
����ѧԺ
�����϶��γ�ʵ�����
�� Ŀ �����첽�綯�����������

 ѧ������
ѧ������
 ѧ ��
ѧ ��
ѧ Ժ
ר ҵ

ָ����ʦ
���� �� �� ��
�����첽�綯�����������
XX
�Ͼ���Ϣ���̴�ѧ����ѧԺ�Զ�����ϵ���Ͼ� 210044
ժҪ�����´��������о��������첽�綯�����������������ϵͳ����ƣ������������첽�綯���ڹ���ʱ�����˵綯���϶�������е�����㹻�������ת�أ���֤��������е��������������ƽ�����豸��ȫ�ɿ����ṹ������������ص㡣�����������������磺ֱ������������ʽ�첽�綯����ѹ��������������ʽ�첽�綯��Y-����������ʽ�����첽�綯������������������״̬�����پ�����һ���ĸ����£�������������Ҫ��Ϊ�ĸı�綯����ת�٣�����������е������綯�������Ҫ�������ܵĺû�����Ӱ�쵽������е�Ĺ���Ч�ʺͲ�Ʒ��������Ƶ���ټ����Ļ���ԭ���Ǹ��ݵ��ת���빤����Դ����Ƶ�ʳ����ȵĹ�ϵ��ͨ���ı�綯��������ԴƵ�ʴﵽ�ı���ת�ٵ�Ŀ�ġ�
�ؼ����������첽�綯�������ת�٣���������
ʵ�鷽�����
һ��ԭʼ���Ϸ���
һ̨�����������첽�綯���������PN=100W,���ѹUN=220V�������IN=0.55A,�ת��nN=1420r/min������ת�����������ΪY�ӷ���E����Ե��
����������ݼ�Ҫ��
1.��������첽�綯�����������ʵ���·��
2.ѡ����DZ������̣�
3.���ʵ�鲽�裻
4.ʵ����ԣ�
5.����Matlab/Simulink���滷������Ƶ�·���з��棻
6.��ʵ����Խ��ͬ���������бȽϣ�
7.�Խ���������۷�����
����ʵ��Ŀ��
ͨ��ʵ�������첽�綯�����͵��ٵķ�����
�ġ�ʵ����Ŀ
1.�첽�綯����ֱ����
2.�첽�綯�����Ρ��������Σ�Y-����������
3.����ʽ�첽�綯��ת�����鴮��ɱ��������
4.����ʽ�첽�綯��ת�����鴮��ɱ���������١�
�塢ʵ���豸������
1��MELϵ�е��ϵͳ��ѧʵ��̨����������
2��ָ��ʽ������������
3��������켰�����ת��ת�ٲ�����MEL-13��MEL-14����
4��������䣨MEL-09����
5������ʽ�첽�綯����M04����
6������ʽ�첽�綯����M09����
�����DZ�����
����ʵ�����Ҫ��,���ѹUN=220V�������IN=0.55A��Ϊһ��ѡ���������������3-5���Ķ��������1.65A--2.75A��
����ѡ������Ϊ��
��ѹ������300V��
���������� 3A��
ʵ�鲽�����
һ��ʵ�鷽��
1�����������첽�綯��ֱ����ʵ�顣
����·ͼ1-1���ߣ��������Ϊ���ӷ���
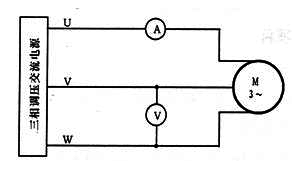
ͼ1-1�첽�綯��ֱ������
��ǰ����ת��ת�ٲ���ʵ���䣨MEL-13���С�ת���趨����λ����ť��ʱ������ף���ת�ٿ��ơ�����ת�ؿ��ơ�ѡ�ذ���ת�ؿ��ơ�������������MEL-13�������Ƿ����á�
�DZ���ѡ������ѹ��Ϊ����ʽ��ָ��ʽ���ɣ�������������Ϊָ��ʽ��
a�������ཻ����Դ������ť��ʱ������ף�������ɫ���պϡ���ť�����ڵ�ѹ����ʹ�����ѹ�������ѹ220����ʹ�������ת��������۲�MEL-13�е�ת�ٱ�������ֵ��ת����Ҫ�������жϵ�Դ�����������������������
b���Ͽ����ཻ����Դ�����綯����ȫֹͣ��ת��ͨ���ཻ����Դ��ʹ���ȫѹ���۲�����˲�����ֵ��
ע����ָ��ʽ������ƫת�����λ������Ӧ�Ķ���ֵ�������������������������������ʾ�����ֵ�䲻����ȫ���������Ķ������������ɺ����漸�����������������ԵıȽϡ�
c���Ͽ����ཻ����Դ������ѹ���˵���λ�������Ӳ��������ؿ��У��������ת�Ӷ�ס��
d���������ཻ����Դ�����ڵ�ѹ�����۲��������ʹ���������2~3�����������ȡ��ѹֵUK������ֵIK��ת��ֵTK��������У�ע��ʵ��ʱ��ͨ��ʱ�䲻Ӧ����10�룬����������ȡ�
2������������Y-������
����·ͼ1-2���ߣ���ѹ������������ѡ��ͬǰ������Sѡ��MEL-05��
a����ǰ���������ѹ���˵���λ������˫�����غ����ұߣ�Y���ӷ������ϵ�Դ���أ����ڵ�ѹ����ʹ�����ѹ������������ѹUN=220V���Ͽ���Դ���أ������ͣת��
b���������ȫͣת���ϵ�Դ���أ��۲���˲��ĵ�����Ȼ���S������ߣ����ӷ�������������������У��������̽������۲���˲�����������ʾֵ�����������������ԱȽϡ�

ͼ1-2�����첽�綯�����Ρ���������
3������ʽ�첽�綯��ת���鴮��ɱ��������
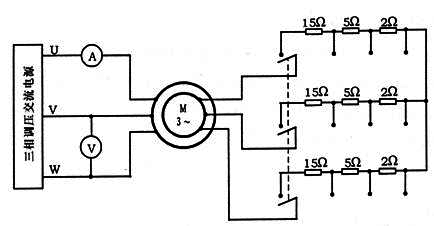
ͼ1-3����ʽ�첽�綯��ת���鴮��ɱ��������
����·��ͼ1-3���ߣ������������Y�νӷ���ת�Ӵ���ĵ�����ˢ�ο��������ڣ����ڵ������MEL-09�����ߵ�����裨��0��2��5��15�����嵵����MEL-13�С�ת�ؿ��ơ��͡�ת�ٿ��ơ����ذ���ת�ٿ��ơ�����ת���趨����λ����ť˳ʱ����ڵ��ס�
a����Դǰ���ѵ�ѹ��������λ���������Ϊ�㡣
b�����Ͻ�����Դ�����ڽ�����Դʹ�����ע����ת���Ƿ����Ҫ��
c���ڶ��ӵ�ѹΪ180��ʱ����ʱ����ڡ�ת���趨����λ�����ף�����ʽ���ת��������ֻ�м�ʮת������ȡ��ʱ��ת��ֵIst��Ist��
d����ˢ�ο����л����裬�ֱ��������Ϊ2����5����15������ת��Tst������Ist ��
4������ʽ�첽�綯�����鴮��ɱ���������١�
ʵ����·ͬǰ��MEL-13�С�ת�ؿ��ơ��͡�ת�ٿ��ơ�ѡ�ذ���ת�ؿ��ơ�����ת���趨����λ����ʱ�뵽�ף���ת���趨����λ��˳ʱ�뵽�ס�MEL-09�����ߵ�����衱���ڵ��㡣
a�����ϵ�Դ���أ����ڵ�ѹ�������ѹ��UN=220����ʹ���������
b�����ڡ�ת���趨����λ��������ť��ʹ�綯��������ʽӽ�����ʲ��������ת��T2���䣬�ı�ת�Ӹ��ӵ��裬�ֱ�����Ӧ��ת�١������ݼ�¼�ڱ�1��
��1 U=220V If= 100 mA IF=0.612 A��T2= 0.849 N·m��

ʵ���������
һ�������첽�綯��Simulink����ģ�͵Ľ���
ʹ��Simulink���������첽�綯����ֱ����ģ�ͣ���ȡ�����첽�綯��ֱ�������е�ת�٣�ת�أ�ת�ӵ��������ӵ����ı仯���ɡ�
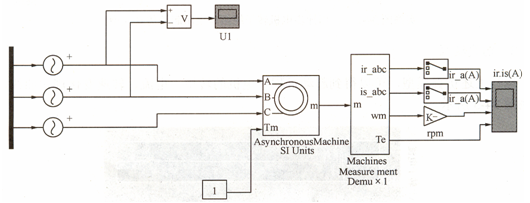
�����첽�綯����������ٷ���ģ��
����ʱӦ�Ƚ���0��������������, �����������, Ȼ��������ԳƵ������Ϊ2��5��15����ʵ�ֵ���, ��ʱ���п�ʼǰӦ���������Xintial state �ķ��������ó�Xfinal,���Ƚ��綯���Ĺ�����ѹ����Ϊ220V�����з���ģ�͡������н�������������������ú���ָ�����������ָ�
Xinitial=Xfinal
Xinitial =
1.0e+002*
-0.01155604448671 0.00267230527579 -0.01185555103566 0.00289624717602 1.81988939024069 0.00993222435709
���к�ɵõ���ת�ӵ��������ӵ�����ת�٣�ת�صĹ�������:
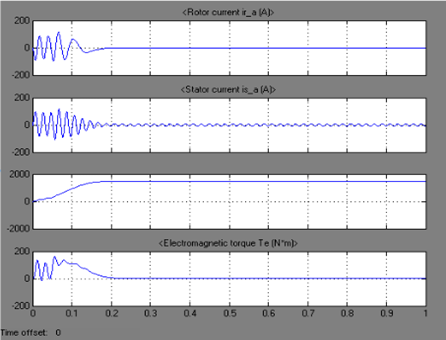
����Ϊ0��ʱ��������ͼ

����Ϊ2��ʱ��������ͼ
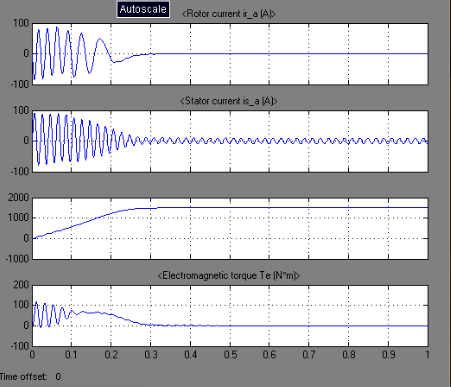
����Ϊ15��ʱ��������ͼ
���� ���۷���
�������첽�綯��ת�Ӵ��븽�ӵ��裬ʹ�綯����ת���ʼӴ綯���ڽϵ͵�ת�������С�����ĵ���Խ�綯����ת��Խ�͡��˷����豸�����Ʒ��㣬��ת����Է��ȵ���ʽ�����ڵ����ϡ����м����٣���е���Խ�����
�������첽�綯����ת�Ӵ���������ʱ������������С������ת�ط�������ת�ӵ�
·�ڴ����������������ã�����ת�ӵ�·�ĵ�������ʹת���迹����ת�ӵ����������������С��������ӵ���������Ҳ��Ӧ��С���ʵ�ѡ�����������ֵ����������ת��������ʱ��Ȼת�ӵ�����С����ת�ӵĹ�������������������ת��Ҳ����
ת�����鴮����裬��ת����ֵ���ӣ�ʹ�õ綯����ת�����ӡ�
����Matlab������Simulink���ܽ������첽�綯��ͨ�ö�̬����ģ�ͣ�����ֱ�ۡ����㡢�����ص㡣��ַ�����Matlab��ǿ��������㹦�ܼ���ͼ�����ֱ������ģ�͵����ƣ�ʹ�÷���������ӷ��㡢��ݣ������Ч�ʺ;��ȡ�
ͨ���첽�綯���������̵�ʵ�������������֤ʵ�˶�̬����ģ�͵���ȷ�Զ����ڷ���ʱ�������ı�����������ʱ�ع۲���沨�Σ�ʹ�÷�����Ӿ���ʵʱ�ԡ�ֱ���ԡ�
�ܽ�
��������ʽ�첽�綯����ϵͳ������һ���dz����ӵĿ��⣬�����������ڵ�ѧϰ��ʵ�飬ʹ�������������ƹ����У�ѧ���˲��ٶ���������һ�������˵����·��Ƶ�ԭ���������˽�������רҵ�Ļ����γ̡����ε�ʵ��Ŀ����ͨ������Ƚϼ�ʵ�����⣬���̺ͼ����ڡ����ѧ���γ�����ѧ������֪ʶ��ʵ�鼼�ܡ�ѵ��ѧ���ۺ�����ѧ���ĵ�����϶�����֪ʶ���ڽ�ʦָ������ɲ������ϣ�ѡ����֤��������ѧʵ�飬��������ȹ�����ʹѧ���������յ��������϶������γ���Ƶ�һ�㲽�裬ͨ��������ϵʵ����ߺ�����ѧ�����������ʵ������������ʹ���������Ϊ�����γ̵�ѧϰ����ҵ��ƺͱ�ҵ��Ĺ�������һ���Ļ�������ǿ������֪ʶ��ʵ��ͳһ����������ǿ���Լ����ֲ�����������
�ڴ��ڼ���Ҳʧ���Ҳ��һ��������ǡ��ӿ�ʼʱ�������鵽���ˮ����ĸ������飬���ε������һ�ζ���Ҫ���һ���ɹ��ĵ�·����Ҫ�����ģ�Ҫ�м�ֵ���������Ҫ����ʵ��������̺ܿ����൱��������ʱ���ܳ�ʱ����Ƴ����ĵ�·������Ҫ��������ʱ����δ���е���ģ���ʱ���ر�����������һ��ǽ�����ʦһ���ɹ���·��ƣ��ڶ��ַ�����ѡ���У�����ϸ�ȽϷ�����ԭ���Լ����е�ԭ�����������ʦ������ָ���£�ʹ������·�����ȶ������������Ժ�Ĺ�����Ҳ�Ǻ����ô��ġ�
�ڱ���ʵ����о���ʵ�������У���Ҫ�����һ�¹�����
��1���ڲ�ѯ�˹������й������첽�綯���������ԭ����������ϵĻ����ϣ������������첽�綯����������ٵ�ԭ����
��2������Matlab/Simulink���湤�߶Ը���������ʽ���ж�̬���棬���������Կ�����Ƶ����Ŀǰ��õĵ��������ʽ�����Ի����������Ե�����������в��ɱ�������ơ�
��л
�����ʵ����ǶԴ�ѧ������ѧרҵ֪ʶ��һ���ۺ����ã�Ҳ��һ���¹�֪�µĹ��̣�����һ������ѧϰ�Ĺ��̣�Ϊ�Ժ����ǵı�ҵ���Ĵ����˽�ʵ�Ļ����������������ڵ�æµ���������������ʵ���Ѿ��ӽ�β�������ھ�����ѷ�������������Dz���ȫ�ĵط������û�е�ʦ�Ķ���ָ�����Լ�һ��ѧϰ��ͬѧ�ǵ�֧�֣���Ҫ�������������������ġ�
��ɱ���ʵ������Ҫ��л�ҵ�ָ����ʦ��������ʦ��������Ŀ�ѧ̬�ȣ��Ͻ�����ѧ�������Ĺ������磬����ظ�Ⱦ�ͼ������ң��������Ҷ�ѧ�������������һ���Ƚ��������˽⣬������ѧ�����ĵ���ƹ����в��Ϲ����ң�ʹ�����ı���������һ�Ҫ��л�ҵ�ͬѧ�������û������ʵ�鷽��İ������������������ʵ�����֡�
���˲����˴�����������ڵ綯��ϵͳ����ļ������ף��Ե�ǰMATLAB�ķ���ģ���ڵ綯�����飩ϵͳ�����õ��о��ͷ�չ״�������������������ڵ綯��ϵͳ�ķ�������������Ĺ�����ʵ���˶������첽�綯�����������Եķ�������档���ַ������ŵ����ٶȿ죬ʵʱ�Ժã����õ͡���Ȼ�����������������������ķ��桢�����ķ�����
�����ڽ��ǰ���о��ľ���ͽ�ѵ�Ļ����ϣ��������첽�綯�����������ԵĽ�����MATLAB���档���������������Ҫ�������һ�Ҫ��MATLAB�Ը���ĵ綯���������Խ��з��棬�����ǵķ�������ʵ�ʵ�����״�����Աȣ��о���������ʵ�ʵķ�����̡������첽�綯���������Է���������һ��dz����ӵĹ������������еij�����ơ���ѧ�������漰֪ʶ��㣬���ڱ���ˮƽ���ޣ������д���ȱ�ݺʹ����������⣬������ʦ����ָ����
�ڱ��漴�����֮�ʣ��ҵ�������ƽ�����ӿ�ʼ�����������˳����ɣ��ж��ٿɾ���ʦ����ͬѧ�����Ѹ��������Եİ�����������������ҳ�ֿ��л�⡣���Ȿ�IJο��˶�ƪ���ģ��ڴ�һ����ʾ��л��
�ο����ף�
[1]�½�ҵ���������ӵ�·�ļ�������棬�������廪��ѧ�����磬2005
[2�Ƴ�������,�˺���,��.˫�ظ�Ƶ�任�������첽�綯��������[J]. �������Ӽ���, 2009, 43(12):52-54.
[3]���˸�. �������Ӻ͵����϶�����ϵͳ�� Matlab ����[M]. ����: ��е��ҵ������,2006:1-2.
[4]��ۿ��, �ƻ���, �����. ���� MATLAB ���첽�綯�������̵ķ���[J]. ������ѧԺѧ��, 2003, 20(7): 101-104.
[5]������, �ֵ�, �����. ���� SIMULINK �첽�綯��������ϵͳ�ķ���[J]. ������ѧԺѧ��, 2006, 26(3): 141-143.
[6]�˽���������MATLAB/SIMULINK ���첽�綯������ģ�ͼ��������̵ķ���[J].���Ϲ���ѧԺѧ������Ȼ��ѧ�棩��2002��1��.
[7]��ά�ˣ������첽�綯����ʽ������[J].����������2001.
[8]�Ž�����������ʷ����.�����첽�綯���������̷������[J].��С�͵����2002��06��.
[9]��������dz�������첽�綯������ɺ���ԭ��[J].�ִ�������Ϣ��20##��03��.
�ڶ�ƪ���Ͼ���Ϣ���̴�ѧ����ѧԺ
����ѧԺ
�������
�� Ŀ ����LINUX����ϵͳ�ķ���ǽ�����������ʵ��
ѧ������ ѧ ��
Ժ ϵ ר ҵ ���繤��
ָ������ ����
2011 ��3�� 15��
CA������ϵ��Ӧ����ϵ�ij����о�
ժҪ�� ������Ҫ������CTCA��֤�����Ļ���ԭ����CA��֤ϵͳ��ϵ�ṹ�Լ�Ŀǰ�ķ�չ��״�������˴�ͳ��PKI��ϵ����CA��֤��ϵ�ķ�չ������漰��CA�����������ʶ������Ӧ�õ�һЩ��������
�ؼ��ʣ�CA��Ϣ��֤������ CA��֤ϵͳ��ϵ�ṹ�� PKI��ϵ�� ��CA��֤��ϵ
���ԣ�
CA����
����֤����һ�����ֱ�ʶ������˵��Internet�ϵİ�ȫ���ջ�����֤���������ǵ�������������ʱ���û����տ���֤ʵ������ݣ�����������������ҡ�����֤���ṩ���������ϵ�����֤���� ����֤����һ����֤����Ȩ��������ǩ���İ���������Կӵ������Ϣ�Լ�������Կ���ļ������֤�����һ��������Կ�������Լ�֤����Ȩ���ĵ�����ǩ����
CA (CertificationAuthority)������֤����֤���ģ���ָ������֤��������߷��š�������ȡ������֤��Ļ�����CA�������Ǽ��֤����������ݵĺϷ��ԣ���ǩ��֤�飨��֤����ǩ�������Է�֤�鱻α���۸ġ�
����
һ�� CA����ԭ������
��һ�� CA��֤ϵͳ�ṹ��ԭ��
1��CA��֤ϵͳ��ϵ�ṹ
��֤ϵͳ��һ��������绷��,�ӹ����ϻ������Ի���ΪCA��RA��WP�� ����ϵͳ��CA����һ�������ķ�տռ���,Ϊ�˱�֤���еľ���ȫ,����Ա���ƶȶ�Ӧ���ϸ�Ĺ涨,����ϵͳ���Ϊ�������硣CA�Ĺ��������յ�����RA ��֤������ʱ�䷢֤�顣һ��ĸ���֤�鷢�Ź��̶����Զ�����,�����˹���Ԥ��
֤��ĵǼǻ���Register Authority,���RA,��ɢ�ڸ����������ġ�RA��������������л����,���ܿͻ�����,����������,��֤����ʽ����ͨ���ڲ�������CA���ġ� RA��CA˫����ͨ�ű���Ҳͨ��RSA���м���,ȷ����ȫ��ϵͳ�ķֲ�ʽ�ṹ���� ��ҵ������Ŀ���,���нϺõ������ԡ�ͨ��Э��ΪTCP/IP��
֤��Ĺ���ϵͳWeb Publisher,���WP,����Internet����,����ͨ�û���CAֱ�ӽ����Ľ��档���û��������൱��һ�����ߵ�֤�����ݿ⡣�û���֤��䷢֮ ��,CA��E-mail֪ͨ�û�,Ȼ���û��������������������֤�顣����������û�֮������֤������֤��Ϣ��ȫ�Ժ�˫�����ݵĺϷ��ԡ�
2��CA���ĵ���������
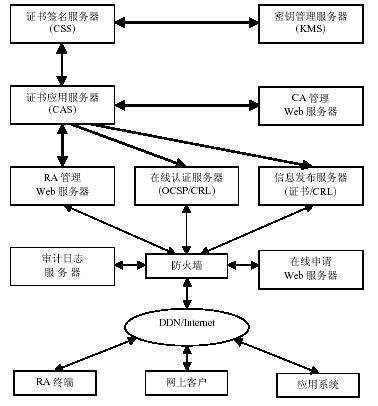
CA��֤ϵͳ����CA�����������ݿ��������Ŀ¼�������������ն˺�Ӳ�����ܻ�/���������ģ��ṹ��ͼ��ʾ��
��1�� CA�����������ڽ���֤�����롢֤�����ɡ�֤�����ϡ�֤��ָ��Ȳ�����
��2�� ���ݿ�����������ڼ�¼�û���Ϣ��֤����Ϣ����������Ϣ��������־�ȡ�
��3�� Ŀ¼����������ŷ�����֤���CRL�б����ṩ֤�����غͷ���CRL��
��4�� �����նˣ�֤�����롢���ϡ���ѯ��ͳ�ơ����õȲ�����
��5�� Ӳ�����ܻ�/��������CA�ĸ�˽Կ�����ڶ�֤�����ǩ����
CAϵͳģ��ṹͼ
3��CA��֤ϵͳ�Ļ���ԭ��
��CA��֤��������ҪӦ���˼����㷨,��ͳ�ĶԳ���Կ�㷨���м���ǿ�ȸߡ������ٶȿ���ŵ�,����Կ�Ĵ������������������ ����һЩӦ�á�Ϊ���������,70������������˹�����Կ�㷨,���㷨ʹ��һ����Կ��һ��˽Կ��һ����Կ,���Ӧ��ϵ��Ωһ��,��Կ�����,˽Կ���� ���ܱ��档һ���ù�Կ�����м���,��˽Կ������ǩ��;ͬʱ˽Կ��������,��Կ������֤ǩ�����㷨�ļ���ǿ����Ҫȡ����ѡ������Կ����
������ CA��֤ϵͳ���ɼ���ع���
1.CA��֤ϵͳ�Ĺ���
ĿǰCA��֤ϵͳ��Ҫ����������ɣ��ڿͻ�������֤���û�������֤�����롢��ѯ������ϵͳ����RA����RA����Ա��֤���������������֤����Ȩϵͳ����CA����̨��ǩ���û�֤���֤��ǩ��ϵͳ��
2��CA��֤���ĵĹ���
��1��
CA��֤����
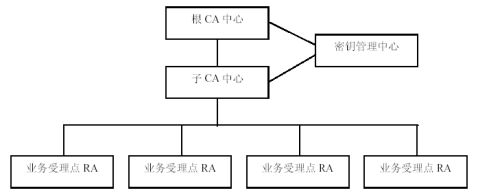
CA��֤������һ�����ź�������֤���Ȩ����������֤����ͨ�����ö��εķּ��ṹ���ϼ���֤���ĸ���ǩ�������¼���֤���ĵ�֤�飬����һ������֤����ֱ�����������û���
��֤���ĵ���Ҫ���ܣ� ֤��İ䷢�� ֤��ĸ��¡� ֤��IJ�ѯ�� ֤������ϡ� ֤��Ĺ鵵
��2�� ����ǩ��
����ǩ����ͨ��һ����������Ҫ���͵���Ϣ���д����õ���������֤��Ϣ��Դ����ʵ��Ϣ�ڴ��������Ƿ����仯��һ����ĸ���ִ�������ǩ���ṩ�˶���Ϣ��Դ��ȷ�����ܼ����Ϣ�Ƿ۸ġ�
����ǩ�������ݼ�����ȫ���������ݿ��Լ�ǩ���ּ��ܣ�ֻǩ����ֻ���ܣ���Ȼ��Ҳ���ԼȲ�ǩ��Ҳ�����ܡ����ͷ��������ǩ��������һ�������շ���ǩ��ֵ�ǹ��ڷ��ͷ���˽Կ��Ҫ���͵���Ϣ��һ����ѧ������ֵ���㷨�Ĺ��챣֤�����֪��˽Կ�Ļ��Ͳ����ܼ�������ǩ��ֵ�����շ�����ͨ���������ͷ��Ĺ�Կ��ǩ��ֵ�ͽ��յ������ݵ���һ����ѧ�㷨����֤���յ�����Ϣ���Ƿ��ͷ�ǩ������Ϣ�� ��3�� ����֤��
a������֤��ĸ��� ��
����֤���������ͨ���б�־ͨ�Ÿ���������Ϣ��һϵ�����ݣ���������������ʵ�����е�����֤��������һ��Ȩ���������еģ����ǿ����ڽ�����������ʶ��Է������ݡ� b������֤������ã� ������Ҫ�ͻ���֤�İ�ȫINTERNETվ�㣻�öԷ�������֤����Է����ͼ��ܵ��ʼ������Է����ʹ��Լ�ǩ�����ʼ���
c������֤������� ��
֤��ĸ�ʽ��ITU��X.509V3�����塣�����������֤���������֤��������Ϣ�ͷ���֤��CA����Ϣ��֤����֤�����ݺͷ���֤���CAǩ����������ɣ�
֤�����ݣ� �汾��Ϣ��������X.509�Ľ����汾���ݣ�֤�����кţ�ÿһ����CA���е�֤�������һ��Ψһ�����кţ� CA��ʹ�õ�ǩ���㷨�� ����֤��CA�����ƣ�֤�����Ч���ޣ�֤���������ƣ� ��֤���Ĺ�Կ��Ϣ��������Կ�㷨����Կ��λ�ַ�����ʾ������������Ϣ���ر���չ��
����֤���CAǩ���� ֤��ڶ����ְ�������֤���CAǩ����������������ǩ����ǩ���㷨���κ����յ�֤�����ʹ��ǩ���㷨����֤֤������CA��ǩ����Կǩ���ġ�
��4�� ��ȫ���ֲ㣨SSL��
SSL��Secure Sockets Layer����ȫ�Ӳ㣩��һ���ṩINTERNET�ϱ����Ե�����Э�顣�������ͻ�/������Ӧ����һ�ֲ��ܱ�͵���ķ�ʽͨѶ������INTERNET���ϰ�ȫͨѶ�뽻�ı���SSLЭ��ʹ��ͨѶ˫����֤�飬��ͨѶ˫���佨��һ����ȫ�ġ������ε�ͨѶͨ��
���� CA������ϵ��չ��״
��һ����ͳ��PKI��ϵ
PKI�Ƕ��ڹ�Կ���������еĹ�Կ��Ϣ�Ĺ�������Կ����������һ������ϵͳ����ʹ��һ����ѧ��ص���Կ�����ܺͽ�����Ϣ���ڹ�Կ���������У�һ����Կ�������ܻ������Ϣ����һ����Կ����ִ���෴�IJ���������һ����Կ���뱣�ܣ���Ϊ������Կ����һ����Կ���Էַ����κ��ˣ���Ϊ������Կ���ڹ�Կ������ʩ�У�����֤������ݽṹ����һ���ض�������ͬһ���ض��Ĺ�Կ�ù�Կ���ʹ�õ���Ϣ����һ����Ϊ�㷺ʹ�õ�֤���ʽ��ITU�����X.509֤�顣֤������ǿ����ε�ʵ�壬����Ϊ��Կ������ʩ�е��û�����֤�飬�ṩCA���ŵ�֤���״̬��Ϣ��
��ͳ��PKI�ṹ�������������������CA���ּ��ṹ��CA����״�ṹ��CA��ÿ�ֽṹ��PKI�Ļ�������������������PKI���û��������ε�CA����Ϊ�û������ε㣩���������ڶ�CA��PKI�����У�CA֮������ι�ϵ��
�������PKI�ṹ�ǵ���CA�Ľṹ����ΪPKI�е������û��ṩPKI����֤�顢֤��״̬��Ϣ�ȵȣ���PKI�е������û��Դ˵���CA�������Ρ�ÿ��֤��·������ʼ�ڸ�CA�Ĺ�Կ����Ͳ����˵�һ���û����ε㡣
���ֽṹ���ŵ��ǣ�����ʵ�֣�ֻ�轨��һ����CA�����е��û�����ʵ�����֤��ȱ���ǣ�������չ��֧�ִ����Ļ��߲�ͬ��Ⱥ����û����û���Ⱥ��Խ��֧�����б�Ҫ��Ӧ�þ�Խ���ѡ�
����ʵ�����У�һ��֤��������ѵõ������û��������������������е������û�֤�飬�������֤�����Ҳ���Ѷ�����DZ��ע���û����㹻ȫ����˽⣬�����Ҫ���CA�����ǵ�Ȼϣ��������CA��չ��֧�ֲ�ͬȺ���CA������������һ������ġ���Ϊ��������PKI�������������CA���������ַ�ʽ��������ɸ����PKIϵͳ��ʹ�����ӹ�ϵ������ʹ�öԵȹ�ϵ��
һ���Դ���CA��ϵ������PKI�����ּ��ṹ��PKI������������£����е��û�������ͬһ����CA���ڽ������Ͻ���˫����������֤ʱ������˫�������ṩ�Լ���֤�������ǩ������CA����֤�������Ч�Ժ���ʵ�Ե���֤����һ���������ض�CA��֤�Ĺ�Կ�û�Ҫ������һ��CA���Ź�Կ֤����û����а�ȫͨ�ţ���Ҫ����������֤��
�ּ��ṹ��PKIϵͳ������Ľṹ�͵���Ŀ����ι�ϵ������4���ŵ㣺��һ���ŵ��Ƿּ��ṹ��PKIϵͳ���������������µ���֤���û�����Ϊֻ��Ҫ��CA�����֤���CA�������ι�ϵ���ڶ����ŵ���֤��·�������䵥���ԣ�������չ�������ɴ��û�֤�鵽�����ε�ļġ���ȷ��·�����������ŵ���֤��·����Խ϶̡����·������������ȼ�һ��ÿ������CA��֤��·�������û���֤��·�������ĸ��ŵ��ǣ����ڷּ��ṹ�е�CA��λ�ã��û�������֪��һ��֤����������Ӧ�á���ˣ��ּ��ṹ��ʹ�õ�֤����Ա���״�ṹ��ʹ�õ�֤���С������
�ּ��ṹ��PKIҲ��ȱ�㡣������Ϊ��������һ����һ�Ŀ����ε㣬������CA�� ����CA��ÿ���û��Ŀ����ε㣬���İ�ȫ�Ե�����������������PKIϵͳ��ȫ�Ե�����������
�ص��ǣ����ڻ�û��ֱ�ӵĻָ��������ּ��ṹ��PKIϵͳ��ʵ�������е����ζ������ڸ�CA����һ���ÿ����ε���ֹ��ϣ�����������Եġ�����һ��ȱ���ǹ���һ����һ�ġ���ͬ�ĸ�CA���������������������ģ��������ȶ���������Һ��й���δ�ܽ�����һ����Ч�ĸ�CA�����⣬��һ��˴˷����CA���ɵ��ּ��ṹ��PKI�������Dz���ʵ�ģ���Ϊ���е��û������ò������������ǵĿ����ε㡣�ּ��ṹ��PKI�Ĵ�ͳ����������ԶԵȹ�ϵ����CA��
������֤ͼ
������֤ͼ��ʾ�˶Եȹ�ϵ�µĽ�����֤��CA-1��CA-2��CA-3�ǶԵȹ�ϵ������ͨ����䷢֤�飬��ʵ�ֲ�ͬ�������������û�������Ρ����磬��ͼ1�У�U1����CA-1��U1���Ҫ��֤U2֤��ĺϷ��ԣ���������Ҫ��֤CA-3��֤��6��ǩ���������֤CA-2��֤��3��ǩ���������֤CA-1��֤��2��ǩ������ΪU1����CA-1����������֤��6��U1ͨ������һ��֤�����ﵽ��֤֤��6�ĺϷ��ԡ�
�ԶԵ�CA��ϵ������PKIϵͳ��Ϊ��״�ṹ��PKI�����ߡ����������硱����ͼ2��ʾ����״PKI�е�����CA�������ǿ����ε㡣ͨ�����û�����Ϊ���Ƿ���֤���CA��CA֮�������֤�飬֤�������������˫������ι�ϵ������CA֮����жԵȹ�ϵ�����Dz��ܹ�������CA���ŵĸ������͵�֤�顣��Ϊ�����ι�ϵ�������Ƶģ��������һ��CAϣ�������������Σ��������ڷ��Ÿ�����CA��֤����������Щ���ơ�
��״�ṹ��PKIͼ
��״�ṹ��PKI���м����ŵ㡣��״�ṹ��PKI�������������µ�Ⱥ���û�����״�ṹ�е��κ�һ��CAֻ�����Ⱥ���CA�������ι�ϵ����״�ṹ��PKI�dz�����Ϊ���ڶ�������ε㡣����CA��ȫ�Ե���������Ӱ�쵽������PKI����Щ��ȫ��������CA���Ź�֤���CAֻ�������֤�飬��PKI��ɾ����CA��������CA�������û���Ȼ����һ����ȷ�Ŀ����ε㣬�ܹ���ȫ����PKI�е������û�ͨ�š�����״�ṹ��CA�У��Ӱ�ȫ��������CA�лָ�������ף�������ֻӰ�쵽�������ٵ��û�����״��PKI���Ժ�������һ������CA��������Ϊ�û�����Ҫ�ı����ǵĿ����ε㣨���������κζ���������ֻ���CA������������һ��CA����֤�顣��һ����֯��Ҫ���ϸ�������������PKIϵͳʱ�����Ǻ�ʵ�õġ�
Ȼ��������Ϊ����˫��Ŀ�����ģ�ͣ���״�ṹ��PKIҲ�����IJ��㡣֤��·������չ��ּ��ṹ��PKI��ȹ��ڸ��ӡ���ּ��ṹ��PKI��ͬ�����û�֤�鵽�����ε㽨��֤���·���Dz�ȷ���ģ���Ϊ���ڶ���ѡ��ʹ��·�����ֽ�Ϊ���ѡ�һЩѡ������γ���ȷ·����������ѡ�����������ͬ���������ǣ�����״�ṹ��PKI�п��ܻὨ��һ����ֹ����֤�黷·��������״��PKI����չ�к��л���֤��·���������PKI�е�CA�����������е��û��������֤���������ȷ������ʹ��֤���Ӧ�ã������ǻ���PKI�е�CA��λ�á�֤��·���ϵ�ÿһ��֤�鶼���������������Ҫ����ġ���Ϊ���ӵ�֤���Ϊ���ӵ�֤��·��������
CA֮������ι�ϵ�����ǶԵȹ�ϵ��Ҳ�����Ǵ�����ϵ�����Ƿ����������ֽṹ������ȱ�㡣����ʵ�����У�֤���û�Ⱥ��֮��Ĺ�ϵ�������ǻ������ӹ�ϵ����Ϊ�û�Ⱥ���Ƿֱ�����IJ��ţ�����û����ȷ���������������ȱ�����������������ЩȺ��������ҵ��˴˶����ܵĵ�����������PKI��ϵ�еĸ�CA�����ı�����ε㽫���û�Ⱥ��֮���Ѿ������Ĺ�ϵ������ͻ��
��״�ṹ��PKIͼ������״�ṹPKI��CA֮��ͨ�������֤��������˫��Ŀ����ι�ϵ����ͬ�û�Ⱥ����û�������һ����һ�Ŀ����ε㡣ÿ���û���Ȼ���θ�������֤���CA��������һ����ҵ�ڲ���������ϵ����ȷ�ģ���״�ṹ���ܷ�ӳ��Щ��ϵ����˶Ե�
��ϵ���ܸ������飬������Ҫһ���µ���֤��ϵ��
��������CA��֤��ϵ
��CA��ϵ�ṹ����Ƴ������˷����ֻ�����PKI�ṹ��ȱ������Ӳ�ͬ�ṹ��PKIϵͳ����ͬ����״��CA����CA��BCA����ֱ�����û�����֤�顣���ң�BCA����Ϊһ�������ε㣬��PKI�е��û�ʹ�ã���һ�㲻ͬ�ڷּ��ṹ�еĸ�CA��BCA�벻ͬ���û�Ⱥ�彨���ԵȵĿ����ι�ϵ�������û�����ԭ�еĿ����ε㡣��Щ��ϵ����������γɡ������š���ʹ�����Բ�ͬ�û�Ⱥ����û�ͨ��ָ�����μ����BCA����á�
���һ���û�Ⱥ���Էּ��ṹ��PKI����ʽ����������BCA�����PKI�ĸ�CA������ϵ��Ȼ��������û�Ⱥ������״�ṹ��PKI����ʽ����������BCAֻ��Ҫ���PKI��������һ��CA������ϵ������������У�PKI����BCA�γ����ι�ϵ��CA����Ϊ����CA����
��CA���Ӳ�ͬ��PKI��ϵͼ��ʾ��BCA����״�ṹPKI�ͷּ��ṹPKI���û�Ⱥ�彨�����ι�ϵ����CA�ֱ�ѡ����CA-1��CA-2��CA-3�����Ե����ι�ϵ��CA-1��CA-2��CA-3�ֱ��Ǹ���PKI��ϵ����CA���û�U1�յ���״PKI��һ��CAǩ����֤�飬ʹ����״�ṹ�е�һ��CA��Ϊ���Ŀ����ε㡣�û�U5�յ��ּ�PKI��һ��CAǩ����֤�飬��ʹ�ø�CA��Ϊ���Ŀ����ε㡣U1 ��U5�ܹ�ʹ��ͨ��BCA�����ڵ������ź����Ǹ��ԵĿ����ε����������ι�ϵ��ʹ�������ܹ��˴��Կ����εķ�ʽ���֤��
��BCA������PKI��ʱ��Ϊ���ķ���ʽ��hub-and-spoke��PKI��BCA�ڵ�һ�ġ���֪�ĺ��������Ӷ��PKI������״�ṹ��PKI��ȣ���BCA�ܹ���PKI�У�֤��·���ķ��ֱ�ý�Ϊ���ס��û������֪�����ǵ�BCA��·�����Ӷ�ֻ��ȷ����BCA���û�֤���֤��·��������֮�⣬BCA�ܹ���PKI���������ͬ������CA���������״�ṹPKI�����и��̵Ŀ�����·����֤��·�����ֱ���ּ��ṹ��Ȼ�����ѡ����͵�·�����ȴ�Լ������һ����Ȼ����BCA�ܹ���PKIϵͳ�ķ�ɢ�����Ը���ȷ�ش�������ʵ�����е�֤������Ĺ�ϵ��
��CA���Ӳ�ͬ��PKI��ϵͼ
��������CA�����ٵ���ս
��Ȼ�������BCA��PKIϵͳ����Ҫ�ϰ������η��棬������Ȼ��Ҫ��Ը���ļ�����ս������֤��·������Ч���ֺ�ȷ�ϣ�����PKIĿ¼�Ļ������ԡ���ǰ���Ѿ�ָ��������֤
��·���ķ��ֺ�ȷ�ϣ���״�ṹ��PKI�ȷּ��ṹ��PKIҪ��Ϊ���ѣ���Ϊ��PKI�д��ڶ�������ε������ֹ�Ŀ����λ����ڵĿ����ԡ�һ������BCA�ṹ��PKIϵͳ��ȻҪ����������״�ṹ��PKI�������Ҫ���е��û��ܹ�������ȷ�ϸ��ӵ�֤��·��������֮�⣬BCA��������֤����Ϣ�����Ʋ�ͬ��ҵPKI�Ŀ����ι�ϵ������ζ��֤�齫��Ϊ���ӣ�PKI�û���֤��ȷ�Ϲ����У�������������ʹ�ö���Ŀ�������Ϣ��
����BCA��PKIϵͳ����һ��������ս����λ�ȡ֤���֤��״̬��Ϣ������Ч��PKIϵͳ�У��û��������ػ�ȡCA֤����û�֤�飬�Լ�ͨ��һ�ַַ����ƻ����Ӧ��״̬��Ϣ��
���ڵ�PKI�����ϣ������ȫ�ֵ�X.500Ŀ¼�����������⡣һ��PKI�û����ӱ��ص�X.500Ŀ¼�л�ȡ�ض���֤���֤��״̬��Ϣ���ر���ͨ��֤�����������������ص�X.500Ŀ¼�в�����������Ϣ������ͨ��ȫ�ֵ�X.500Ŀ¼���ҵ�����������һ�ַ�����PKI�û��ܹ�������ͨ����ѯ����Ŀ¼�ҵ��������Ϣ����������PKIϵͳ��Ҫʹ��LDAP��WEB��OCSP������֤��״̬Э�飩���������ַ�֤��Ͳ�ѯ֤��״̬��Ϣ��
�ڴ��ڶ��ַַ����Ƶ�PKIϵͳ�У��û��˵�Ӧ�ã���Ҫ֧�ֶ��ּ���Э������Ѱ����Ҫ����Ϣ�����������Ҫ����һЩ�������ڷ��ֺ���֤���ӵ�֤��·����������ͬ��PKI��Ϣ�ַ����ơ�
���ģ���CA��֤��ϵ�ڹ���Ӧ������
Ϊ�ٽ������������й���˳����չ��20xx���20xx���й�������һ��PKI�ȣ�һЩ��ҵ���ź͵ط����ѽ������Լ���һ��CA��ϵ�����н���Ӱ�����ҵCA�У��й�����CA��ȫ��֤���ģ�CTCA�����й�������֤���ģ�CFCA�����й����ʵ���������֤���ġ��й�����CA��֤���ģ�CPCA�����й�����CA��֤���ĵȡ��ط�CA�У��Ϻ���������CA��֤���ģ�SHECA��������������֤����֤���ģ�BJCA�����㶫ʡ����������֤���� �� ����ʡ����������֤���ġ�����ʡ����������֤���ġ�ɽ��ʡCA��֤���ĵ�ʮ��ҡ����е�һЩ��ҵCA���ڸ�ʡ������RA��ע���������ģ���
ʵ�ֲ�ͬCA��֤��ϵ�Ļ�ͨ�Ե�������Ŀ�չ���ŷdz���Ҫ�����á�����Ϊֹ�����ڲ���PKI����ҵ�Ժ��٣�����ȱ�����õĻ�����������Ҫ�ϰ�֮һ����Ϊ��Ŀǰ����£�����CTCA֤����û������BJCA���û��Dz������˫����������֤�ģ��û��ڲ�ͬ����²��ò�ʹ�ö��֤�顣��ˣ�ʵ�ֲ�ͬCA��֤��ϵ�Ļ�ͨ��Ե�������Ŀ�չ�ܴ���ƶ����á�
����CA��ϵĿǰֻ����������ʵ���˻�ͨ�������й�Э����֤��ϵ����Ҫ��ͨ����䷢֤����ʵ�ֲ�ͬ��֤���û�֮��Ľ�����֤��
����BCA��PKIϵͳ���Ժܺõ���Ӧ�й�Ŀǰ��PKI��ϵ����״�����й���CA����ҵ�ڵģ��еط��ģ����м����ڵġ���ЩCA��ϵ�������ܼ����Ƿּ��ṹ����CA����֮��Ҳ���Ѵ�ɹ�ʶ��������ڽ���һ��ȫ���ĸ�CA��
���������һ��ͳһ��ȫ����״�ṹ��PKIϵͳ����ȫ������״�ṹ��PKIϵͳ��������ι�ϵ�����������临�Ӿ��ˡ�����CA���ʺ�Ŀǰ����CA����״����������CA֮���������Բ�ͬ����������û����Կ����εķ�ʽ�˴�ͨ�š�
��������������ģ����������ͬ����֮����û�Ҳ������֤����֤�����⡣��CA�ṹҲ�����ڲ�ͬ����֮���CA��֤����������֮��֤���û����ڲ�ͬ����֤����Ȼ����ͬ��Ϊ������ϵ����˲��ܽ���ͳһ�ĸ�CA��ʵ�ֻ�ͨ������Ҫ�����ϵ�200������ҽ���һ����״��CA��ϵ�������ѣ���˽�����CA���DZȽϺõ�ѡ��
��������CA�����������ʶ������Ӧ�õĻ�������
���Ż������IJ��Ϸ�չ��Խ��Խ������ǿ�ʼ�������߽��ס�Ȼ���������ڿ͡���������Լ���ҳ��ðթƭ�ȶ�����в�������߽��İ�ȫ�Դ����˼������ս�������������緸����������Ƕ��������ݵ�����Σ�������֤��������˭��������η�ֹ����ð�õ�������һ�γ�Ϊ���ǹ�ע�Ľ��㡣���ڼ����������ϵͳ�г��õ�������֤��ʽ��Ҫ���û���+���뷽ʽ��IC����֤��ʽ����̬���ʽ��USB Key��֤��ʽ������ʶ����֤��ʽ�ȡ�
ÿ�������豸���������������ڳ���ʱ����Ψһ��MAC��ַ��MAC��ַ����¼��Network Interface Card(����,NIC)��ġ�MAC��ַ��48���س�(6�ֽ�),16���Ƶ��������.0-23λ������֯Ψһ��־��(organizationally unique ����ʶ��LAN�����������ڵ�ı�ʶ.24-47λ���ɳ����Լ����䡣���е�40λ���鲥��ַ��־λ��������������ַͨ����������������������������EPROM��һ������оƬ��ͨ������ͨ�������д�������洢���Ǵ�������ʱ�������Ա�ʶ�������ݵĵ��Ժͽ������ݵ������ĵ�ַ������ȫ��Ψһ�ԡ�
ͨ���������豸��ʶ����ͨ��IP��Mac��ַ�ȷ�ʽ��������жϽ���������豸�Ƿ�Ϸ���ȴ����ʶ��ʹ����Щ�豸��Ա�ĺϷ��ԡ��లȫ��ϵͳ�ĸ��ӻ����£���ȫ��߽硢����������ȫ�豸�ȸ����豸����Դ�Ĺ����Ϳ����Բ���IP���ˡ��˿ڿ��ơ�����ɫ��Ȩ�ȼ�ʶ��ʽ���з��ʿ��Ʊ����������б�ʽ���ױ���ƭ���ð�����Ա�֤ϵͳ��������Ϣ�İ�ȫ��ͨ����Կ֤������豸���а�������Ч��ֹ������ƭ���ð��Ϊ����ϷǷ��豸�Ľ��롣
Ϊ����Ч��ֹ������ƭ���ð��Ϊ����ϷǷ��豸�Ľ��룬��֤�����������豸��������������ʵ���ݣ����ǿ��Բο�CA��֤�Ĺ����취�������ƣ�ͨ����Կ֤������豸����Mac��ַ�������Ϳ��Զ������豸��������������ͳһ��������Ч���ƣ��������������������������кͱ��ص�����Ŀ��١�������չ��
�����
[1] ������. ��PKL������Ӧ���о���2002����02��
[2]�Ӷ������»��壬����.��CA��֤����ϵͳ��֤�鳷�����Ƶ��о���ʵ�֡������������
���棬2002����06��
[3]��Ԫ��.������Windows2000��PKIʵ�֡��������ʱ�����棬2001,(02).
[4]���գ���չ.������ǩ��.�����ŷ������֤�顷�������Ӧ�ó��棬2002����03��.
[5]������PKI������Ӧ�ü����о������й���ѧԺ�о���Ժ���棬2004
[6]������������۵�������CA��֤�������ҹ��ķ�չ��.�ִ���ҵ��2007����14��
[7]���������������CA��֤ϵͳ�����о������������Ϣ��2006����18��
[8]��������������������ۡ����ڶ��棩���廪��ѧ�����磬2002