为0);销钉材质检测(金属为1/非金属为0);色差检测(贴签为1/未贴签为0);销钉检测(穿销为1/未穿销为0);3、产品检测工作开始3s后,直流电磁铁吸合下落放行托盘。4、放行托盘3s后直流电磁铁释放恢复禁行状态,此时系统恢;复初始状态,红色指示灯发光,绿色指示灯熄灭。
伸缩换向单元的工作原理:1、当有工件送至换向机构时,工件传感器发出检测信号,换向传送带停转;换向气缸输出带动转盘顺时针正转;工作指示灯发光。2、换向气缸旋转90°到位后发出信号,启动换向传送带反转,将工件送向单元Ⅱ。3、工件传送至直线单元Ⅱ时货叉下的托盘传感器发出检测信号,换向传送带停转;转向气缸带动转盘逆时针反转回位,换向传送带正转,处于准备接件状态,提升气缸启动持弓箭上升。4、提升气缸上升至终端,启动旋转电机持工件顺时针正转。5、选转电机旋转180°到位后限位开关发出信号,启动伸缩电机正转伸出送件。6、伸缩电机送件到位后限位开关发出信号,释放提升气缸使其持工件下降。7、当提升气缸下降到位后发出信号,3s后再次启动提升气缸由下降改为上升。8、提升气缸上升至终端后发出信号,启动伸缩电机反转回缩。9、伸缩电机回缩原位后限位开关发出信号,启动伸缩电机逆时针反转回原位。10、当旋转电机旋转180°回到原位后限位开关发出信号,释放提升气缸下降。11、当提升气缸下降到位后发出信号,工作指示灯熄灭。系统回复初始状态。
这几个模块单元中所用到的传动机构包括齿轮、链条、皮带、气动,伸缩臂等,传感器包括限位开关、电容传感器,电感传感器,光电传感器等。这些机构分别组成不同的执行机构和反馈机构,共同组成了自动化流水线。
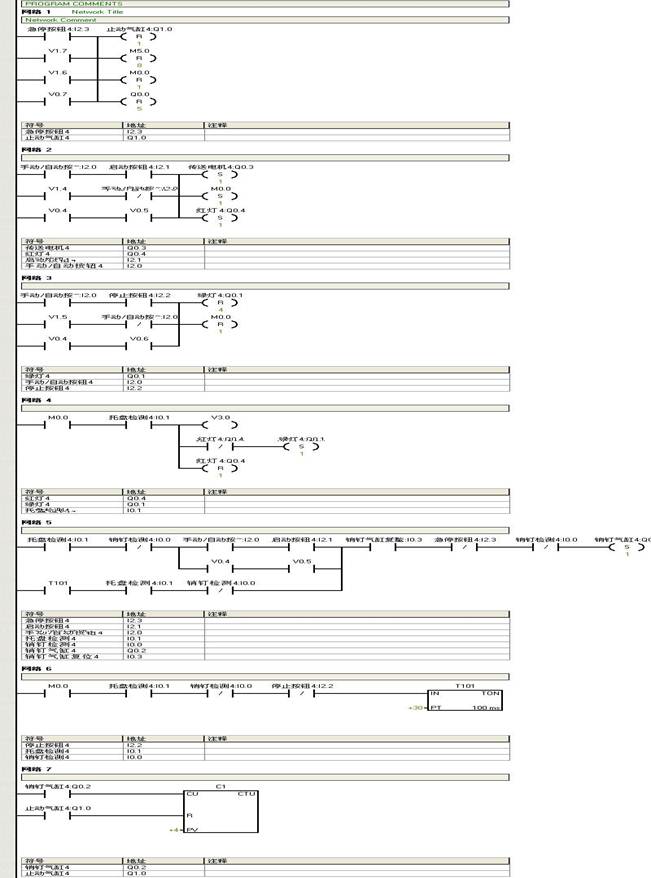
2.2 软件框架
下料的流程图:
加盖的流程图:

穿销的流程图:
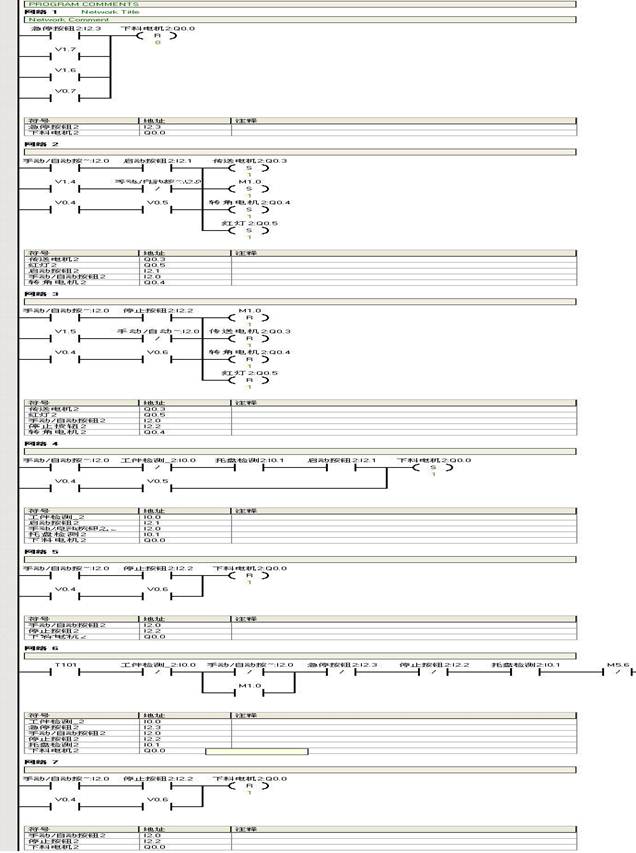
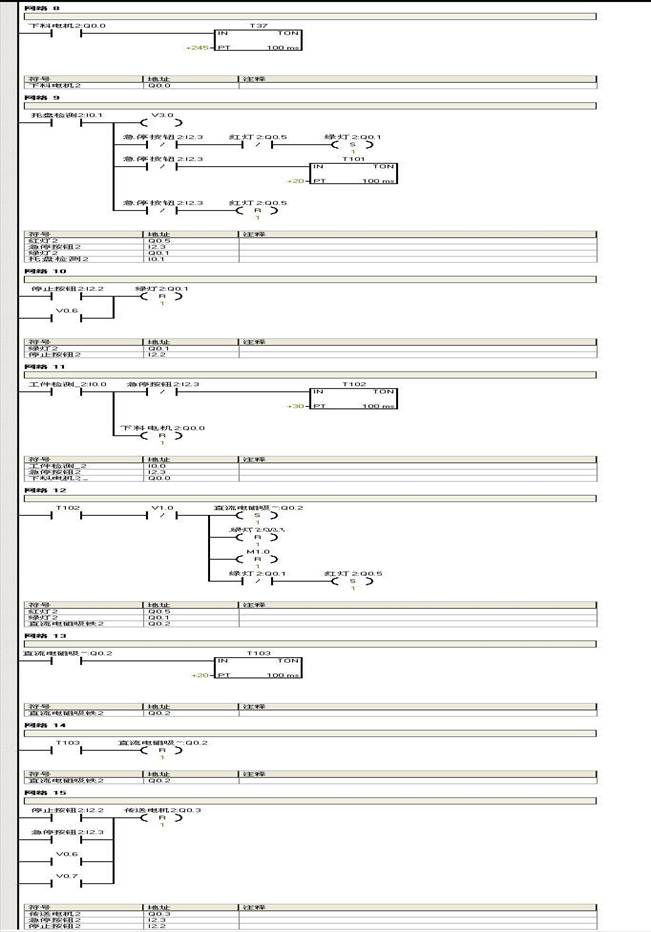
下料单元的软件图:
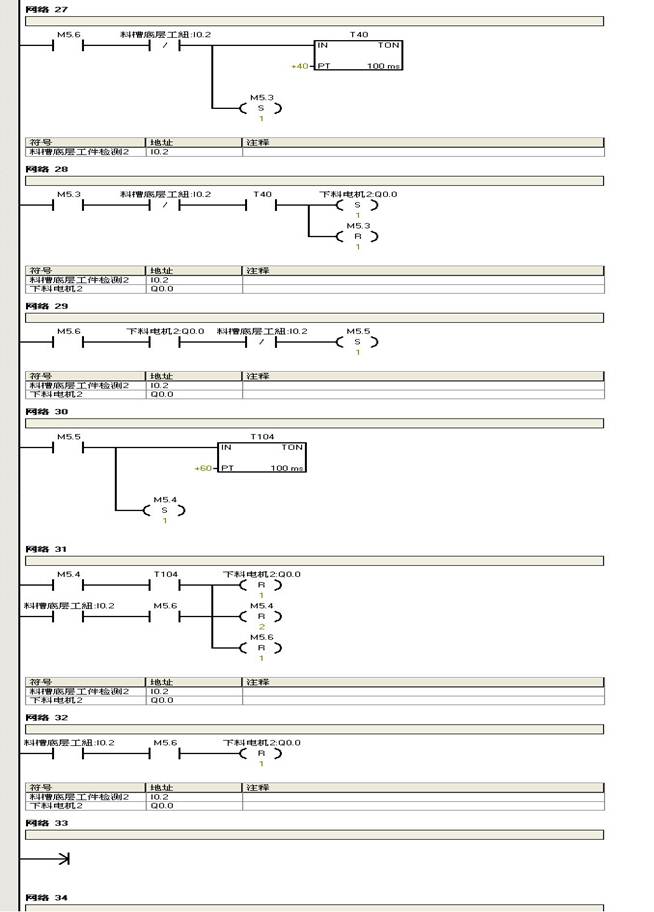
加盖的软件图:

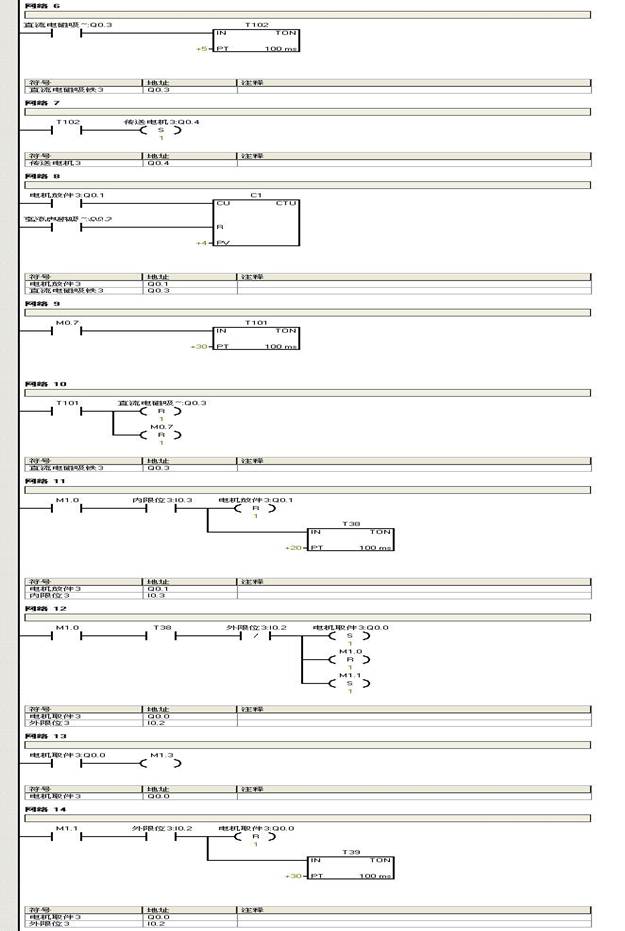


传销的软件图:
3、心得体会
通过这次的实践,我首先认识了这些系统的组成,以及其中相关的一些传感器的应用,这几种传感器如何相互协作组成一个比较完善的反馈通道及状态指示,并且理解了一个自控系统的好坏,并不是由其算法的复杂程度而决定,有时适合的比例算法就比完整的pid算法好,并且简单易用。对于自动化在工业上的应用也有了一个比较感性的认识,对于自动化的应用也有了个较具体的认识,由纸面的知识变为现场的体会和心得,整个过程对于硬件的认识,再加上对与软件的理解,让我对于自动化的软硬结合有了一定的认识,以及了解了,如何软硬结合。
第二篇:自动化专业实践报告
专业:姓名:学号: 实践论文 新宇电子公司调查报告 自动化 10.1 齐宝宁 201005125
摘 要
我来到了本溪市新宇电子设备有限公司实习了几天,本次寒假实践才得以圆满完成。本溪市新宇电子设备有限责任公司是以研制生产经营自动化设备、仪器仪表、输变电设备及各类变频电源设备为主的专业企业。我从中学到了很多知识,同时也把已经学到的知识应用到具体生产应用中。通过本次实践,我们对本专业未来就业前景有一个方向性的把握和认识。同时实践调查过程中很好的锻炼了自己,也证明了自己的能力,又学到一些课本上学不到的专业技能知识。企业位于辽宁省本溪市城区东部明山区卧龙镇,地处辽宁省工业区中心地带,毗邻沈本高速公路出入口,交通十分便利。企业拥有雄厚的技术力量和人才优势,与华中理工大学、中科院、北京大学、天津大学等建立了密切的技术合作关系,产学研联合使公司的技术日臻完善,始终紧跟时代步伐,先后研制生产了多种适应我国工业现代化需要的设备和仪表,并有五项产品填补了国内空白。
关键词
就业实习 学习实践 调研 电路板焊接 培训 交流 成果 喜悦
企业位于辽宁省本溪市城区东部明山区卧龙镇,地处辽宁省工业区中心地带,毗邻沈本高速公路出入口,交通十分便利。企业拥有雄厚的技术力量和人才优势,与华中理工大学、中科院、北京大学、天津大学等建立了密切的技术合作关系,产学研联合使公司的技术日臻完善,始终紧跟时代步伐,先后研制生产了多种适应我国工业现代化需要的设备和仪表,并有五项产品填补了国内空白。
新宇公司拥有雄厚的技术力量和人才优势,与华中理工大学、中科院、北京大学、天津大学建立了密切的技术合作关系,产学研联合使公司的技术日臻完善、始终紧跟时代步伐,先后研制生产了多种适应我国工业现代化需要的设备和仪表,并有五项填补了国内空白。
通过听取相关专业人士的宝贵意见,结合当前就业形势,在对问卷调查进行综合整合分析的基础上,根据我的意见,我将在充分尊重和征求新宇有限公司相关领导的意见和建议的基础上,结合大学生的实际情况,自主安排学习参观的具体内容,根据对学习地的了解,我对本次学习有如下暂时性的安排。
一、参与产品研发与生产一线,了解具体的产品生产与研发过程
经过新宇徐老师给我提供的指导后,借助公司的相关器材,我在新宇公司焊接电路板,电路板是之前徐老师展示的产品——锅炉自给水控制系统。这项工作主要锻炼我们的电路板焊接的能力。技术越是娴熟,效率越高。
有一定能力之后,在老师指导下我们设计了自己的小作品。因为寒假实践活动大家的时间有限,所以我们不能做太难的太复杂的东西。同时对于一个系统来说,我们应善于把不同的小系统整合成一个综合系统,能把一个大的综合系统分解成一个一个相对独立小系统,还要注重跨学科跨领域综合运用,要有创意,要有新意。
二、与该公司工作人员以及相关专业人士的互动,具体包括;
a、以问卷调查的方式了解学生、工人以及相关业内人士对该专业就业前景的看法。
b、以座谈会的形式仔细听取公司职员对自动化专业学生就业的看法和宝贵意见。
c、以座谈会的形式让新宇有限公司的领导谈谈在本专业领域内找到一份满
意的工作应该具备的基本素质和要求。
d、向专业人士请教在社会动态发展的今天如何权衡利弊找到一份满意的工作以及今后的就业走向(这其中关系到:到东部沿海还是北方比较落后的欠发达城市,是到大城市还是到中小城市,甚至深入到农村等。)
三、本次寒假社会实践活动主要是到具体生产线上做出实实在在的产品,需要具备相关的专业知识。专业知识主要涉及到数字电子技术,模拟电子技术,单片机,电工电子实训基础。但是单片机是大三下学期的课程,这无疑给本次实践带来一定的难度。
当然新的专业知识要学,但学过的东西也要复习,如数电,模电。涉及到具体做东西,手上功夫也要练,我每次去新宇公司都要练习电路板焊接。天气很冷,但是我觉得很有趣,也就无所谓了。
从家出发到新宇电子有限公司的自行车程大约30分钟,有很好的地理优势,省下了路费,保证了安全。
1月12日上午,我来到新宇电子有限公司,我拿到了工作注意事项以及工作制度表。同时徐老师总要求我们在公司焊接电路板半天,算是实习前预习。
1月13日,我学会了所有注意事项,这其中包括:
1、 焊接电路注意事项,安全隐患,防止触电,防止火灾等,很罗嗦,但很有必要。
2、 工作制度:要严格按照新宇电子员工上下班的制度来,但我们要
多一条“节假日(周六周日)不休息”。每天8点到公司,下午五点半下班,可以申请加班,但无加班费。
3、 新宇电子提供必要的茶水,午餐自行解决。
实习条件不是多么优越,但我依然兴致昂扬,徐老师很开心。
下午我准备好一些需要的资料还有记录实践活动要用的笔纸和相机后,等待明天的到来,整装待发!
1月14日,我去了新宇电子有限公司,进公司进行简短的介绍后直接进入正题。
先由老师对我进行简单的培训,主要涉及到基础知识的宏观概括,简单的硬件电力设计工作和软件编程技巧,软硬件的调试和基础仪器的使用方法。公司内部不乏这个专业领域的人才。新宇电子在市场主要从事产品研发与师生培训,员工大都是硕士,他们每一个人都能对我们进行培训。书本上拗口难懂的知识点从这些长期从事生产研发的人员口中说出来是那样形象,简单通俗易懂。
因为时间有限,所以培训只有一天,很简单,也很紧凑。很多东西需要大家细看,所以我只有每天晚上恶补,查质料,但我都在坚持!
简单的告别
2月15日,一路走来已经到了今天,最艰难的时刻已经过去,在我走之前还要对公司员工做一次问卷调查,用于后期的数据处理
实践总结
本次实践活动以就业见习与自动化专业就业前景专题调研为主题,目的是为了了解当今大学生就业难的严峻形势,增强自身专业知识,最终得以圆满完成。
这次实践活动会对我以后的生活、学习产生积极的影响,社会实践为我提供了一个很好的平台,我的动手能力,表达能力和知识运用扩展能力都得到了增强。同时也让我对自动化专业就业现状及前景有了更深的认识,我必须要更加努力学习,扩展知识面,提高自己各方面的素质,这样将来才能更好的在社会上立足发展。实践之后,我对自己所学专业有了更深的认识,对之后所学专业知识充满期待,也对自己的未来充满希望。