《机械原理》课程设计
计算说明书
设计题目:健身球检验分类机
班 级:
姓 名:
学 号:
指导老师:
健身球检验分类机构设计
一、设计要求
(一)计健身球自动检验分类机,将不同直径尺寸的健身球(石料)按直径分类。检测后送入各自指定位置,整个工作过程(包括进料、送料、检测、接料)自动完成。
健身球直径范围为ф40~ф46mm,要求分类机将健身球按直径的大小分为ф40≤第一类≤ф42、ф42<第二类≤ф44、ф44<第三类≤ф46三类。
其他技术要求见表1:
表一:健身球检验分类机的设计数据

(二)设计任务
1.健身球检验分类机一般至少包括凸轮机构,齿轮机构在内的三种机构。
2.设计传动系统并确定其传动比分配。
3.图纸上画出健身球检验分类机的机构运动方案简图。
4.编写设计计算说明书。
下表设计任务分配表

(三)设计提示
健身球自动检验分类机是创造性较强的一个题目,可以有多种运动方案实现。一般的思路在于:
球的尺寸控制可以靠三个不同直径的接料口实现。例如:第一个接料口直径为42mm,中间接料口直径为44mm,而第三个接料口直径稍大于46mm。使直径小于(等于)42mm的球直接落入第一个接料口,直径大于42mm的球先卡在第一个接料口,然后由送料机构将其推出滚向中间接料口。以此类推。
(四)功能分解
为完成健身球分类过程,需实现下列运动功能要求:
1.进料是一个往复运动过程,因此需要设计相应的送料机构。
2.要将球按直径大小分类,就必须抓住直径不同这一特点设计一个筛选机构。
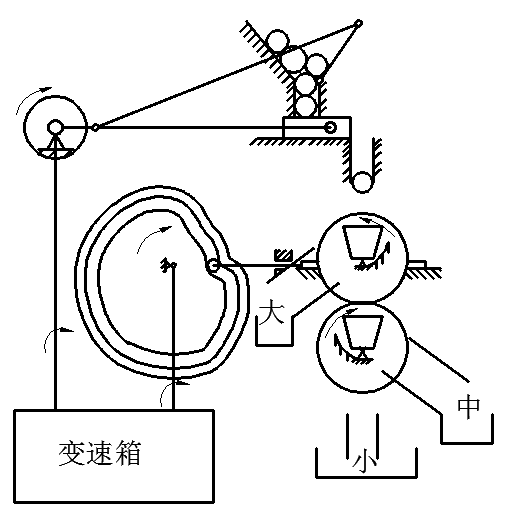
二、机构运动方案
三、主要机构的设计
1.送料机构
机构示意图如下:
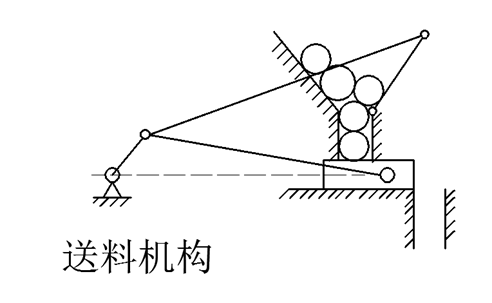
说明:送料机构由曲柄滑块和曲柄摇杆组成:曲柄滑块在往复运动过程中,回程中滑块末端恰好到达漏斗左边,漏斗中的球将落下一颗。在去程中,机构将球推入筛选机构中,且滑块右端不超出漏斗左端,将漏斗封闭以免下落小球阻碍回程运动;曲柄摇杆在这里起到震动的作用,减少健身球不能顺利下落的概率。整个周期为3s,由变速箱提供动力。
2.筛选机构
方案1 机构示意图如下:
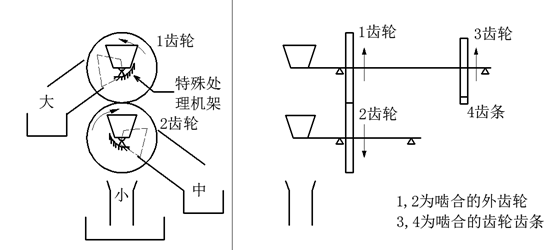
说明:筛选机构的容纳杯由上往下直径分别为44、42、40,根据小球能通过而大球不能通过的原理,直径为44~46的将停留在第一个容纳杯处,而直径为42~44的将停留在第二个容纳杯处,直径为40~42的顺利通过。停留的球将利用外啮合齿轮转向相反翻转滚入不同收集容器以此来完成对所有球的检验和分离,容纳杯设计成漏斗状利于收集、分离。机架如图设计,以至于在翻转时受其作用力从杯中推出避免卡死现象发生。
 方案2
方案2


3.传动方案
A.凸轮

说明:因为筛选机构不需要很大的动力,所以此处选用凸轮机构为筛选机构的动力直接来源,凸轮带动齿条4实现往复、间歇、急回运动,使得齿轮1、2各自反向转过一定角度并有间歇、急回。由变速箱为凸轮提供动力。
B.变速箱
选用电机转速=720r/min 生产率=20/min

皮带传动 i= 2
第一级:直齿圆柱齿轮传动 i=-2
第二级:直齿圆柱齿轮传动 i=-3
第三级:直齿圆柱齿轮传动 i=-3
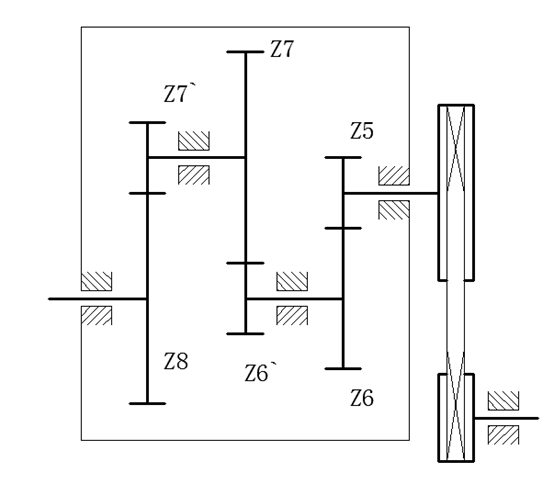
注:为避免齿轮因为尺寸原因发生小齿轮易破损的现象采用三级变速,以此保证齿轮寿命最大、磨损基本相同。
四、尺寸设计
1.齿轮 单位:mm
齿轮1、2:
Z=24 m=4 ɑ=20° ha*=1 c*=0.25 B=10
分度圆直径d=mz=96 基圆直径=dcosɑ=90.21
齿根圆直径=m(z-2ha*-2c*)=86 齿顶圆直径=m(z+2ha*)=104
齿轮3:
Z=14 m=4 ɑ=20° ha*=1 c*=0.25 B=10
齿条4:
Z=12 m=4 ɑ=20° B=10
其他齿轮:

2.凸轮(几何封闭的沟槽凸轮)
运动线图:(根据下表,描点绘制)

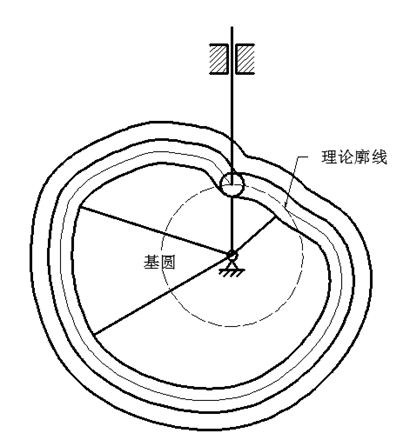
说明:几何封闭沟槽凸轮。利用反转法,将推程和回程分别分为6份,分别计算出h(见下表),用样条曲线顺次连接绘制而成。
基圆半径=70mm
最大推程h=14×4×3.14×6/14=75.36mm (注:齿轮3实际啮合6个齿,齿轮1、2大致翻转155°)

推程:

回程:

五、方案评价
运动精确性:由于齿轮设计和曲柄滑块设计都是按照检球速度20个/分来设计,因此凸轮、曲柄滑块的转动速度都是20转/分,以此来确保送料机构和筛选机构的同步。
运动平稳性:从电机到减速器采用带传动,齿轮的尺寸适中且工作速度适中,其次凸轮采用摆线运动规律,没有刚性和柔性冲击,因此传动比较平稳。
结构紧凑性:通过一个电动机实现送料机构、筛选机构的工艺动作,且外形尺寸比较合理,结构较紧凑。健身球不会被卡死而影响整体运转
六、设计总结
机械原理课程设计是机械设计制造及其自动化专业教学活动中不可或缺的一个重要环节。通过课程设计使我从各个方面都受到了机械设计的训练,对机械的有关各个零部件有机的结合在一起有深刻的认识。
此次我组机械原理课程设计所选的题目是一个创造性较强的课题,考察的知识点也很全面,有凸轮设计,还有齿轮设计选择及电动机的选择、变速等,还需要CAD制图。首先,我们从网上、图书馆找到类似的设计打开思路,积极讨论,最终确定最优的方案。这培养了我综合应用大学2年里所学的理论知识和生产实际知识解决工程实际问题的能力,还培养出了我们的团队合作精神。全体组员共同探讨,解决了许多个人无法解决的问题。同时,我深刻地认识到了自己在知识的理解和应用方面的不足。由于在设计方面我们没有经验,理论知识学的不牢固,在设计中难免会出现这样那样的问题,很多地方还有不足,有待改进。今后的学习过程中,我会更加认真努力学习!
总之,我认为我们组出色圆满的完成了任务,大家合作的还是很愉快,指导老师也给予很大的帮助。最重要的是,让我明白我还有好多东西要学习,要不断积累,同时也坚定了自己做一个优秀的工程师信念!
七、参考资料
1.机械原理 主编 孙恒 陈作模 葛文杰 高等教育出版社
第二篇:机械原理课程设计指导书
机械原理
课程设计指导书
南昌大学
机械设计及理论教研室
前言
本指导书是总结最近几届机械原理课程设计教学工作的基础上编写的。目的在于指导学生在设计中根据给定的机器工艺、功能,正确进行机械运动简图的型综合及尺度综合,进一步提高学生机械运动简图设计能力,培养学生的分析和综合能力,培养学生创新能力。设计内容基本覆盖了主要教学内容。
机械原理课程设计是机械原理教学工作的一个重要环节,是工科机械类学生入学后第一次接触到的大型综合设计,设计时间紧,内容多。从教学角度出发,既需要活跃学生思维,又必须保证设计工作有序进行,这也是编写本指导书的另一目的。
为了进一步完善机械原理课程设计教学工作,殷切希望参加设计的学生通过设计提出宝贵的改进意见。
机械设计及理论教研室
20##年12月
一、机械原理课程设计的目的
1.学会机械运动简图设计的步骤和方法。
2.巩固所学的理论知识,掌握机构分析与综合的基本方法。
3.培养学生使用技术资料,计算作图及分析与综合的能力。
4.培养学生进行机械创新设计的能力。
二、设计内容
小平面刨削机运动简图设计及分析
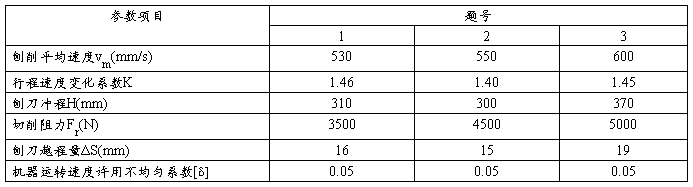
三、机器的工艺功能要求和原始参数
1.刨削速度尽可能为匀速,并要求刨刀有急回特性。
2.刨削时工件静止不动,刨刀空回程后期工件作横向进给,且每次横向进给量要求相同,横向进给量很小并可随工件的不同可调。
3.工件加工面被抛去一层之后,刨刀能沿垂直工件加工面方向下移一个切削深度,然后工件能方便地作反方向间歇横向进给,且每次进给量仍然要求相同。
4.原动机采用电动机。
四、机器的工艺动作分解及要求
根据机器的工艺功能要求,其工艺动作分解如下:
1. 刨刀的切削运动:往复移动,近似匀速,具有急回特性。
2.工件的横向进给运动:间歇移动,每次移动量相同,在刨刀空回程后期完成移动,要求移动量小且调整容易。工件刨去一层之后能方便地作反向间歇横向移动进给,同样要求反向进给量每次相同且易调整。
3.刨刀的垂直进给运动:间歇移动,工件刨去一层之后刨刀下移一次,移动量调整方便。
五、拟定运动循环图
考虑到刨刀的垂直进给运动周期相对较长,而且一个周期中的运动时间比静止时间短得多,为了简化机构设计,此运动可以采用手动,所有该设计只要求拟定刨刀切削运动执行机构和工件横向进给运动执行机构之间的顺序和协调配合关系。
六、执行机构的选型
该机器的三个工艺动作采用三个执行机构来完成。
1. 刨刀切削运动
按照原始条件,原动机采用电动机,电机转子的回转运动经过减速传动装置后再传给刨刀切削运动的执行机构,所以它应具备将回转运动转换成双向移动的功能,常用于实现这一功能的执行机构有以下几种:
1)、移动从动件凸轮机构:易实现工作行程为匀速及具有急回特性的要求,但受力差,易磨损,行程大时基圆大,凸轮尺寸大,较难平衡和制造。
2)、平面连杆机构:受力好,磨损小,工作可靠,且具有急回特性,但只能实现近似均速运动。
3)、齿条机构:可实现工作行程为匀速移动的要求,但行程开始及终止时有冲击,适用于大行程而不宜小行程,且必须增加换向变速机构才能得到急回运动。
4)、螺旋机构:能得到均速移动的工作行程,且为面接触,受力好,但行程开始和终止时有冲击,安装和润滑较困难,且必须增设换向和变速机构,才能得到急回运动。
5)、组合机构:如凸轮——连杆组合机构,能实现给定的运动要求,但具有凸轮机构存在的缺点,且设计制造较复杂。
2.工件横向进给运动
工件的横向进给运动量是很小的,且每次要求等量进给,又因为必须防止工件在刨削力的作用下沿横向移动,所以横向进给执行机构除了能实现小而且等量进给外,在非进给时还应具备有自动固定的功能。螺旋机构能满足这些功能,而且结构简单,容易制造。因此,可选用螺旋机构作为横向进给运动的执行机构,其动力仍然来自驱动刨刀运动的电动机,不必另设动力源。
工件要能间歇移动,螺旋必须作间歇转动,所以在螺旋机构之前必须串联一个间歇转动机构,且与刨刀切削运动执行机构相联,这样可以方便实现切削运动和横向进给运动的协调配合。能够实现将连续回转运动转化成间歇转动的机构有:
1)槽轮机构:结构简单,制造容易,工作可靠,但每次转角较大且不可调整,为了反向回转,必须增加反向机构。
2)曲柄摇杆棘轮机构:结构简单,制造容易,每次转角较小,容易调整且为等量转动,采用双向式棘轮还可以方便地实现棘轮反转。
3)不完全齿轮机构:可以实现等速转位和等量转角,但不可调整,如需反转必须增加反向机构。
4)凸轮式间歇运动机构:传动平稳,噪音低,适用于高速场合,但凸轮加工复杂,精度要求高,每次转角不可调,如需反转应增设反向机构。
5)星轮机构:具有槽轮机构的启动性能,又兼有不完全齿轮机构等速转位的优点,可以实现等量转角,但不可调,同时星轮加工制造困难。
3.刨刀垂直进给运动
为了实现刨刀的垂直进给运动,可以在刨刀切削运动执行件上设置一个在垂直于刨削方向上能作间歇移动的执行机构。与横向进给类似,该执行机构同样应具有小进给量可调且在非进给时具有自动固定的功能,同时考虑到动力源可以采用手动,因此采用一个简单螺旋机构作为刨刀垂直进给运动的执行机构,既简单又工作可靠。
七、运动方案的确定
如上所述可知,能实现机器总体工艺功能的方案有许许多多,通过分析比较确定实现该机器的三个工艺动作的执行机构分别为:
1.刨刀切削运动采用平面连杆机构。
2.工件横向进给运动采用曲柄摇杆棘轮机构与螺旋机构串联。
3.刨刀垂直进给运动采用螺旋机构。
为了实现刨刀切削速度尽可能为匀速,作为刨刀切削运动的执行机构――平面连杆机构,建议采用平面六杆机构并绘制多种机构示意图,本次设计要求不少于三种。考虑到设计内容多,时间短,为减少重复工作量,只要求任选两种进行尺度综合及运动特性评定,并确定最终方案。
八、刨刀切削运动机构的尺度综合及运动特性评定
1.原动件曲柄AB的转速n1(r/min)
刨刀工作行程的刨削平均速度 ,极位夹角
,极位夹角 ,曲柄AB角速度
,曲柄AB角速度 ,代入整理得
,代入整理得 。
。
2.针对选定的两种平面六杆机构示意图,根据执行构件和原动件的运动参数进行机构尺度综合,即确定各构件的运动尺寸。
3.因为要求速度波动越小越好,所以可以按照速度均方根偏差最小的条件对初步选定的两种平面六杆机构进行运动特性比较,然后选取速度均方根偏差较小者为刨刀切削运动执行机构。
速度均方根偏差 ,式中n为对应于刨刀切削工作段曲柄AB转角范围所取的计算点数,vi为对应点刨刀的实际速度,vm为刨刀的切削平均速度。
,式中n为对应于刨刀切削工作段曲柄AB转角范围所取的计算点数,vi为对应点刨刀的实际速度,vm为刨刀的切削平均速度。
九、确定电机功率Pd与选型
1.取曲柄AB为等效构件,根据机构位置和切削阻力Fr确定一个运动循环中的等效阻力矩Mr(φ)。
2.根据Mr(φ)值,采用数值积分中的梯形法,计算曲柄处于各个位置时Mr(φ)的功 。因为驱动力矩可视为常数,所以按照
。因为驱动力矩可视为常数,所以按照 确定等效驱动力矩Md。
确定等效驱动力矩Md。
3.将曲柄位置号(或转角φ)和对应的Mr(φ)值列成表格。
4.由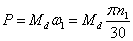 计算刨刀切削运动所需的功率,考虑到机械摩擦损失及工件横向进给运动所需功率,按照Pd=1.2P确定电机功率,并选定电机型号。
计算刨刀切削运动所需的功率,考虑到机械摩擦损失及工件横向进给运动所需功率,按照Pd=1.2P确定电机功率,并选定电机型号。
十、计算电机轴与执行机构原动件的速比i和选定减速机构
电机轴转速nd比执行机构原动件(曲柄AB)的转速n1大得多,其比值 ,所以其间必须配置减速机构,可以根据i值选定减速机构的类型及其速比。减速机构传动比常用比值如下:
,所以其间必须配置减速机构,可以根据i值选定减速机构的类型及其速比。减速机构传动比常用比值如下:
十一、估算飞轮转动惯量
步骤如下:
1.由M(φ)=Md-M(φ)确定等效力矩M(φ)。
2.根据M(φ)的值采用数值积分中的梯形法,计算一个运动循环中曲柄处于计算位置时等效力矩M(φ)的功ΔW(φ)。
3.将曲柄位置号和对应的M(φ)及ΔW(φ)值列成表格。
4.由[W]=ΔWmax-ΔWmin求出最大赢亏功[W]。
5.求电机转子及减速机构各构件的等效转动惯量Jc。
6.设飞轮安装在等效构件同一轴上,按照 计算飞轮转动惯量JF。
计算飞轮转动惯量JF。
十二、绘制机械运动简图
根据上述最后确定的机械运动方案绘制出机械运动简图,其中包括驱动电机、减速机构和三个执行机构。
十三、编写设计说明书
内容:
1.目录:包含标题和页次。
2.设计题目:包含机器工艺功能要求和原始参数。
3.机器运动方案简图初步拟定:包含1)、机器工艺动作分解及要求。2)、机器运动循环图。3)、三个执行机构的选型,要求先绘出示意图,再作文字叙述并作出结论。
4.刨刀切削运动机构的尺度综合及运动特性评定:要求包含除作图外的所有计算工作量。包括1)、机构运动尺寸计算。2)原动件转速n1的计算。3)速度均方根偏差计算等。为了醒目,可以先列计算式,计算结果采用表格形式表示,最后作出评定结论。
5.电机功率与型号的确定:包含1)、等效阻力矩Mr(φ)求值。2)等效驱动力矩Md求值。3)、电机功率Pd计算。Mr(φ)及其积分值Mr(φ)可以用列表形式列出。
6.飞轮转动惯量的估算:包含求飞轮转动惯量的各个步骤。其中M(φ)及ΔW(φ)值可以用列表形式给出。
7.减速机构的选定:包含减速比i,减速机构的类型及其传动比值的确定。
8.机械运动简图的最终确定及绘制。
9.参考资料:包括序号、编著者、资料名、出版单位、出版年月。
10.设计心得与意见。
要求
1.设计说明书采用统一的设计说明书用纸,用钢笔撰写。
2.要求说明书有大小标题,条理清楚,叙述简要明确,文句通顺,字迹端正。
3.说明书中的图样应准确、整洁,运动副及构件按规定符号绘制,表格应匀称醒目。
4.引用公式和数据应注明出处(参考资料序号及页次),使用的符号与脚注必须前后一致。
5.说明书应有封面、逐页编号,装订成册。
十四、图纸标题栏格式
十五、参考文献
[1]邹慧君,机械设计原理,上海交通大学出版社,1995.7
[2]郑文纬、吴克坚,机械原理(第七版),高等教育出版社,2002.6