摄影测量实习报告

摄影测量部分实习调查表
第二篇:VirtuoZo NT全数字摄影测量系统实习报告
VirtuoZo 全数字摄影测量系统实习报告
一、 实习目的
通过本次实习,了解4D产品的生产过程,熟悉使用VirtuoZo 全数字摄影测量系统生产4D产品的过程,掌握生产过程中各步骤的原理,加深对有关理论知识的理解。
(1) 了解VirtuoZo数字摄影测量系统的功能;
(2) 掌握VirtuoZo数字摄影测量系统的作业流程;
(3) 加深对数字摄影测量基本理论、方法和过程的理解;
(4) 培养实际动手能力。
二、 实习过程
1、 了解VirtuoZo 系统
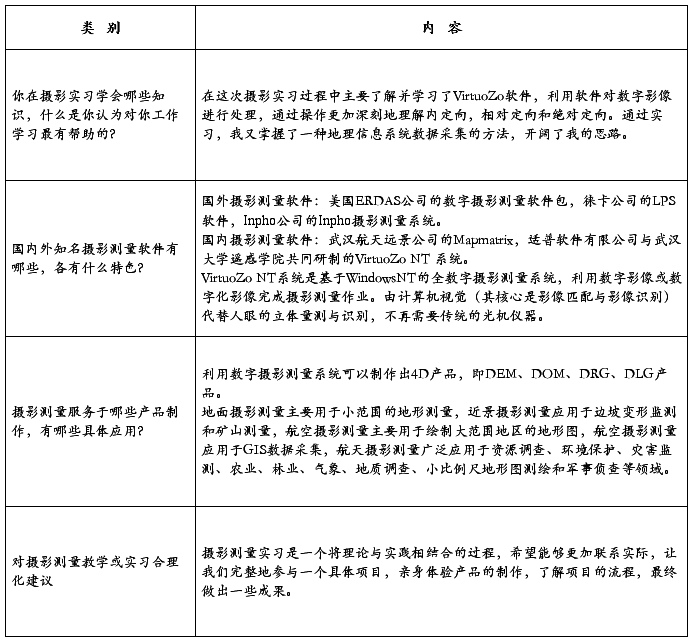
VirtuoZo系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业。由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。从原始资料、中间成果及最后产品等都是以数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
VirtuoZo的主要软件模块包括:解算定向参数、自动空中三角测量、核线影像重采样、影像匹配、生成数字高程模型、制作数字正射影像、生成等高线、制作景观图、DEM透视图、等高线叠加正射影像、基于数字影像的机助量测、文字注记、图廓整饰。
VirtuoZo的作业方式为自动化与人工干预。系统在自动化作业状态下运行不须任何人工干预。人工干预是作为自动化系统的“预处理”与“后处理”,如必要的数据准备、必要的辅助量测等及自动化过尚无法解决的问题。人工干预不同于单的人工控制操作,而是尽可能达到了半自动化。
根据VirtuoZo制作4d产品的基本工作流程如下:
2、 数据准备
(1) 实习测区资料分析
根据给定的实习的原始资料,了解测区的航线数、影像数、原始影像的分辨率、像片比例尺、全测区控制点分布、控制点数据、相机数据。
(2) 建立测区
数据准备完善后,进入VIrtuoZo主界面,首先要新建一个测区,通过文件打开测区,新建一个测区名,系统默认后缀名为blk,默认保存在系统盘下的wxf文件夹里。*.blk文件其实只是个索引文件,它最终指向的是设置测区里的测区主目录文件夹。*.blk文件建立好之后,系统会自动弹出设置测区的对话框,按照原始数据提供的信息填写相应的内容,之后保存退出。
进入设置→相机文件,找到刚才在设置测区对话框中新建的相机检校文件,双击进入参数设置界面,相机参数可以直接通过输入按钮,输入原始数据里面已有的相机文件(一般格式为*.cmr)。
进入设置→地面控制点,可以逐点输入控制点文件,或者直接通过输入按钮,直接读取一个控制点文件。
参数设置完成之后,还需要对影像文件进行转换,将各种影像文件转换成VirtuoZo支持的影像格式(VirtuoZo系统有其自有的影像格式,文件格式为*.vz。进入文件_引入_影像文件,进入输入影像对话框,通过增加按钮,将所要处理的原始影像引入对话框,由于飞机是循环飞行进行拍摄的,第二条航带的影像的相机文件需要进行旋转:选中第二条航带的3张影像,点选项按钮,在弹出的对话框中将相机旋转后面的选项选择是,确认之后即可看到需要进行相机旋转的影像前有一个红色旋转的符号。然后填写正确的像素大小,该像素大小需要在原始数据里面给出,如果没有提供该数据,可以输入-1,系统会自动读取原始影像的头文件,然后给出一个像素大小。参数设置完成之后点处理,影像开始进行转换,转换成的VZ影像将放在测区主目录下的images文件夹里面,每生成一个VZ影像,程序还会为该影像对应一个影像参数文件,文件格式为*.spt。
(3) 建立模型
进行模型的设置,现以157和156两张影像为例,介绍模型的创建过程:通过文件→打开模型,可以建立一个新模型,命名为157-156,默认后缀名为mdl,建立好157-156模型后,程序自动弹出模型参数设置对话框,按照该模型的基本情况设置该对话框,主要设置左、右影像,其它可按程序默认参数设置,之后保存退出。同样的操作,可以把其他模型都创建好,完成所有模型的参数设置。
3、 模型定向
(1) 内定向
调用内定向程序(处理→定向→内定向),建立框标模板(若模板已建立,则进入左影像的内定向)。
为了从数字影像提取集合信息,必须建立数字影像中的像元素与所摄物体表面相应的点之间的数学关系。内定向的目的就是确定扫描坐标系与像片坐标系之间的关系以及数字影像可能存在的变形。
不同型号的相机有着不同的框标模板。一般一个测区使用同一相机摄影,所以只需在测区内选择一个模型建立框标模板并进行内定向,其他模型不再需要重新建立框标模板,即可直接进行内定向处理,在做内定向处理时,系统会自动建立多个框标模板。界面右边小窗口为某个框标的放大影像,其框标中心点清晰可见。界面左窗口显示了当前模型的左影像,若影像的四角的每个框标都有白色的小框围住,框标近似定位成功。若小白框没有围住框标,则需进行人工干预:移动鼠标将光标移到某框标中心,单击鼠标左键,使小白框围住框标。
依次将每个小白框围住对应的框标后,框标近似定位成功。选择界面左窗口下的接受按钮。
左影像内定向:
该界面显示了框标自动定位后的状况。可选择界面中间小方块按钮将其对应的框标放大显示于右窗口内,观察小十字丝中心是否对准框标中心,若不满意可进行调整。框标调整有自动或人工两种方式:
自动方式:选择自动按钮后,移动鼠标在左窗口中的当前框标中心点附近单击鼠标左键,小十字丝将自动精确对准框标中心。
人工方式:若自动方式失败,则可选择人工按钮,移动鼠标在左窗口中的当前框标中心点附近单击鼠标左键,再分别选择上、下、左、右按钮,微调小十字丝,使之精确对准框标中心。
右影像内定向:
与左影像内定向相似,进行右影像的内定向。如果之前做过内定向的,系统会弹出一个对话框,显示左像片的内定向参数(系统在完成左像片的内定向后再启动右像片的内定向),并询问是否重新进行内定向。如果不想再进行内定向,选择否;退出内定向模块,进行相对定向。
(2) 相对定向
每张像片至少要有三个地面控制点,才能进行定向,但实际生产中,控制点数量不能满足定向要求。在内页求解定向所需控制点的过程叫空中三角测量,其本质就是用尽可能少量的地面控制点,在内页加密出每张像片或每个像对所需要的控制点。另一方面,为了获取更高精度的地面控制点,采用光束法定向,利用光束法平差未知参数的初值,从而进行高精度定向。在竖直航空摄影或已知倾角近似值的倾斜摄影时,相对定向一般采用迭代解法。但是当不知道倾斜摄影中的倾角近似值以及不知道影像的内方位元素时,则采用相对定向的直接解法。进行模型的相对定向,主要是通过找同名点,来确定两张影像之间的关系。
相对定向的目的是为了恢复构成立体像对的两张像片的相对方位,恢复摄影时相邻两影像光束的相互关系,从而使同名光线对对相交,建立被摄物体的几何模型。其数学模型是相应的摄影光线与基线应满足共面条件,观测值为上下视差。
步骤:
选择菜单 “处理→模型定向→相对定向”;
在影像显示窗口内点击右键,选择“自动相对定向”;
自动相对定向完成后,在定向结果窗口检查同名点的上下视差,如果比较大,则比较大,则把它删除或进行调整;编辑完成后,保存,退出。
(3) 绝对定向
相对定向建立的立体模型,是一个以相对定向中选定的像空间辅助坐标系为标准的模型,比例尺也是未知的。要确定立体模型在地面测量坐标系中的正确位置,则需要把模型点的摄影测量坐标转换为地面测量坐标,这一工作需要借助于地面测量坐标为已知值的地面控制点来进行,这个过程称为立体模型的绝对定向。所以绝对定向的目的就是将相对定西后求出的摄影测量坐标变换为地面测量坐标。
模型的绝对定向,要求变换前后的坐标系大致相同。而地面测量坐标是左手直角坐标系,摄影测量坐标系是右手直角坐标系。因此首先应将点名测量坐标系转换为地面摄影测量坐标系。绝对定向前,我们要以手工的方式在当前模型的左右影像上准确地定位一些控制点。
一个像对的两张像片有十二个外方位元素,相对定向求得五个相对定向元素后,要恢复像对的绝对位置还要解求七个绝对定向元素,包括模型的旋转、平移和缩放参数。它需要地面控制点来解求。这种坐标变换,在数学上成为三维空间相似变换。
步骤:
选择菜单“处理→模型定向→绝对定向”;
参照给出的控制点点位图,在相对定向界面中,寻找相应的控制点,对控制点的点位进行精确调整,输入控制点相应的点号,点击“确定”保存。
4、 生成核线影像
非水平方式的核线重采样是基于模型相对定向结果,遵循核线原理对左右原始影像沿核线方向保持X不变在Y方向进行核线重采样,这样所生成的核线影像保持了原始影像同样的信息量和属性。
步骤:
定义作业区;生成核线影→非水平核线;保存;退出;
按照同样的步骤,进行其他模型的内定向、相对定向、绝对定向、核线影像生成,当每个模型的核线影像生成后,则进行影像匹配计算。
5、 影像匹配及匹配后的编辑
选择菜单“处理→影像匹配”项,出现影像匹配计算的进程显示窗口,自动进行影像匹配。
匹配结果的编辑:
6、 生成单模型的DEM
在系统主菜单中,选择“产品→生成DEM→生成DEM(M)”项,屏幕显示计算提示界面,计算完毕后,即建立了当前模型的DEM。
在系统主菜单中,选择“显示→立体显示→透示显示”项,进入显示界面,屏幕显示当前模型的DEM。
7、 多模型的DEM拼接
在系统主菜单中,选择菜单“镶嵌→设置”项,屏幕弹出拼接与镶嵌参数设置对话框。 在系统主菜单中,选择“镶嵌→DEM拼接”项,进入DEM的拼接计算,屏幕弹出拼接进展显示条。当拼接完成后,将显示拼接中误差、总点数、误差分布统计及误差分布图。
8、 生成正射影像
在主界面上,依次单击“产品→生成正射影像”项,系统自动生成正射,单击“显示” →“正射影像”。
三、 实习总结
通过此次实习,了解了使用VirtuoZo 全数字摄影测量系统生产4D产品的过程,熟悉了VirtuoZo 全数字摄影测量系统的使用,加深了对相关知识的理解。
4d产品生产实习是一个综合性很强的实习,它是对所学摄影测量及相关专业的综合应用。该实习在数字摄影测量实习的基础上进行。
通过本次实习,了解到了VirtuoZo 全数字摄影测量系统的功能强大,在4d产品生产实习的过程中自动与半自动的快速生成功能。
实习中需要注意:定义核线范围以将控制点划在作业区范围内为宜,但不能超控太多;其次应结合实际地形情况,如高山地或大比例城区,由于左右像片视差较大,就应适当将核线范围划大些。