华中科技大学电子与信息工程系
硬件课设实验报告
项目名称:智能小车控制系统
班 级: 通信 #### 班
学 号: U20101####
姓 名:
指导老师: # # #
——2013.7.3
课题名称:智能小车自动控制系统
摘要:未来,随着FPGA 从可编程逻辑芯片升级为可编程系统级芯片,其在电路中的角色已经从最初的逻辑胶合延伸到数字信号处理、接口、高密度运算等广阔的范围, 应用领域也从通信延伸到消费电子、汽车电子、工业控制、医疗电子等更多领域。
Basys2 开发板是任何人都通过它的应用过程能够积累实际数字电路设计的经验的FPGA 电路设计应用平台,Basys2 开发板给主机电路提供完整、准备使用的硬件支持,以便从简单的逻辑电路实现复杂的控制。而且包含了许多I/O 接口和的完整的FPGA 支持电路,所以不需要任何其他组件也可以实现很多设计。
本设计基于竞赛组委会提供的BASYS2 技术平台,利用xilinx 公司FPGA 芯片实现了智能小车的控制等的功能。本系统以任务书的要求为目的,采用FPGA 逻辑门为控制核心,利用红外线传感器检测道路上的标志,自动沿着一定的轨迹运动。本设计还利用了超声波模块实时的检测前边的障碍物,并实现了臂章功能。
关键词: FPGA,红外线检测,电动小车
Design and create an intelligence electricity motive small car
Abstract:The Basys2 board is a circuit design and implementation platform that anyone can use to gain experience building real digital circuits,the Basys2 board provides complete,ready-to-use hardware suitable for hosting circuits ranging from basic logic devices to complex controllers.A large collection of on-board I/O devices and all required FPGA support circuits are included,so countless designs can be created without the need for any other components.
The plan is based on BASYS2 technology platform that the committee of competition team is supplied,use FPGA chip of Xillinx company to achieve the function of control intelligence smart car.
The system requirements of the mission statement for the purpose,FPGA circuit as control core,use infrared sensor to detect road mark,and automatically move along certain trajectory,and display moving speed.
Keywords:FPGA;Infrared detection;Electric smart car
目录
1.概述 …………………………………………………………………5
2.设计目标 ……………………………………………………………6
2.1 项目目的……………………………………………………………………6
2.2 项目描述……………………………………………………………………6
2.3 任务要求……………………………………………………………………6
2.4 任务分工……………………………………………………………………6
3.方案设计与论证 ……………………………………………………7
3.1 车体设计方案………………………………………………………………7
3.2 模块设计方案………………………………………………………………7
4. 系统设计与实现……………………………………………………9
4.1 循迹模块的设计……………………………………………………………9
4.2 电源模块的设计……………………………………………………………15
5. 实验问题与总结……………………………………………………16
5.1 问题………………………………………………………………………16
5.2 试验总结………………………………………………………………………18
1.概述
智能作为现代的新发明,是未来科技的发展方向,所谓智能,是指可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理的产品。可应用于科学勘探,危险情况下的无人操作等用途。此次课程设计所做的智能电动车就是其中的一个体现。
本次设计的简易智能小车能够工作在12v的移动电源下,实现了循迹、避障、寻光的一些基本功能。具体来讲,采用红外线发射—接收管检测黑线运动线路,使得能够在规定的时间内控制小车沿着黑色线显示的规定路径,准确地到达目的地,不能偏离轨道;如果不采用循迹轨道,小车在自由运动过程中能够避开障碍物;另外,使用光敏电阻设计寻光模块,使小车在较暗的环境里,能朝着有光源的地方行驶。本设计的主要控制由FPGA(BASYS2 提供FPGA芯片以及其外围电路,包括时钟、ROM、LED二极管、开关、按钮、7段显示器以及16个I/O口等)。设计中作为FPGA的开发环境利用了ISE开发软件,用VerilogHDL描述了FPGA的逻辑功能。
智能小车的电机为直流减速电机,器驱动电路模块主要使用L298,检测运动路线的红外线接收管和避障的超声波发生器装在小车的前面,寻光模块位于小车前部的上方,给控制模块提供路线的情况。除了电机以外的所有电路供5v的直流电压,具体实现可由7805稳压源来完成。
总之,本设计结构较简单,而且容易实现,一定程度上实现了智能化、自动化。
2.设计目标
2.1项目目的:
硬件课程设计是华中科技大学电子与信息工程系相关专业本科学生必修的实践性教学环节。硬件课程设计的目的在于使学生通过硬件课程设计教学环节较系统地完成电子系统设计从选题、方案论证、电路设计、电路实现、装配调试、系统测试、总结报告等基本过程,加深对模拟电路、数字逻辑电路、通信电子电路、微机原理等相关课程理论知识的分析理解。引导学生把原理分析与工程设计实现相结合,掌握实际电子与通信系统设计的基本方法和一般规则,提高综合应用所学理论知识的能力,培养学生的创新思维和实践能力,为后续专业课程的学习打下坚固的基础。
2.2项目描述:
本项目要求设计并实现一个智能小车自动控制系统,该小车能够根据外部传感器的输入信息,自动沿着一定的轨迹运动。
2.3任务要求:
2.3.1基本要求
(1)各个电路模块需自行设计完成,机械模块可以购买;
(2)能够利用红外线发射及接收对管检测黑白线;
(3)能够控制二驱小车自由运动;
(4)能够在规定的时间内控制小车沿着具有直线和弧线的轨迹运动到停止处,不能偏离轨道。
2.3.2发挥部分
(1)小车在离开运动轨迹后能够根据光源的指示,运动到光源处;
(2)若在运动线路中设置障碍物,小车能够避开障碍物,继续朝着光源前进;
(3)提高小车的运行速度;
(4)实时显示小车的运行速度。
2.4 任务分工
本团队有三个学生组成,分别是:通信****班 U2010***** ##,通信####班 U201##### ####,通信1###班 U20201#### ##
任务分工如下:
##:主要负责FPGA芯片的逻辑功能描述(VerilogHDL软件的设计)、自动寻光模块的设计。
##:电机驱动模块以及超声波装置等硬件装置的设计、制作以及调试。
###:红外线检测装置的设计,以及系统的主要模块的制作及调试。
3.方案设计与论证
3.1 车体设计方案
方案一:
采用后轮直流电机驱动+前轮舵机转向的方式,这种小车的优点在于可以获得很大的速度,由于转向采用的是舵机,所以缺点就在于要想转弯一定要有一定的转角。
方案二:
采用的是采用直流电机+万向轮的方式,这类的小车的优点在于转弯不需要转角,可以原地转弯,其次是可以精确控制小车行进路线,缺点是无法获得很大是速度。
考虑到小车行驶空间有限,方案一转弯存在一定困难,所以选择方案二。
3.2 模块设计方案
根据设计任务基本的要求,并且根据我们自己的需要而决定附加的功能,该电路的总体框图可分为如下几个基本的模块,框图如下所示:

由于这次我主要负责的是电源部分和红外检测部分,所以下面主要分析一下我设计这两模块时的思路。
3.2.1循迹模块
方案一:
采用简易光电传感器结合外围电路探测,但实际效果并不理想,对行驶过程中的稳定性要求很高,且误测几率较大、易受光线环境和路面介质影响。在使用过程极易出现问题,而且容易因为 该部件造成整个系统的不稳定。故最终未采用该方案。
方案二:
采用红外对管(ST188),置于小车车身前底部,根据光电开关接受到白线与黑线的情况来控制小车转向来调整车向,测试表明,只要合理安装好光电开关的位置就可以很好的实现循迹的功能。
通过比较,我选取第二种方案来实现循迹。
3.2.2电源模块
方案一:
采用实验室有线电源通过稳压芯片供电,其优点是可稳定的提供5V电压,但占用资源过大。
方案二:
采用4支1.5V电池单电源供电,通过连线使7805输出端输出5V电压,1.5A电流但6V的电压太小不能同时给单片机与与电机供电。
方案三:
采用8支1.5V电池双电源分别给单片机与电机供电可解决方案二的问题且能让小车完成其功能。
所以,我选择了方案三来实现供电。
4.系统的设计与实现
4.1 循迹模块的设计
4.1.1综述
 探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可根据接收到的反射光强弱来判断黑线。 本模块主要选用ST188做红外线传感器, ST188是一个四端口元件,包括了一只红外发射管和红外接收管,用塑料外壳将对管封装起来,实物图如左。
探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可根据接收到的反射光强弱来判断黑线。 本模块主要选用ST188做红外线传感器, ST188是一个四端口元件,包括了一只红外发射管和红外接收管,用塑料外壳将对管封装起来,实物图如左。
其中,A-K为红外发射管, C_E为红外接收管。它的检测距离可调整范围大,4mm~13mm。采用高发射功率红外光电二极管和高灵敏度光晶体管组成,采用非接触检测方法。本传感器可以满足系统设计要求中的循迹功能的要求。
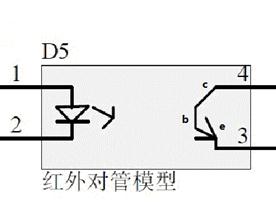 ST188内部简化模型如左图所示。当没有物体反射红外线时,ce之间截止,无电流流过,输出电压为电源电压,高电平。当有物体反射红外线时,be饱和导通ce也就导通了,输出端就相当于接地。输出电压为低电平。
ST188内部简化模型如左图所示。当没有物体反射红外线时,ce之间截止,无电流流过,输出电压为电源电压,高电平。当有物体反射红外线时,be饱和导通ce也就导通了,输出端就相当于接地。输出电压为低电平。
除此之外,由于此电路在检测过程中会出现较大的死区电压,故我们可以适当的加上电压比较器做辅助电路,于此同时,也可以通过调节比较电压的大小改变ST188的测量灵敏度。
比较器有各种不同的类型。对它的要求是:鉴别要准确,反应要灵敏,动作要迅速,抗干扰能力要强,还应有一定的保护措施,以防止因过电压或过电流而造成器件损坏。
比较器有如下的特点:
⑴ 工作在开环或正反馈状态。放大、运算电路为了实现性能稳定并满足一定的精度要求,这些电路中的运放均引入了深度负反馈;而为了提高比较器的反应速度和灵敏度,它所采用的运放不但没有引入负反馈,有时甚至还加正反馈。因此比较器的性能分析方法与放大、运算电路是不同的。
⑵ 非线性。由于比较器中运放处于开环或正反馈状态,它的两个输入端之间的电位差与开环电压放大倍数的乘积通常超过最大输出电压,使其内部某些管子进入饱和区或截止区,因此在绝大多数情况下输出与输入不成线性关系,即在放大、运算等电路中常用的计算方法对于比较器不再适用。
⑶ 开关特性。比较器的输出通常只有高电平和低电平两种稳定状态,因此它相当与一个受输入信号控制的开关,当输入电压经过阈值时开关动作,使输出从一个电平跳变到另一个电平。由于比较器的输入信号是模拟量,而它的输出电平是离散的,因此电压比较器可作为模拟电路与数字电路之间的过渡电路。
由于比较器的上述特点,在分析时既不能象对待放大电路那样去计算放大倍数,也不能象分析运算电路那样去求解输出与输入的函数关系,而应当着重抓住比较器的输出从一个电平跳变到另一个电平的临界条件所对应的输入电压值(阈值)来分析输入量与输出量之间的关系。
如果在比较器的输入端加理想阶跃信号,那么在理想情况下比较器的输出也应当是理想的阶跃电压,而且没有延迟。但实际集成运放的最大转换速率总是有限的,因此比较器输出电压的跳变不可能是理想的阶跃信号。电压比较器的输出从低电平变为高电平所须的时间称为响应时间。响应时间越短,响应速度越快。
减小比较器响应时间的主要方法有:
(1) 尽可能使输入信号接近理想情况,使它在阈值附近的变化接近理想阶跃且幅度足够大。
(2) 选用集成电压比较器。
本模块主要采用LM234电压比较器。通过它进行反射光强度的测量,将测量的结果发送控制模块判断路面的情况。
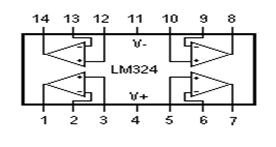 LM324是四运放集成电路,它采用14脚双列直插塑料封装,引脚排列如左图所示。它的内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
LM324是四运放集成电路,它采用14脚双列直插塑料封装,引脚排列如左图所示。它的内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
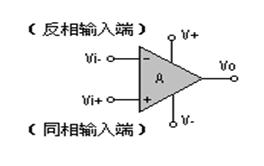
每一组运算放大器可用左图所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“V+”、“V-”为正、负电源端,“Vo”为输出端。两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号与该输入端的相位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。
电压比较器可以看作是放大倍数接近“无穷大”的运算放大器。当去掉运放的反馈电阻时,或者说反馈电阻趋于无穷大时(即开环状态),理论上认为运放的开环放大倍数也为无穷大(实际上是很大,如LM324运放开环放大倍数为100dB,既10万倍)。此时运放便形成一个电压比较器,其输出如不是高电平(V+),就是低电平(V-或接地)。当正输入端电压高于负输入端电压时,运放输出低电平。当正输入端电压低于负输入端电压时,运放输出高电平。
4.1.2实际电路设计
ST188的供电电压为3.0V~5.0V。BASYS2开发板的支持供电电压为3.3V。因而可以直接利用BASYS2开发板的供电电源来为ST188供电。LM324的供电电压为5.0V,也采用BASYS2开发板的供电电源。
进一步查阅ST188手册了解到,流过发光二极管的电流(A_K电流)最大不能超过50mA。根据这些特性,选取发射管的静态电流为20mA。典型的压降为1.25v,如果供电电压为5V,那么,此时在发射管上需要串联电阻,电阻大小为R=(5-1.25)/0.02;即:R=187.5欧姆。取标称电阻,R=200,那么此时的电流小于20mA,但是不影响结果。C_E端的电阻比较灵活,毕竟他是用来输出高低电平的,在此我们接一个2K的电阻,其实上面电路图中的活动变阻器没有必要,只是为了测试方便,调整阈值电压用的。
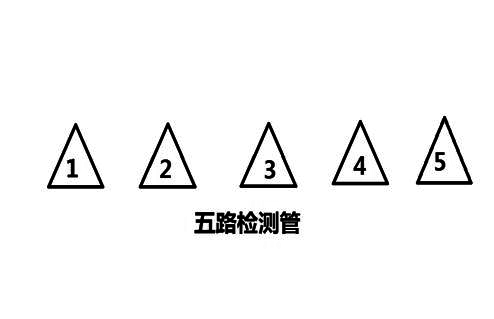
智能小车循迹通常有2路,3路,5路循迹,3路循迹相比2路循迹可提高小车的行进速度,5路循迹进一步提高小车巡线的可靠性。我们小组采用五路循迹以加强小车性能。
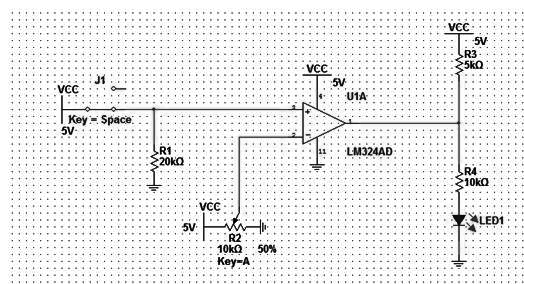
经过计算,设计单个红外传感器电路如下图所示。由于下载的multisim仿真软件中找不到ST188元件,故用高低电平替代ST188进行模拟仿真。
分析电路图,其中R1和接收管构成分压电路,和接收管电压有关,这里取20k;R2是10k的电位器,为比较器提供参考电压;R4是上拉电阻,影响输出端高点位值,一般取5—10k,这里取5k;R4和发光二极管构成检测电路。
4.1.3实际调试和电路修改
我们小组按照仿真,现在面包板上搭了简单的电路进行测试。搭好之后发现以下问题:
A.无论ST188对着黑线还是白线,发光二极管都会发光;
B.在距离地面高度20cm左右,发光二极管还是能发光;
经过分析,猜测可能是ST188发射功率过大,导致即使黑线也会有足够的反射光被接收管接收到,发射功率过大也会导致反应高度过高,不便于组装。经过反复调试,最终选择R为510欧电阻。
除此之外,测试发现上拉电阻R3存在与否对实验结果影响并不显著,为了节省时间和减少焊接的复杂度,我们选择去掉上拉电阻R3。
4.1.4循迹策略
本系统共设计五个红外传感检测电路,分别在小车车头的中间放置一个 ,左、右两个方向各放置2个,采用了四路轨迹检测,用来控制电动车的行走方向。
当3号光电管检测黑线时,控制直行;当2号光电管或3和2号光电管都检测黑线时,控制转向电机向左转;当4号光电管或3和4号光黑线时,应该控制转向电机向左急转;当4和5号光电管都检测黑线时,控制转向电机向右急转。
此套红外光电传感器固定在底盘前沿,贴近地面。正常行驶时,发射管发射红外光照射地面,光线经白纸反射后被接收管接收,输出低电平信号;电动车经过黑线时,发射端发射的光线被黑线吸收,接收端接收不到反射光线,传感器输出高电平信号后送控制模块处理,判断执行哪一种预先编制的程序来控制小车车的行驶状态。
前进时,驱动轮直流电机正转,进入减速区时,由FPGA控制进行PWM变频调速,通过软件改变脉冲调宽波形的占空比,实现调速。(具体代码见附录)
4.2.电源模块的设计
4.2.1综述
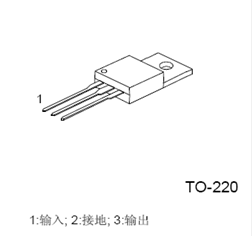 因为驱动电机需要比较大的电压电流,5V的一般电压无法满足电机的快速转动,所以电源采用12v的移动电源。我们小组采用八节1.5v的5号电池串联,电池安装在小车底盘的中间。电源输出的12v电压需要供给5V电路模块,如超声波、BASYS版等,所以需要采用7805三端稳压电路。7805三端正电源稳压电路的封装形式为TO-220,如右所示。由于内部电流的限制,以及过热保护和安全工作区的保护,使它基本上不会损坏,应用非常广泛。
因为驱动电机需要比较大的电压电流,5V的一般电压无法满足电机的快速转动,所以电源采用12v的移动电源。我们小组采用八节1.5v的5号电池串联,电池安装在小车底盘的中间。电源输出的12v电压需要供给5V电路模块,如超声波、BASYS版等,所以需要采用7805三端稳压电路。7805三端正电源稳压电路的封装形式为TO-220,如右所示。由于内部电流的限制,以及过热保护和安全工作区的保护,使它基本上不会损坏,应用非常广泛。
7805的输出范围为4.8V ~ 5.2V,输出电流为5mA。线性调整率为4mV;1脚为输入电压(本设计中12V),2脚接地,3脚为输出电压(5V)。7805具有热过载保护,短路保护,输出晶体管安全工作区保护等的特点,其5v的输出电压直接供给到BASYS版和其他逻辑电路上。
4.2.2实际电路设计
根据7805的引脚图,可以设计如下电路图:
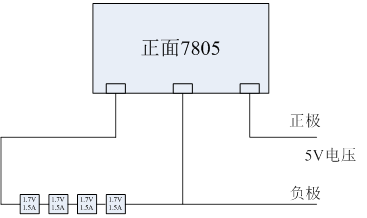 由四节干电池供电,构成输出为5V的稳压电源。
由四节干电池供电,构成输出为5V的稳压电源。
5.问题与总结
5.1问题
实验做完,虽然基本完成了任务要求,但是期间遇到的大大小小的问题总结起来也未免不是一笔财富:一方面作为一种回顾,使自己对本次课程设计有个更深刻的认识;另一方面,也为以后类似的项目积累宝贵的经验。
具体说来,问题主要体现在以下几个方面:
(1)对小车结构没有一个整体的规划。直观来说,凌乱的布局严重影响到了小车的美观;更重要的是欠考虑的布局对小车的整体性能影响很大。拿我们这次来说,循迹模块的安装过于靠前,导致小车重心前倾,使小车显得不太稳定。所以对于循迹模块的安装,伸出车体的长短都有讲究,在布局时要有所考虑。其次是电池的放置,由于电池较重,电池的放置直接影响到小车的重心,特别是在速度方面对电池安装的位置考虑尤显重要。
(2)在设计传感器的排列时没有考虑到传感器之间的距离,使两传感器距离过大,有时候检测不到黑线,但是排列过于密集,检测范围又很小,所以我们要动手之前在检测范围和检测精度之间取一个平衡。
(3)对于传感器的安装忽略了传感器的高度的估计,而凭感觉直接焊制模块,导致循迹模块工作不稳定。正常情况下,安装完成后离地面的高度大概在2cm 左右,高度越高,对于每个传感器来说红外光能够照射到的范围也就越大,但是由于每个红外发射管的功率有限,接收到的也就越少,可能会影响接收的效果。因此需要根据发射管的功率和实际型号调整到一个合适的值。
(4)焊制板子的时候,由于不熟练导致的虚焊、漏焊等众多问题。这类问题检查和修改起来都很麻烦和耗时间。所以尽量做到细心,一次过。焊板子过多的问题容易导致积极性降低,影响实验效率。
5.2实验总结
本学期的硬件课设我们小组选择了制作智能小车这样一个课题。前前后后这么久,一言以蔽之,痛并快乐着。在感受团队效应的同时,一步步的离目标越来越近,同事也很好的调动了自己平时学的知识,让理论有了实践的点缀。
制作初期,我们发现其他同学的小车构架新颖,机械结构很有层次,我们积极改进,吸取别人的优点,反复之下,我们的小车终于定形了。正式调试的时候我们的车的循迹电路并不是那么灵敏,总有一个传感器不听话,通过仔细调节电位器终于它的反应正常了。接下来我们焊接了避障电路,由于电源电压不够,距离问题不得不反复推敲,所以在这里我们停滞了很久。在程序编写方面,张硕同学一夫当关,下了不少功夫,后面的阶段都是围绕他的程序进行的,终于我们的小车达到了验收标准,成功验收。
从刚开始对智能小车懵懵懂懂,到现在欣赏着自己的作品生龙活虎,我很享受这样一步步成长和成功的过程。这些经历告诉我们成功的魅力,让我们在经后的大学生活乃至以后的工作生活中,为一次次的成功努力奋斗。