论文题目
开题报告
1.研究背景及意义
货物装车后,车辆停留在水平直线上,车辆纵中心线与线路中心线处于同一垂直平面上(简称处于理想状态)时,货物的任何部位超出机车车辆限界基本轮廓,称为超限货物。货物装车后,车辆行径半径为300m的曲线时,货物任何部位的计算宽度超限时,亦为超限货物[1]。超限货物外形尺寸庞大,在运输中需要较大的空间。其运量在铁路货物总运量中所占份额不大,但随着我国国民经济的迅速发展,特别是改革开放以来,冶金、电力、石油化工及军事装备等事业呈现了高速发展的局面,铁路超限货物运输需求也日益增加。因此,安全、迅速、经济、便利地运送超限货物,已经成为铁路运输的一项十分重要的任务。
车辆是由车体、转向架构架、轮对及弹簧悬挂装置等部件共同组成的一个多自由度系统。当车辆在线路上运行时,由于轮轨之间的相互作用,在各种垂向和横向力的作用下,车辆系统会产生垂向和横向振动[2,3,4]。车辆系统的横向振动偏移量将减小车辆(货物)与建筑限界的横向距离。在实际工作中,超限车与建筑限界及邻线车辆的横向水平间隙是影响超限车运行的主要因素,因此,正确地确定车辆横向偏移量是研究超限车运行条件和划分各级超限限界的基础。
2.国内外研究现状
2.1国外研究现状
铁路货物运输在各个国家的交通运输研究中的地位不同,重视程度也不同。美国的公路设施比较发达,公路的承载能力高,大件货物运输主要依靠公路运输,因此美国对于铁路超限货物运输的研究比较少;日本的铁路线路较短,铁路运输的重点为旅客运输,货物运输量比较少,因此日本对于铁路超限货物运输的研究也比较少;前苏联在铁路运输领域的研究比较深入,对我国铁路运输理论和实践产生了较大的影响,我国在铁路超限货物运输领域的部分理论和运输要求等都借鉴于前苏联。
在车辆偏移计算方面,前苏联和东欧各国将在线路上由于车辆走行部横向游间而产生的横向偏移量按有关各国铁路平车在直线和曲线上偏移量的大小(取决于车辆长度和销距)分为三种类型,并将偏移量分别取为115、140、170mm三个值。对于车辆运行中由于车辆振动、倾斜所产生的横向振动偏移量按高度分四段,并分别取值:高度为1200—3800mm时取100mm、高度为3801—4300mm时取110mm、高度为4301—4650mm时取120mm、高度为4651—4750mm时取125mm[5]。
下面主要介绍国际铁路联盟组织在超限货物的横向偏移量方面的规定。
国际铁路联盟(UIC)对铁路限界有较为详细的规定,相应的规程为系列规程(UIC505-1至UIC505-5)[6,7,8,9,10]。在UIC规程中,提出了基准轮廓线的概念,给出了横向游间的计算公式,分析了车辆在线路上的几种停留状态,对垂直位移和车辆停留状态下的横向位移计算方法进行了详细分析,在此基础上根据车辆的垂直位移、横向位移等可确定机车车辆限界[11,12,13]。其中,1995年以前的UIC505-1至UIC505-3分别对国际联运动力车的动态限界、国际联运客车和行李车的动态限界、国际铁路运输中使用的货车动态限界计算方法等进行了详细的规定;UIC505-4详细分析了应用505系列规程的动态限界对建筑物与线路间及各线路相互间定位的影响;UIC505-5详细阐述了UIC505-1至UIC505-4通用基础条件规程的编制和条文的说明。1995年,国际铁路联盟发布公告,声明原有的UIC505-1至UIC505-3共三个规程由新制定的UIC505-1取代,UIC505-4、UIC505-5继续使用。
修改后的UIC505-1与原有的三个规程在理论上没有重大修订,但对机车车辆限界、动态限界求算方法进行了一般性的规定,并对不同类型车辆的限界进行了计算。
国际铁路联盟(UIC)计算车辆横向偏移量选取的车辆最不利位置和计算方法比较全面,在确定车辆运行所需空间时值得借鉴。对于车辆运行中产生的横向振动偏移量则考虑在安全裕量中,具体数值由各个国家自己确定。
2.2国内研究现状
国内在研究超限车的运行条件时,在确定超限货物横向偏移量方面,主要是综合考虑线路工况和列车运行速度的影响,研究不利工况条件下车辆的横向最大偏移量。目前,国内对货车的研究较少。
鞠殿明、韩梅、郭维鸿等人在《超限车侧滚振动偏移量的确定方法及影响因素分析》中,建立计算超限车侧滚振动偏移量的数学模型,分析计算了轨面水平不平顺和旁承间隙变化引起的车体横向偏移量,以及各种因素对侧滚振动偏移量的影响,并通过实例验证了模型的可靠性[14]。
韩梅在《铁路超限货物运输理论及其应用研究》中,从铁路超限货物运输的特殊性、铁路限界分析入手,探讨我国铁路限界的特点,并提出改进后的机车车辆限界轮廓尺寸,重新确定判定货物是否超限的依据,并对判定货物是否超限及其超限等级的方法进行修订,建立车辆横向振动偏移量的数学模型并采用仿真软件进行计算,并在此基础上,提出确定超限车运行条件的数学模型,重新确定超限车的运行条件,对超限限界进行合理划分。在车辆横向振动偏移量的研究方面,选用的是N17AK货车车型,标记载重60t,主要阐述了车辆横向振动偏移量对超限货物运输的影响,分析车辆横向振动偏移量产生的原因及影响因素;通过车辆结构分析及车辆系统的受力分析,建立车辆系统横向随机振动的数学模型;重点分析并选定不利的计算工况及轨道谱,在此基础上采用SIMPACK多刚体系统动力学软件进行仿真计算,比较分析不同工况条件下的车辆横向振动偏移量计算结果,确定超限货物运输中车辆横向振动偏移量的最不利工况[15]。
鞠殿明的《超限货物运输基本理论及其应用的研究》和郭维鸿在《关于改革超限货物计算宽度先行公式的建议》中,都分析了影响货车横向振动偏移量的因素,建立了数学模型,并进行了求解,具有一定的参考价值[16,17]。
长期以来,我国在车辆横向振动偏移量的研究方面并不系统,并未研究车辆的横向振动偏移量在不同线路情况下、不同工况下的规律。本次研究选用NX70H型共用车,以车辆系统动力学理论为基础,采用SIMPACK的仿真手段,建立NX70H的虚拟样车模型,研究NX70H型共用车的振动偏移量与装载工况、线路条件及运行速度等的关系及变化规律,为超限车运行条件提供理论依据。
3.理论综述
3.1货车的选型
从20##年起,我国新造铁路货车全部采用70t级新型货车。70t级新型铁路货车是提高货运能力的一个经济、有效的现实途径[18]:
(1)目前全路日均装车在10万辆以上,如果铁路货车从60t车变为70t车,每辆车即可多运10 t,则意味着全路一天货物运量将增加100万吨,一年就增加3.6亿吨。
(2)可在既有站线长度850m条件下开行5000t重载列车,适应我国既有铁路条件和编组场作业条件,既可实现单列运载重量达到5000t的要求,又为国家节省了大量的线桥、站线建设改造资金。
我国超限货物主要采用普通平车和长大货物车装运,从发展趋势看,70t级平车保有量所占比例不断提高,其中NX70H型平车将成为主型平车,因此,本文选用标记载重量为70t的NX70H型平车作为研究对象。
NX70H型平车为标准轨距、载重70t、具有装运多种货物功能的四轴平车,可供装载符合ISO 668:1995《系列1 集装箱—分类、尺寸和额定重量》所规定的1AAA、1AA、1A、1AX、1CC、1C、1CX集装箱及45英尺、48英尺和50英尺国际非标箱,还可供装运钢材、汽车、拖拉机、成箱货物及大型混凝土桥梁等货物。NX70H型平车主要由底架、地板、集装箱锁闭装置、端门、制动装置、车钩缓冲装置、转向架等部分组成[19]。
3.2转K5型转向架的结构特点
目前我国铁路主型货车转向架有转K2、转K4、转K5和转K6型转向架。在这四种主型货车转向架中,依据轴型的不同又可分为两类:转K2和转K4型转向架轴型为RD轴,设计轴重21t,主要用于载重60t级的各型提速货车;转K5和转K6型转向架轴型为RE轴,设计轴重为25t,主要用于载重70t级的各型提速货车及载重为76t和80t的各型运煤专用敞车。转K5和转K6型转向架均为铸钢三大件式货车转向架,不同的是,转K5型转向架采用摇动台机构提高横向柔度和抗菱刚度,转K6型转向架是采用侧架弹性下交叉支撑装置来提高转向架抗菱刚度[19]。
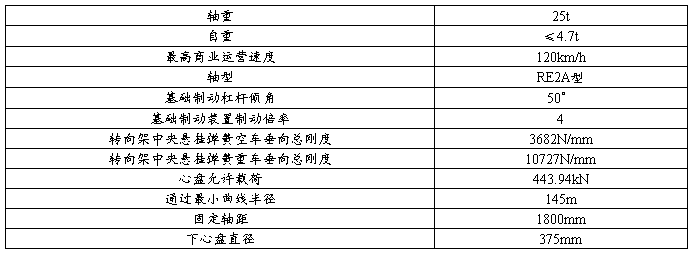
NX70H型平车采用转K5型转向架,主要由轮对和轴承装置、摇枕、侧架、弹性悬挂系统及减振装置、基础制动装置、常接触式弹性旁承及横跨梁等组成,该型转向架采用了独特的弹簧托板、摇动座等结构,使之具有更好的横向性能及其它优点,其主要性能和基本尺寸见表3-2。
转K5型转向架属于摆式转向架,主要有以下优点[19,20,21,22]:
(1)采用了类似于客车转向架的摇动台摆式机构,使转向架横向具有两级刚度特性,大大增加了车辆的横向柔性,提高了车辆的横向动力学性能,降低了轮轨间的磨耗。
(2)由于摆动式转向架摇枕挡位置下移,使侧滚中心降低,对侧滚振动控制加强,有效地减小了爬轨和脱轨的可能性,尤其是对高重心的货车,大大提高了其脱轨安全性。
(3)当车辆通过曲线时车体向曲线内侧倾摆,使得车体重力的横向分量加大,从而使摆式货车能够以比常规货车更高的速度通过曲线。曲线通过速度提高可减少列车通过曲线的减速、加速时间,从而减少列车牵引能耗。
表3-2 转K5型转向架主要性能参数与基本尺寸
3.3.车辆系统动力学理论
3.3.1车辆随机振动系统
铁路货车运行于轨道上,实质是机械系统动力学过程,总体来说,就是铁路货车系统与具有连续支承结构的轨道之间的动态相互作业过程。由于货车转向架具有弹簧和摩擦减振装置,各组成部件之间存在复杂的作用力和铰接关系,因此铁路货车是一个多自由度的空间振动系统。铁路线路实际存在着一些不平顺,不可能是绝对平直和刚性的,实际的车轮也不是理想的几何圆形。因此,铁路车辆在轨道上运行时,轮轨之间会出现不断变化的作用力,这些作用力使车辆在轨道上产生复杂的振动并与轨道一起构成了随机振动系统[2,4,15]。
根据随机振动理论[23,24],系统受到随机激励时就会产生随机振动,又称为响应,这一过程可以用图3-3来表示:

图3-3 随机振动系统示意图
轨道不平顺等因素导致了车辆的随机振动,因此轨道不平顺被称为激励,车辆的随机振动型式等被称为对轨道不平顺的响应。确定车辆的横向振动偏移量就是在已知系统激励和系统特性条件下获求系统响应的问题[15]。
(1)与轨道有关的激励因素:
轨道方向不平顺、轨道轨距不平顺、轨道高低不平顺、轨道水平不平顺。
(2)与车辆有关的激励因素:
轮对的蛇形运动、车轮偏心、车轮不均重、车轮踏面擦伤。
3.3.2车辆的振动型式
若将车体视为支持在弹簧上的刚体,此刚体就称为簧上质量,这通常是指车体(包括载重)的质量。而弹簧以下的质量就称为簧下质量,这通常是指轮对轴箱装置和大多数货车转向架侧架的质量。研究车辆振动时,可以通过车体的重心O点引3个互相垂直的坐标轴x、y、z,此时车体具有6个独立的运动形式,即沿x、y、z轴3个方向的直线运动及以 表示的绕x、y、z轴的3个回转运动。于是车体在空间的位置完全由6个自由度的运动系统来描述[25]。
表示的绕x、y、z轴的3个回转运动。于是车体在空间的位置完全由6个自由度的运动系统来描述[25]。
当车体沿3个坐标轴及绕3个坐标轴振动时,分别给予下列名称:
(1)伸缩振动,即车体沿x轴方向所作的纵向振动,在某一瞬间,车体各点的纵向位移相等,车体平行于原有的平衡位置。
(2)横摆振动,即车体沿y轴方向所作的横向振动,在某一瞬间,车体各点的横向位移相等,车体平行于原有的平衡位置。
(3)浮沉振动,即车体沿z轴方向所作的铅垂振动,在某一瞬间,车体各点的铅垂位移相等,车体平行于原有的平衡位置。
(4)侧滚振动,即车体绕x轴作幅角为 的回转振动。
的回转振动。
(5)点头振动,即车体绕y轴作幅角为 的回转振动。
的回转振动。
(6)摇头振动,即车体绕z轴作幅角为 的回转振动。
的回转振动。
3.4 计算机仿真方法概述
对于NX70H型平车横向振动偏移量的研究而言,如果采用传统的实验研究方法,首先需要进行试验方案的设计、论证,然后选取合适的试验货物按照试验方案要求的工况装载,在不同的线路工况下以不同的速度进行试验。如此一来,一方面试验方案数量较多,需要进行多次装卸作业、运行试验以及大量的试验数据分析;另一方面,试验后需要根据试验结果调整试验方案重新进行试验。因此,试验周期很长,而且重复的装卸作业和运行试验需要大量的人力、物力和财力。采用计算机仿真实验是解决以上问题的有效方法。铁路车辆系统较为复杂,存在大量的非线性关系和自由度,但实质上属于机械系统,只要根据特定的物理规律描述车辆系统的运动,就可以在多体系统动力学仿真平台中建立车辆系统模型,进行三维可视化处理,模拟在真实环境下车辆的运动学和动力学特征[26]。
从20世纪80年代开始,国际上陆续开发成功一些商业化的铁道车辆多刚体动力学计算机仿真软件,如ADMAS/Rail、SIMPACK、VOCO、NUCARS等,并已在工程实际中得到应用。国际铁道车辆行业多次召开铁道车辆系统动力学仿真软件专业学术会议,对这些仿真软件进行研讨和交流,并提供专业考题对仿真软件进行测试。因此采用以上软件进行仿真计算是可行的。
在这些软件包中,SIMPACK的解算速度最快,并且同时保证了极高的解算精度和稳定性,正因如此,它的铁路模块在国际市场上的占有率达到了49%,居于首位。在研究铁路车辆系统动力学方面,许多学者都利用SIMPACK仿真平台来进行研究[27,28]。
基于以上原因,本文选用基于多体系统理论的MBS软件包SIMPACK作为NX70H型平车横向振动偏移量仿真实验平台。
SIMPACK的模型是通过其提供的建模单元建立起来的,然后自动产生系统运动方程。运动方程以符号和数值两种方式产生,数值形式是通常的表示形式。对于SIMPACK建模和仿真而言,首先需要将机械系统分解为各个物体(刚体或柔体),然后定义各个物体的质量和转动惯量属性,最后通过铰接关系或力元模拟物体间弹簧、阻尼、作动器的无质量力元件连接[29]。
SIMPACK建模中需要注意的几项重要参数[27,28,30]:
系统参考坐标系(System Reference Coordinates),即参考框架或惯性坐标系,惯性坐标系一般设定成大地上不动的坐标系,刚体的绝对运动量都是相对惯性坐标系来定义的。在惯性坐标系上可以定义相对于系统坐标的标记(Marker),也可以定义与刚体运动有关的移动标记(Move Marker)。
连体坐标系(Body Fixed Reference),固定在刚体上随刚体运动的坐标系,用以确定刚体的运动。刚体上每一个质点的位置都可以由其在连体坐标系中的不变矢量来确定。
刚体(Body),在运动学分析中,一般将对其运动特性特别关心的零部件定义为刚体。每个刚体都有一个连体坐标系,刚体上的标记都是相对连体坐标系定义。每个刚体还缺省地定义了一个传感器,用来测量刚体连体坐标的绝对运动,也可设定刚体上任意标记的传感器来测量刚体上任意点相对惯性坐标系的绝对运动。
标记(Marker),一些特定的点。例如力元必须连接在两个不同刚体的特定点上。标记必须与刚体或系统参考坐标系有关。
铰(Joint),也称铰接或运动副,是刚体相对系统惯性坐标系或其他某个刚体的运动关系。刚体与铰的定义是相关的,即定义了一个刚体就存在一个相应的铰。每个刚体都只有一个铰接。
力元(Force Element),零部件之间的相互联系。刚体之间的弹簧、减振器等都可以用力元代替,适当的引入力元对于减少多体动力学的规模是非常有利的。当两个刚体间产生相对位移时,力元会在这两个刚体间施加一定的力或力矩,其大小与力元的特性有关,例如弹簧的刚度等。
缪炳荣、肖守讷、金鼎昌等人在《应用SIMPACK对复杂机车多体系统建模与分析方法的研究》中,借助SIMPACK仿真出机车动力学建模系统中的体之间的铰接、约束和力元,建立了一种机车整车虚拟动力学模型。通过实例,对机车动力学模型输入标准轨道谱,分析其在标准轨道谱的随机激励下车体结构的响应特征,并对动力学平稳性结果进行部分评价[31]。邓永权,罗世辉,梁红琴,马卫华等人在《基于SIMPACK的磁悬浮车辆耦合动力学性能仿真模型》中引入了SIMPACK仿真软件,根据磁悬浮车辆多体系统动力学拓扑关系图,建立了磁悬浮车辆一轨道一控制系统的耦合动力学模型,分析了试验结果和仿真结果[32]。张亮,任尊松在《交叉支撑装置对转向架动力学性能影响的探讨》中运用SIMPACK动力学软件,通过模拟计算,仅就交叉支撑装置对转向架动力学性能的影响进行了初步的探讨[33]。
综上所述,将车辆动力学理论与仿真软件结合起来研究车辆横向偏移量,可以比较准确地得出仿真结果,指导实践。
4.总结
我国在车辆横向振动偏移量的研究方面并不系统,需要进一步研究车辆横向振动偏移量,从而为超限车运行条件提供理论依据。车辆系统动力学与计算机仿真模拟实验的结合为该项研究提供了新的试验方案安排方法与车辆运行安全性分析方法。
参考文献
[1] 刘作义,郎茂祥. 铁路货物运输[M].北京:中国铁道出版社,2011
[2] 严隽耄.车辆工程[M].北京:中国铁道出版社,2008
[3] 王福天.车辆动力学[M].北京:中国铁道出版社,1981
[4] 王福天.车辆系统动力学[M].北京:中国铁道出版社,1994
[5] 雷定猷.货物装运优化理论与应用研究[D].中南大学,2005
[6] 郭志学,施治才译.国际铁路联盟规程V车辆(I)[M].青岛:铁道部四方车辆研究所,1995
[7] 郭志学,施治才译.国际铁路联盟规程V车辆(II)[M].青岛:铁道部四方车辆研究所,1995
[8] 郭志学,施治才译.国际铁路联盟规程V车辆(III)[M].青岛:铁道部四方车辆研究所,1995
[9] 郭志学,施治才译.国际铁路联盟规程V车辆(IV)[M].青岛:铁道部四方车辆研究所,1995
[10] 郭志学,施治才译.国际铁路联盟规程V车辆(V)[M].青岛:铁道部四方车辆研究所.1995
[11] UIC规程.UIC505-1 铁路机车车辆限界(第7版)[M].北京:铁道部标准计量研究所,1998
[12] 周大梅,曾敏士译.国际铁路联盟标准 铁路机车车辆验收用运行技术试验铁路车辆内旅客振动舒适性评价准则[M].北京:铁道部标准计量研究所,1998
[13] 周宏业,朱其杰.国外高速铁路标准及规程汇编[M].北京:铁道科学研究院,1994
[14] 鞠殿明.韩梅.郭维鸿.超限车侧滚振动偏移量的确定方法及影响因素分析[J].铁道学报,1996(6)
[15] 韩梅.铁路超限货物运输理论及其应用研究[D].北京:北京交通大学,2006
[16] 鞠殿明.超限货物运输基本理论及其应用的研究[D].北京:北方交通大学,1997
[17] 郭维鸿.关于改革超限货物计算宽度先行公式的建议[J].北方交通大学学报,1985(1)
[18] 赵中庸.李伟.闫建光.70吨级新兴铁路货车诞生记[J].中国铁路,2006(3)
[19] 陈雷.张志建.70t级铁路货车及新型零部件[M].中国铁道出版社,2007
[20] 贾瑞民.摆式列车关键技术的研究[D].北京:北京交通大学,2008
[21] 丰碧云.铁路提速货车摆式转向架系统可靠性研究[D].北京:北京交通大学,2006
[22] 廖志刚.铁路货车转向架运用性能分析[D].北京:中南大学,2009
[23] 雷晓燕.毛利军.线路随机不平顺对车辆——轨道耦合系统动力响应分析[J].中国铁道科学,2001
[24] 陈果.翟婉明.左洪福.车辆——轨道耦合系统随机振动响应特性分析[J].交通运输工程学报,2001
[25] 任尊松.车辆系统动力学[M].中国铁道出版社,2007
[26] 陈超.铁路通用货车重车重心合理限制高度的研究[D].北京交通大学,2011
[27] 缪炳荣.SIMPACK动力学分析基础教程[M].成都:西南交通大学出版社,2010
[28] 缪炳荣.SIMPACK动力学分析高级教程[M].成都:西南交通大学出版社,2010
[29] I.Kuti. Simulation of Vehicle Motions on the Basis of the Finite Element Method. Vehicle System Dynamics 2001,36(6):445-469
[30] SIMPACK Theory. INTEC Ltd. Version8514,2002
[31] 缪炳荣.肖守讷.金鼎昌.应用Simpack对复杂机车多体系统建模与分析方法的研究[J].机械科学与技术,2006
[32] 邓永权.罗世辉.梁红琴.马卫华.基于SIMPACK的磁悬浮车辆耦合动力学性能仿真模型[J].交通运输工程学报,2007
[33] 张亮.任尊松.交叉支撑装置对转向架动力学性能影响的探讨[J].铁道机车车辆,2004