基于单片机的数字PID控制直流电机
PWM调压调速器系统设计

所在学院: 机电工程学院
专业班级:
学生姓名:
学生学号:
目 录
PID简介及设计要求............................................................................................................... 1
设计原理与思路......................................................................................................................... 2
设计方案......................................................................................................................................... 4
心得体会......................................................................................................................................... 7
PID简介及设计要求
PID (比例积分微分,英文全称为Proportion Integration Differentiation)控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小来实现自动控制,实际中也有PI和PD控制。简单来说,就是测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的 其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制器其输入e (t)与输出u (t)的关系为 u(t)=kp(e((t)+1/TI∫e(t)dt+TD*de(t)/dt) 式中积分的上下限分别是0和t 因此它的传递函数为:G(s)=U(s)/E(s)=kp(1+1/(TI*s)+TD*s)其中kp为比例系数; TI为积分时间常数; TD为微分时间常数。使用中只需设定三个参数(Kp,Ti和Td)即可。在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。
本次实验就是应用数字PID模型作单片机控制编程,其中P、I、D参数可根据实际情况进行输入调节。利用单片机PWM输出调节施加于直流电机两端的电压,实现对直流电机的PID调压调速功能。
.
设计原理与思路

PID调速设计原理图
如图所示,此为一闭环控制系统:
§反馈量
运用单片机来控制AD芯片来转换模拟电压到数字电压。具体过程如下:实际转速通过压频转换器转换为频率,输入AD转换芯片。直流电机实际转速越大,则AD给定的电压越大,则产生的数字量越大。再将通过AD转换后得到的八位二进制数输入单片机。单片机利用输入的实际频率值和预先设定的值进行比较,通过运算得到一个偏差。
§PID运算
借助单片机实现PID运算。PID调节器通过这个偏差进行PID运算,得到PWM的占空比值。如若实际的转速比期望转速小则这样就相当于加大了PWM的占空比,相当于增大直流电机的给定电压,要是比设定值大,这样也会得到一个偏差,就把这个变差与给定的电压向减,这样就可以减少PWM的占空比,同理则减小直流电机的给定电压,直到下一次PID运算。如此往复反馈调节,直到所得实际转速与期望转速接近,达到调节电动机速度的目的。
§PWM输出调制
PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比。例如,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高。如果占空比为0%,那么高电平时间为0,则没有电压输出。如果占空比为100%,那么输出全部电压。所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节。
§提高控制精度
为提高系统实际调节时的精度,在PID运算过程中所有数据均采用浮点数运算。在单片机应用系统的数据处理过程中,浮点数的结构相对复杂,但它能够以固定的字节长度保持相对精度不变,用较少的字节表示很大的数的范围,便于存储和运算,在处理的数据范围较大和要求精度较高时,采用浮点数。
设计方案
1.硬件介绍
在产生PWM波形我们采用ADC0809芯片和AT89C51两个核心器件。
ADC0809芯片是要外加电压和时钟,当输入不同的电压的时候,就可以把不同的电压模拟量转化为数字值,输入的电压越大,其转换的相应的数字也就会越大,ADC0809芯片有8个通道输入和8个通道输出。其具体的管脚图如下:
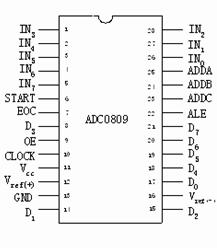
ADC0809芯片管脚图
AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmable and Erasable Read Only Memory)的低电压,高性能CMOS8位微处理器,俗称单片机。AT89C51是一种带2K字节闪烁可编程可擦除只读存储器的单片机。AT89C51单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。外形及引脚排列如图所示
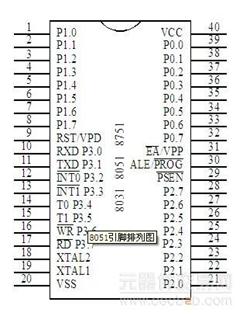
AT89C51芯片管脚图
2.PWM输出程序设计
PWM通过占空比来调节方波高电平和低电平的时间比。
由单片机进行控制的实际过程为:将单片机的P1.0 、P1.2与直流电机的电压输入端相接,利用定时器中断来置位复位P1.0 、P1.2来输出电压,于是我们就可以通过改变定时器初值从而改变定时时间来决定输出方波的占空比。利用T0定时器产生时间为1ms的中断(当单片机晶振频率为12MHz时置初值为0FC18H),此为输出方波的周期。利用T1产生时间为0~1ms的中断(即定时器初值为0FC18H~0FFFFH之间,依据PID调节计算值决定),此为一个方波周期中高电平的时间。
将PID运算后得到的频率值转为定时器的初值,赋予定时器T1,即可改变控制电压的等效值。
%PWM源程序
ORG 0000H
AJMP MAIN
ORG 000BH
AJMP INT0_P
ORG 001BH
AJMP INT1_P
ORG 0030H
MAIN: MOV TMOD,#11H
MOV TH0,#0FCH
MOV TL0,#18H
MOV TH1,#0
MOV TL1,#0
MOV R1,#0FCH
MOV R0,#29H
SETB TR0
SETB TR1
SETB EA
SETB ET0
SETB ET1
SJMP $
INT0_P: MOV TH0,#0FCH
MOV TL0,#18H
MOV TH1,R1
MOV TL1,R0
SETB P1.0
SETB P1.2
SETB TR1
NOP
RETI
INT1_P: CLR P1.0
CLR P1.2
CLR TR1
NOP
RETI
END
3.如何将实际转速采集输入单片机
直流电机在转动的过程中,光电开关会将实际的转速情况采集为电脉冲,再经压频转换器输入AD转换器。而实际输入单片机进行运算的并不是转速对应的频率值,而是经AD转换后的八位二进制数。因此,我们要求得频率值与AD转换后的八位二进制数的对应关系。具体过程如下:
1.将单片机与串行数据显示器相连,利用串行数据显示器将输入单片机的八位二进制数显示。
2.将直流电机与电源连接,启动运行。通过调节转换器上的可变电阻,使显示数据为0FEH时(此为保证数据准确,防止饱和失真),记录下实际转速对应的频率值。
3.计算转速频率值与AD转换后的八位二进制数的对应系数。
4.对PID控制器参数的调节
比例系数Kp对系统性能的影响: (1)对系统的动态性能影响:Kp加大,将使系统响应速度加快,Kp偏大时,系统振荡次数增多,调节时间加长;;Kp太小又会使系统的响应速度缓慢。Kp的选择以输出响应产生4:1衰减过程为宜。 (2)对系统的稳态性能影响:在系统稳定的前提下,加大Kp可以减少稳态误差,但不能消除稳态误差。因此Kp的整定主要依据系统的动态性能。
积分时间TI对系统性能的影响: (1)对系统的动态性能影响:积分控制通常影响系统的稳定性。TI太小,系统可能不稳定,且振荡次数较多;TI太大,对系统的影响将削弱;当TI较适合时,系统的过渡过程特性比较理想。 (2)对系统的稳态性能影响:积分控制有助于消除系统稳态误差,提高系统的控制精度,但若TI太大,积分作用太弱,则不能减少余差。
微分时间TD对系统性能的影响: (1)对系统的动态性能影响:微分时间TD的增加即微分作用的增加可以改善系统的动态特性,如减少超调量,缩短调节时间等。适当加大比例控制,可以减少稳态误差,提高控制精度。但TD值偏大或偏小都会适得其反。另外微分作用有可能放大系统的噪声,降低系统的抗干扰能力。 (2)对系统的稳态性能影响:微分环节的加入,可以在误差出现或变化瞬间,按偏差变化的趋向进行控制。它引进一个早期的修正作用,有助于增加系统的稳定性。
PID控制器的参数必须根据工程问题的具体要求来考虑。一般来说,要同时满足这些要求是很难做到的,必须根据系统的具体情况,满足主要的性能指标,同时兼顾其它方面的要求。
心得体会
本次实验完成了基于单片机的数字PID控制器的设计,并通过实验过程对PID参数进行调节,实现了对直流电机的调压调速过程。
世上无难事,只怕有心人。从最初接触到设计题目时些许的茫然到最终实验报告的完成,这其间并不是一帆风顺。在最初阶段查阅资料中,程序设计过程中,对PID参数的调节过程中我都遇到了一些问题。通过与张老师和周围的同学交流讨论,在解决问题的同时,我不仅增长了知识也提高了发现问题解决问题的能力。此时,站在“山顶”回看来路,虽然付出的过程充满了坎坷,但成功的完成设计要求也给了我很大的鼓舞与前进的动力。而在今后的人生与工作中还有很多座大山等着我。
同时,细节决定成败!在程序设计的过程中,我遇到了平常容易忽视的一些问题,诸如数据存储器空间的复用,语句的书写错误,参数的符号错误等等。俗话说“千里之堤毁于蚁穴”,而这些看似细小的问题却导致了实验的失败,反复更正花费了大量时间。对于我们做工程的人,细节不容忽视!这也是我经过本次实验我的亲身认知。
此外,我想真诚地感谢张老师!在学习的过程中,一个方向比一个解答更为重要!张老师为我们指明了方向,而“路”完全靠我们自己去走。在提高学生自主性的同时,也增加了学生的学习与思考的动力。无论实在程序设计过程中还是实验参数调节过程中与同学讨论,都使我受益匪浅。
附录:PID程序
EK0 EQU 40H
EK1 EQU 43H
EK2 EQU 46H
KPP EQU 60H
KII EQU 63H
KDD EQU 66H
PP EQU 76H
II EQU 79H
DD EQU 7CH
AIM EQU 50H
UK0 EQU 70H
UK1 EQU 73H
ORG 0000H
AJMP MAIN
ORG 000BH
AJMP INT0_P
ORG 001BH
AJMP INT1_P
ORG 0030H
MAIN: LCALL SET0
SETB TR0
SETB TR1
SETB EA
SETB ET0
SETB ET1
SJMP $
INT0_P: INC 4FH
MOV R0,#4FH
CJNE @R0,#20,UNDO
LCALL INPUT
MOV 4FH,#0
UNDO: MOV TH0,#0FCH
MOV TL0,#18H
MOV TH1,4DH
MOV TL1,4EH
SETB P1.0
SETB P1.2
SETB TR1
NOP
RETI
INT1_P: CLR P1.0
CLR P1.2
CLR TR1
NOP
RETI
SET0: MOV 73H,#0
MOV 74H,#0
MOV 75H,#0;%UK1
MOV R0,#UK1
LCALL BTOF
MOV 40H,#00H
MOV 41H,#00H
MOV 42H,#0
MOV R0,#EK0
LCALL BTOF
MOV 43H,#00H
MOV 44H,#00H
MOV 45H,#0;%EK1
MOV R0,#EK1
LCALL BTOF
MOV 46H,#0
MOV 47H,#0
MOV 48H,#0;%EK2
MOV R0,#EK2
LCALL BTOF
MOV 60H,#7FH
MOV 61H,#10H
MOV 62H,#0;%KPP
MOV R0,#KPP
LCALL BTOF
MOV 63H,#7FH
MOV 64H,#10H
MOV 65H,#0;%KII
MOV R0,#KII
LCALL BTOF
MOV 66H,#00H
MOV 67H,#00H
MOV 68H,#0;%KDD
MOV R0,#KDD
LCALL BTOF
MOV 50H,#03H
MOV 51H,#20H
MOV 52H,#00H;%AIM频率期望值给定%%%%%%%%此值根据实际需要输入%%%%%%
MOV R0,#AIM
LCALL BTOF
MOV 53H,#01H
MOV 54H,#12H
MOV 55H,#90H;%求取采样的八位二进制数与对应频率值之间的系数根据实际计算所得
MOV R0,#53H
LCALL BTOF
MOV TMOD,#11H
MOV TH0,#0FCH
MOV TL0,#18H
MOV TH1,#0
MOV TL1,#0
MOV 4DH,#0FCH
MOV 4EH,#29H;%置定时器初值
RET
INPUT: MOV DPTR,#0FEF0H
MOV A,#0
MOVX @DPTR,A
WAIT: JB P3.3,WAIT
MOVX A,@DPTR;%实际值读入
MOV A,#0FFH;
MOV 57H,A
MOV 56H,#8
MOV 58H,#0;阶码赋值8,将AD读入的八位二进制转为浮点数
MOV R0,#56H
MOV R1,#53H;求得八位二进制数对应的频率
LCALL FMUL
;%计算偏差
MOV R1,#EK1
MOV R0,#EK2
LCALL FMOV
MOV R1,#EK0
MOV R0,#EK1
LCALL FMOV
MOV R1,#AIM
MOV R0,#EK0
LCALL FMOV
MOV R1,#56H
LCALL FSUB
;%PP计算
MOV R1,#EK0
MOV R0,#PP
LCALL FMOV
MOV R1,#EK1
LCALL FSUB
MOV R1,#KPP
LCALL FMUL
;%II计算
MOV R0,#II
MOV R1,#EK0
LCALL FMOV
MOV R1,#KII
LCALL FMUL
;%DD;
MOV R1,#EK1
MOV R0,#4AH
LCALL FMOV
MOV A,4AH
ADD A,#1
MOV 4AH,A;%阶码加一即原数乘以2;
MOV R1,#EK0
MOV R0,#DD
LCALL FMOV
MOV R1,#4AH
LCALL FSUB
MOV R1,#EK2
LCALL FADD
MOV R1,#KDD
LCALL FMUL
;%PID
MOV R0,#UK1
MOV R1,#PP
LCALL FADD
MOV R1,#II
LCALL FADD
MOV R1,#DD
LCALL FADD
MOV R1,#UK1
MOV R0,#UK0;检验UK1是否在0~5之间;
LCALL FMOV
;%对UK判定处理
MOV R0,#UK0
LCALL FSGN
CJNE A,#1,SETZERO
MOV 4AH,#01H
MOV 4BH,#50H
MOV 4CH,#00H
MOV R0,#4AH
LCALL BTOF
MOV R1,#UK0
LCALL FCMP
JNC SETT
MOV R0,#UK0
MOV R1,#4AH
LCALL FMOV
LJMP SETT
SETZERO:LCALL FCLR
;%用UK计算T1的初值
SETT: MOV 4AH,#03H
MOV 4BH,#20H
MOV 4CH,#00H
MOV R0,#4AH
LCALL BTOF
MOV R1,#UK0
LCALL FMUL
LCALL FTOD
JC ZANDX
CLR C
CLR A
SUBB A,4BH
MOV 4BH,A
CLR A
SUBB A,4AH
MOV 4AH,A
CJNE A,#0FCH,FUZHI
CLR C
MOV A,#29H
SUBB A,4BH
JC FUZHI
MOV 4BH,#29H
LJMP FUZHI
ZANDX: CLR C
CLR A
SUBB A,4AH
MOV 4BH,A
MOV 4AH,#0FFH
FUZHI: MOV 4DH,4AH
MOV 4EH,4BH
RET
;浮点数格式化
FSDT: LCALL MVR0 ;将待格式化操作数传送到第一工作区中
LCALL RLN ;通过左规完成格式化
LJMP MOV0 ;将已格式化浮点操作数传回到[R0]中
;FADD 功能:浮点数加法
FADD: CLR F0 ;设立加法标志
SJMP AS ;计算代数和
;FSUB 功能:浮点数减法
FSUB: SETB F0 ;设立减法标志
AS: LCALL MVR1 ;计算代数和?先将[R1]传送到第二工作区
MOV C,F0 ;用加减标志来校正第二操作数的有效符号
RRC A
XRL A,@R1
MOV C,ACC.7
ASN: MOV 1EH,C ;将第二操作数的有效符号存入位1EH中
XRL A,@R0 ;与第一操作数的符号比较
RLC A
MOV F0,C ;保存比较结果
LCALL MVR0 ;将[R0]传送到第一工作区中
LCALL AS1 ;在工作寄存器中完成代数运算
MOV0: INC R0 ;将结果传回到[R0]中的子程序入口
INC R0
MOV A,R4 ;传回尾数的低字节
MOV @R0,A
DEC R0
MOV A,R3 ;传回尾数的高字节
MOV @R0,A
DEC R0
MOV A,R2 ;取结果的阶码
MOV C,1FH ;取结果的数符
MOV ACC.7,C ;拼入阶码中
MOV @R0,A
CLR ACC.7 ;不考虑数符
CLR OV ;清除溢出标志
CJNE A,#3FH,MV01;阶码是否上溢?
SETB OV ;设立溢出标志
MV01: MOV A,@R0 ;取出带数符的阶码
RET
MVR0: MOV A,@R0 ;将[R0]传送到第一工作区中的子程序
MOV C,ACC.7 ;将数符保存在位1FH中
MOV 1FH,C
MOV C,ACC.6 ;将阶码扩充为8bit补码
MOV ACC.7,C
MOV R2,A ;存放在R2中
INC R0
MOV A,@R0 ;将尾数高字节存放在R3中
MOV R3,A
INC R0
MOV A,@R0 ;将尾数低字节存放在R4中
MOV R4,A
DEC R0 ;恢复数据指针
DEC R0
RET
MVR1: MOV A,@R1 ;将[R1]传送到第二工作区中的子程序
MOV C,ACC.7 ;将数符保存在位1EH中
MOV 1EH,C
MOV C,ACC.6 ;将阶码扩充为8bit补码
MOV ACC.7,C
MOV R5,A ;存放在R5中
INC R1
MOV A,@R1 ;将尾数高字节存放在R6中
MOV R6,A
INC R1
MOV A,@R1 ;将尾数低字节存放在R7中
MOV R7,A
DEC R1 ;恢复数据指针
DEC R1
RET
AS1: MOV A,R6 ;读取第二操作数尾数高字节
ORL A,R7
JZ AS2 ;第二操作数为零,不必运算
MOV A,R3 ;读取第一操作数尾数高字节
ORL A,R4
JNZ EQ1
MOV A,R6 ;第一操作数为零,结果以第二操作数为准
MOV R3,A
MOV A,R7
MOV R4,A
MOV A,R5
MOV R2,A
MOV C,1EH
MOV 1FH,C
AS2: RET
EQ1: MOV A,R2 ;对阶,比较两个操作数的阶码
XRL A,R5
JZ AS4 ;阶码相同,对阶结束
JB ACC.7,EQ3;阶符互异
MOV A,R2 ;阶符相同,比较大小
CLR C
SUBB A,R5
JC EQ4
EQ2: CLR C ;第二操作数右规一次
MOV A,R6 ;尾数缩小一半
RRC A
MOV R6,A
MOV A,R7
RRC A
MOV R7,A
INC R5 ;阶码加一
ORL A,R6 ;尾数为零否?
JNZ EQ1 ;尾数不为零,继续对阶
MOV A,R2 ;尾数为零,提前结束对阶
MOV R5,A
SJMP AS4
EQ3: MOV A,R2 ;判断第一操作数阶符
JNB ACC.7,EQ2;如为正,右规第二操作数
EQ4: CLR C
LCALL RR1 ;第一操作数右规一次
ORL A,R3 ;尾数为零否?
JNZ EQ1 ;不为零,继续对阶
MOV A,R5 ;尾数为零,提前结束对阶
MOV R2,A
AS4: JB F0,AS5 ;尾数加减判断
MOV A,R4 ;尾数相加
ADD A,R7
MOV R4,A
MOV A,R3
ADDC A,R6
MOV R3,A
JNC AS2
LJMP RR1 ;有进位,右规一次
AS5: CLR C ;比较绝对值大小
MOV A,R4
SUBB A,R7
MOV B,A
MOV A,R3
SUBB A,R6
JC AS6
MOV R4,B ;第一尾数减第二尾数
MOV R3,A
LJMP RLN ;结果规格化
AS6: CPL 1FH ;结果的符号与第一操作数相反
CLR C ;结果的绝对值为第二尾数减第一尾数
MOV A,R7
SUBB A,R4
MOV R4,A
MOV A,R6
SUBB A,R3
MOV R3,A
RLN: MOV A,R3 ;浮点数规格化
ORL A,R4 ;尾数为零否?
JNZ RLN1
MOV R2,#0C1H;阶码取最小值
RET
RLN1: MOV A,R3
JB ACC.7,RLN2;尾数最高位为一否?
CLR C ;不为一,左规一次
LCALL RL1
SJMP RLN ;继续判断
RLN2: CLR OV ;规格化结束
RET
RL1: MOV A,R4 ;第一操作数左规一次
RLC A ;尾数扩大一倍
MOV R4,A
MOV A,R3
RLC A
MOV R3,A
DEC R2 ;阶码减一
CJNE R2,#0C0H,RL1E;阶码下溢否?
CLR A
MOV R3,A ;阶码下溢,操作数以零计
MOV R4,A
MOV R2,#0C1H
RL1E: CLR OV
RET
RR1: MOV A,R3 ;第一操作数右规一次
RRC A ;尾数缩小一半
MOV R3,A
MOV A,R4
RRC A
MOV R4,A
INC R2 ;阶码加一
CLR OV ;清溢出标志
CJNE R2,#40H,RR1E;阶码上溢否?
MOV R2,#3FH ;阶码溢出
SETB OV
RR1E: RET
;FMUL 功能:浮点数乘法
FMUL: LCALL MVR0 ;将[R0]传送到第一工作区中
MOV A,@R0
XRL A,@R1 ;比较两个操作数的符号
RLC A
MOV 1FH,C ;保存积的符号
LCALL MUL0 ;计算积的绝对值
LJMP MOV0 ;将结果传回到[R0]中
MUL0: LCALL MVR1 ;将[R1]传送到第二工作区中
MUL1: MOV A,R3 ;第一尾数为零否?
ORL A,R4
JZ MUL6
MOV A,R6 ;第二尾数为零否?
ORL A,R7
JZ MUL5
MOV A,R7 ;计算R3R4×R6R7-→R3R4
MOV B,R4
MUL AB
MOV A,B
XCH A,R7
MOV B,R3
MUL AB
ADD A,R7
MOV R7,A
CLR A
ADDC A,B
XCH A,R4
MOV B,R6
MUL AB
ADD A,R7
MOV R7,A
MOV A,B
ADDC A,R4
MOV R4,A
CLR A
RLC A
XCH A,R3
MOV B,R6
MUL AB
ADD A,R4
MOV R4,A
MOV A,B
ADDC A,R3
MOV R3,A
JB ACC.7,MUL2;积为规格化数否?
MOV A,R7 ;左规一次
RLC A
MOV R7,A
LCALL RL1
MUL2: MOV A,R7
JNB ACC.7,MUL3
INC R4
MOV A,R4
JNZ MUL3
INC R3
MOV A,R3
JNZ MUL3
MOV R3,#80H
INC R2
MUL3: MOV A,R2 ;求积的阶码
ADD A,R5
MD: MOV R2,A ;阶码溢出判断
JB ACC.7,MUL4
JNB ACC.6,MUL6
MOV R2,#3FH ;阶码上溢,设立标志
SETB OV
RET
MUL4: JB ACC.6,MUL6
MUL5: CLR A ;结果清零(因子为零或阶码下溢)
MOV R3,A
MOV R4,A
MOV R2,#41H
MUL6: CLR OV
RET
;FCLR 功能:浮点数清零
FCLR: INC R0
INC R0
CLR A
MOV @R0,A
DEC R0
MOV @R0,A
DEC R0
MOV @R0,#41H
RET
;FMOV 功能:浮点数传送
FMOV: INC R0
INC R0
INC R1
INC R1
MOV A,@R1
MOV @R0,A
DEC R0
DEC R1
MOV A,@R1
MOV @R0,A
DEC R0
DEC R1
MOV A,@R1
MOV @R0,A
RET
;FCMP 功能:浮点数代数值比较(不影响待比较操作数)
FCMP: MOV A,@R0 ;数符比较
XRL A,@R1
JNB ACC.7,CMP2
MOV A,@R0 ;两数异号,以[R0]数符为准
RLC A
MOV A,#0FFH
RET
CMP2: MOV A,@R1 ;两数同号,准备比较阶码
MOV C,ACC.6
MOV ACC.7,C
MOV B,A
MOV A,@R0
MOV C,ACC.7
MOV F0,C ;保存[R0]的数符
MOV C,ACC.6
MOV ACC.7,C
CLR C ;比较阶码
SUBB A,B
JZ CMP6
RLC A ;取阶码之差的符号
JNB F0,CMP5
CPL C ;[R0]为负时,结果取反
CMP5: MOV A,#0FFH ;两数不相等
RET
CMP6: INC R0 ;阶码相同时,准备比较尾数
INC R0
INC R1
INC R1
CLR C
MOV A,@R0
SUBB A,@R1
MOV B,A ;保存部分差
DEC R0
DEC R1
MOV A,@R0
SUBB A,@R1
DEC R0
DEC R1
ORL A,B ;生成是否相等信息
JZ CMP7
JNB F0,CMP7
CPL C ;[R0]为负时,结果取反
CMP7: RET
;FSGN 功能:浮点符号函数
FSGN: INC R0 ;读尾数
MOV A,@R0
INC R0
ORL A,@R0
DEC R0
DEC R0
JNZ SGN
RET ;尾数为零,结束
SGN: MOV A,@R0 ;读取操作数的阶码
RLC A ;取数符
MOV A,#1 ;按正数初始化
JNC SGN1 ;是正数,结束
MOV A,#0FFH ;是负数,改变标志
SGN1: RET
;DTOF 功能:双字节十六进制定点数转换成格式化浮点数
DTOF: MOV R2,A ;按整数的位数初始化阶码
MOV A,@R0 ;将定点数作尾数
MOV R3,A
INC R0
MOV A,@R0
MOV R4,A
DEC R0
LCALL RLN ;进行规格化
LJMP MOV0 ;传送结果到[R0]中
;FTOD 功能:格式化浮点数转换成双字节定点数
FTOD: LCALL MVR0 ;将[R0]传送到第一工作区
MOV A,R2
JZ FTD4 ;阶码为零,纯小数
JB ACC.7,FTD4;阶码为负,纯小数
SETB C
SUBB A,#10H
JC FTD1
SETB OV ;阶码大于16,溢出
RET
FTD1: SETB C
MOV A,R2
SUBB A,#8 ;阶码大于8否?
JC FTD3
FTD2: MOV B,#10H ;阶码大于8,按双字节整数转换
LCALL FTD8
SETB F0 ;设立双字节整数标志
CLR C
CLR OV
RET
FTD3: MOV B,#8 ;按一字节整数一字节小数转换
LCALL FTD8
SETB C ;设立一字节整数一字节小数标志
CLR F0
CLR OV
RET
FTD4: MOV B,#0 ;按纯小数转换
LCALL FTD8
CLR OV ;设立纯小数标志
CLR F0
CLR C
RET
FTD8: MOV A,R2 ;按规定的整数位数进行右规
CJNE A,B,FTD9
MOV A,R3 ;将双字节结果传送到[R0]中
MOV @R0,A
INC R0
MOV A,R4
MOV @R0,A
DEC R0
RET
FTD9: CLR C
LCALL RR1 ;右规一次
SJMP FTD8
;BTOF 功能:浮点BCD码转换成格式化浮点数
BTOF: INC R0 ;判断是否为零?
INC R0
MOV A,@R0
MOV R7,A
DEC R0
MOV A,@R0
MOV R6,A
DEC R0
ORL A,R7
JNZ BTF0
MOV @R0,#41H;为零,转换结束?
RET
BTF0: MOV A,@R0
MOV C,ACC.7
MOV 1DH,C ;保存数符?
CLR 1FH ;以绝对值进行转换?
MOV C,ACC.6 ;扩充阶码为八位?
MOV ACC.7,C
MOV @R0,A
JNC BTF1
ADD A,#19 ;是否小于1E-19?
JC BTF2
MOV @R0,#41H;小于1E-19时以0计?
INC R0
MOV @R0,#0
INC R0
MOV @R0,#0
DEC R0
DEC R0
RET
BTF1: SUBB A,#19
JC BTF2
MOV A,#3FH ;大于1E19时封顶?
MOV C,1DH
MOV ACC.7,C
MOV @R0,A
INC R0
MOV @R0,#0FFH
INC R0
MOV @R0,#0FFH
DEC R0
DEC R0
RET
BTF2: CLR A ;准备将BCD码尾数转换成十六进制浮点数?
MOV R4,A
MOV R3,A
MOV R2,#10H ;至少两个字节?
BTF3: MOV A,R7
ADD A,R7
DA A
MOV R7,A
MOV A,R6
ADDC A,R6
DA A
MOV R6,A
MOV A,R4
RLC A
MOV R4,A
MOV A,R3
RLC A
MOV R3,A
DEC R2
JNB ACC.7,BTF3;直到尾数规格化?
MOV A,R6 ;四舍五入?
ADD A,#0B0H
CLR A
ADDC A,R4
MOV R4,A
CLR A
ADDC A,R3
MOV R3,A
JNC BTF4
MOV R3,#80H
INC R2
BTF4: MOV DPTR,#BTFL;准备查表得到十进制阶码对应的浮点数?
MOV A,@R0
ADD A,#19 ;计算表格偏移量?
MOV B,#3
MUL AB
ADD A,DPL
MOV DPL,A
JNC BTF5
INC DPH
BTF5: CLR A ;查表?
MOVC A,@A+DPTR
MOV C,ACC.6
MOV ACC.7,C
MOV R5,A
MOV A,#1
MOVC A,@A+DPTR
MOV R6,A
MOV A,#2
MOVC A,@A+DPTR
MOV R7,A
LCALL MUL1 ;将阶码对应的浮点数和尾数对应的浮点数相乘?
MOV C,1DH ;取出数符?
MOV 1FH,C
LJMP MOV0 ;传送转换结果?
;FTOB 功能:格式化浮点数转换成浮点BCD码
FTOB: INC R0
MOV A,@R0
INC R0
ORL A,@R0
DEC R0
DEC R0
JNZ FTB0
MOV @R0,#41H
RET
FTB0: MOV A,@R0
MOV C,ACC.7
MOV 1DH,C
CLR ACC.7
MOV @R0,A
LCALL MVR0
MOV DPTR,#BFL0;绝对值大于或等于1时的查表起点?
MOV B,#0 ;十的0次幂?
MOV A,R2
JNB ACC.7,FTB1
MOV DPTR,#BTFL;绝对值小于1E-6时的查表起点?
MOV B,#0EDH ;十的-19次幂?
ADD A,#16
JNC FTB1
MOV DPTR,#BFLN;绝对值大于或等于1E-6时的查表起点?
MOV B,#0FAH ;十的-6次幂?
FTB1: CLR A ;查表,找到一个比待转换浮点数大的整数幂?
MOVC A,@A+DPTR
MOV C,ACC.6
MOV ACC.7,C
MOV R5,A
MOV A,#1
MOVC A,@A+DPTR
MOV R6,A
MOV A,#2
MOVC A,@A+DPTR
MOV R7,A
MOV A,R5 ;和待转换浮点数比较?
CLR C
SUBB A,R2
JB ACC.7,FTB2;差为负数?
JNZ FTB3
MOV A,R6
CLR C
SUBB A,R3
JC FTB2
JNZ FTB3
MOV A,R7
CLR C
SUBB A,R4
JC FTB2
JNZ FTB3
MOV R5,B ;正好是表格中的数?
INC R5 ;幂加一?
MOV R6,#10H ;尾数为0?1000?
MOV R7,#0
SJMP FTB6 ;传送转换结果?
FTB2: INC DPTR ;准备表格下一项?
INC DPTR
INC DPTR
INC B ;幂加一?
SJMP FTB1 ;
FTB3: PUSH B ;保存幂值?
LCALL DIV3 ;相除,得到一个二进制浮点数的纯小数?
FTB4: MOV A,R2 ;取阶码?
JZ FTB5 ;为零吗?
CLR C
LCALL RR1 ;右规?
SJMP FTB4
FTB5: POP ACC ;取出幂值?
MOV R5,A ;作为十进制浮点数的阶码?
LCALL HB2 ;转换尾数的十分位和百分位?
MOV R6,A
LCALL HB2 ;转换尾数的千分位和万分位?
MOV R7,A
MOV A,R3 ;四舍五入?
RLC A
CLR A
ADDC A,R7
DA A
MOV R7,A
CLR A
ADDC A,R6
DA A
MOV R6,A
JNC FTB6
MOV R6,#10H
INC R5
FTB6: INC R0 ;存放转换结果?
INC R0
MOV A,R7
MOV @R0,A
DEC R0
MOV A,R6
MOV @R0,A
DEC R0
MOV A,R5
MOV C,1DH ;取出数符?
MOV ACC.7,C
MOV @R0,A
RET
HB2: MOV A,R4 ;尾数扩大100倍?
MOV B,#100
MUL AB
MOV R4,A
MOV A,B
XCH A,R3
MOV B,#100
MUL AB
ADD A,R3
MOV R3,A
JNC HB21
INC B
HB21: MOV A,B ;将整数部分转换成BCD码?
MOV B,#10
DIV AB
SWAP A
ORL A,B
RET
BTFL: DB 41H,0ECH,1EH ;1.0000E-19
DB 45H,93H,93H ;1.0000E-18
DB 48H,0B8H,78H ;1.0000E-17
DB 4BH,0E6H,96H ;1.0000E-16
DB 4FH,90H,1DH ;1.0000E-15
DB 52H,0B4H,25H ;1.0000E-14
DB 55H,0E1H,2EH ;1.0000E-13
DB 59H,8CH,0BDH ;1.0000E-12
DB 5CH,0AFH,0ECH ;1.0000E-11
DB 5FH,0DBH,0E7H ;1.0000E-10
DB 63H,89H,70H ;1.0000E-9
DB 66H,0ABH,0CCH ;1.0000E-8
DB 69H,0D6H,0C0H ;1.0000E-7
BFLN: DB 6DH,86H,38H ;1.0000E-6
DB 70H,0A7H,0C6H ;1.0000E-5
DB 73H,0D1H,0B7H ;1.0000E-4
DB 77H,83H,12H ;1.0000E-3
DB 7AH,0A3H,0D7H ;1.0000E-2
DB 7DH,0CCH,0CDH ;1.0000E-1
BFL0: DB 1,80H,00H ;1.0000
DB 4,0A0H,00H ;1.0000E1
DB 7,0C8H,00H ;1.0000E2
DB 0AH,0FAH,00H ;1.0000E3
DB 0EH,9CH,40H ;1.0000E4
DB 11H,0C3H,50H ;1.0000E5
DB 14H,0F4H,24H ;1.0000E6
DB 18H,98H,97H ;1.0000E7
DB 1BH,0BEH,0BCH ;1.0000E8
DB 1EH,0EEH,6BH ;1.0000E9
DB 22H,95H,03H ;1.0000E10
DB 25H,0BAH,44H ;1.0000E11
DB 28H,0E8H,0D5H ;1.0000E12
DB 2CH,91H,85H ;1.0000E13
DB 2FH,0B5H,0E6H ;1.0000E14
DB 32H,0E3H,60H ;1.0000E15
DB 36H,8EH,1CH ;1.0000E16
DB 39H,31H,0A3H ;1.0000E17
DB 3CH,0DEH,0BH ;1.0000E18
DB 40H,8AH,0C7H ;1.0000E19