甘肃农业大学
学生科研训练计划(SRTP)
项目申请书
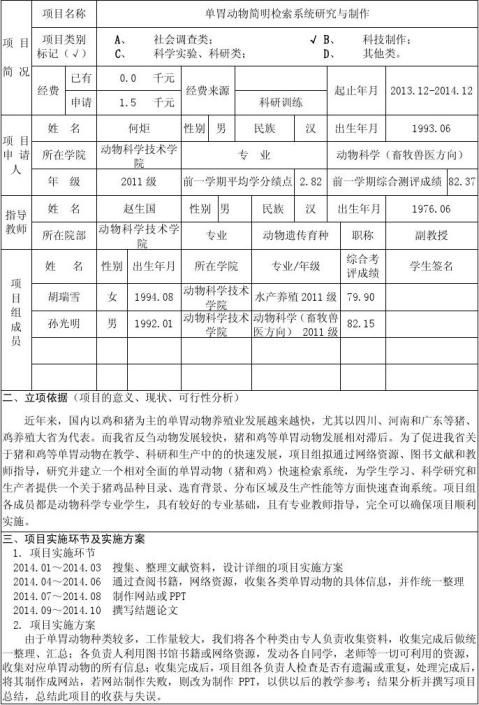
项目名称: 单胃动物简明检索系统研究与制作
申 请 人: 何 炬
所在院部: 动物科学技术学院
联系电话: 182xxxxxxxx
指导教师: 赵生国 职称 副教授
申请日期:
填 表 说 明
一、 填写立项申请书前,请先咨询指导教师或有关专业教师。申请书的各项内容要求实事求是,逐条认真填写。表达明确、严谨,一律要求用打印稿件。
二 、申请书为A4开本,复印时用A4复印纸,于左侧装订成册。由指导教师和所在院SRTP项目工作小组审查并签署意见后报送SRTP管理领导小组,审查通过后申请书由学院存档。
三 、“所在单位意见”一栏中,应注明研究人员、时间、条件、政策等方面的保证措施和意见。“项目类别”指A、B、C、D,A—社会调查类;B—科技制作;C—实验设计、科研类;D—其他类。“项目批准号”不填,由学校统一编号。
四、如表格不够,可以加附页。
第二篇:SRTP申请书预备
SRTP---基于二型模糊逻辑的移动机器人的故障检测技术
1、项目的立项依据
随着计算机、微电子、信息处理及智能控制的快速发展,机器人技术也在逐步深入和细化[1, 5]。机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现。作为机器人技术的重要领域,移动机器人是一类能够通过传感器感知环境和自身状态,实现在有障碍物的环境中面向目标的自主运动(称为导航),从而完成一定作业功能的机器人系统,是机器人学中的一个重要分支,正越来越多地受到人们的关注,并朝着智能化和多样化的方向发展,开发速度越来越快,应用领域也越来越广。从机器人足球赛到陆地无人自主车赛,从无人机到机器鱼,从资源探测到机器人走向战场,移动机器人已经涉及工农业生产、军事应用、海洋开发、宇宙探测、社会服务、娱乐等各个领域。它的研究涉及机械工程、计算机、传感器技术、机器视觉、自动控制、人工智能等诸多科学领域,内容广泛。移动机器人不仅能够在经济、国防、教育、文化和生活中起到越来越大的作用,而且还是研究复杂智能行为的产生、探索人类思维模式的有效工具与实验平台。
半个世纪以来,人类的研究和活动领域已由陆地扩展到深海和太空。利用移动机器人进行空间探测和开发,已成为21世纪世界各主要科技发达国家开发空间资源的主要手段之一。研究和发展月球探测移动机器人技术,对包括移动机器人导航控制在内的相关前沿技术的研究将产生巨大的推动作用。移动机器人在月球和火星等外星球表面导航时将面临复杂的未知环境。未知环境中的移动机器人自主导航控制技术已成为空间探测机器人的一项关键技术。
在移动机器人导航控制理论和方法的研究中,确定性环境的导航控制方法已取得了大量的研究和应用成果[4, 6],对这些研究方法及成果的改进以及基于新思维的移动机器人的导航控制研究将是未来移动机器人技术的研究重点。对未知环境中的导航控制也开展了一些研究[12],并提出了若干方法,但尚未形成统一和完善的体系结构,还有许多关键理论和技术问题有待解决和完善,这些问题主要包括环境建模、定位、导航控制器的学习与优化、故障诊断、在线运动规划与控制等。未知环境中的移动机器人只具有较少的先验知识,其导航控制方法涉及环境认知、优化决策、知识表示与获取等多项关键问题。对未知环境中的移动机器人导航控制理论和方法的研究,将推动认知科学、模式识别、非线性控制等前
沿学科的研究,带动航天、海洋、军事、建筑、交通、工业和服务业等领域移动机器人导航控制系统的开发研究,为无人探测车、无人排险车和无人运输车等用于航天、军事、深海作业和核工业领域的移动机器人系统的应用奠定理论和技术基础。
另一方面,自美国的控制论专家L. A. Zadeh教授于19xx年在《Information and Control》杂志的 “Fuzzy sets”一文中首次提出模糊集合的概念之后,基于模糊集的模糊理论应运而生,且发展十分迅速,除了在模糊逻辑、模糊拓扑、模糊概率、模糊测度论等理论方面得到长足的发展之外[3], 模糊控制、模糊聚类分析、模糊模式识别、模糊决策、模糊线性规划技术也广泛应用于工业生产、航空航天、机器人、通信、计算机科学、生物、医学、社会学、经济学、管理学等诸多领域。当然,其最重大的应用一直集中在控制问题上[17]。由于模糊控制系统易于接受,设计简单,维护方便,且比常规控制系统稳定性好,鲁棒性高,使得模糊控制正在得到越来越广泛的应用。而今,模糊控制与神经网络、遗传算法、自学习、自适应思想的结合更是将模糊控制的应用推到了一个新的高潮。
然而模糊系统也存在诸多不完善之处,其主要缺陷有:
(1)
(2)
(3) 系统精度和速度的矛盾; 设计尚缺乏系统性; 无法定义系统目标,
等。这些对复杂和高不确定性系统的处理是困难的。为了解决上述提到的这些问题,可行的方法之一是增强系统方法的模糊性。二型模糊系统(或二型模糊逻辑统)Type-2 FLS是一个新的系统工具,它于19xx年,由南加州大学(University of Southern California)电子工程系的一个工作小组提出并成功应用于时变信道均(time-varying channel equalization)上 [13],效果明显。在整个过程中,他们初步提出完整的二型模糊系统方法。此后国际上有研究机构将这类方法应用于通信、生物、金融等领域[14, 15, 18]。成功利用 Type-2 FLS 的案例有:编码视频流分类、图像预处理、网络接入控制、问卷知识提取、时序预测、函数拟合、时变非线性信道干扰噪音消除、辅助决策、语言学习训练、解模糊等式、推理库、交通规划等。还有学者进一步指出当处于以下条件下,Type-2 FLS 是可以考虑的:
(1) 数据产生系统,且系统是时变但时变特征无法用数学语言描述;
(2) 不稳定的测量噪声,且不稳定性不能用数学语言描述(如时变SNR);
(3) 模式识别,且识别特征具有不稳定、不能用数学语言描述的概率特性;
(4) 知识提取,特别是从包含不确定词汇的专家群问卷中提取;
(5) 不可描述域的语元,等.
最近,很多学者将二型模糊系统应用于移动机器人的跟踪控制[7, 10]、避障控制[2, 7, 8, 10]、环境认知[16]等,大大提高了移动机器人的跟踪、避障、环境认知精度以及鲁棒性。
考虑到在移动机器人的导航控制(包括环境建模、机器人定位、路径规划、故障检测)中,环境的不确定性、自身所带传感器的误差、噪声干扰、软故障检测等因素在机器人的移动过程中难以用精确的数学语言描述,若采用二型模糊系统,则能比较准确的捕捉移动机器人的上述不确定性特点。因此,本课题拟将二型模糊系统与机器学习理论、优化方法、鲁棒控制等结合应用于移动机器人的导航控制研究中,以期望在推动二型模糊理论和技术的应用范围的同时,更大的提高移动机器人的性能。
本项目的成功实施将不仅能提高移动机器人的多项性能,而且对于移动机器人的导航控制研究提供了新的思维和方法,具有重要的理论意义和实际应用价值。
参考文献:
[1] Oscar Castillo, Patricia Melin, Type-2 Fuzzy Logic: Theory and Applications, Springer-Verlag Berlin Heidelberg, 2008.
[9] Juang C. F., Tsao Y. W., A Type-2 Self-Organizing Neural Fuzzy System and Its FPGA Implementation, IEEE Trans. on Fuzzy Systems, 2008, 38(6): 1537-1548.
[10] Juang C. F., Hsu C. H., Reinforcement Ant Optimized Fuzzy Controller for Mobile-Robot Wall-Following Control, IEEE Trans. On Industrial Electronics, 2009, 56(10): 3931-3940.
[11] Juang C. F., Lu C. M., Ant Colony Optimization Incorporated with Fuzzy Q-Learning for Reinforcement Fuzzy Control, IEEE Trans. On Systems, Man, and Cybernetics-Part A: Systems and Humans, 2009, 39(3): 597-608.
[15] Liang Q., Mendel J. M., Interval type-2 fuzzy logic systems: Theory and design, IEEE Trans. Fuzzy Syst., 2000, 8(5): 535–550.
[17] Wang L. X., A course in fuzzy systems and control, Prentice-Hall Inc, 1996.(中文)
[18] Wu H. W., Mendel J. M., Uncertainty Bounds and Their Use in the Design of Interval Type-2 Fuzzy Logic Systems, IEEE TRANS. ON Fuzzy Systems, 2002, 10(5): 622-639.
A. 研究内容:
(3) 基于二型模糊系统的移动机器人的软故障检测与补偿
在进行移动机器人的故障诊断和容错控制中,对于软故障的检测是很重要的一部分内容。软故障是指元件性能下降但没有完全失效。若能通过控制器及时检测出元件的软故障,并给以及时修正、补偿或更换,比发现真正的故障时再进行维修、处理能带来更高的效率,从而节约成本、增加效益。软故障的种类多种多样,性能下降的程度也不尽相同。为此,我们拟将软故障的类型用二型模糊集来表达,根据从传感器传来的误差信息量的多少来确定相应的二型模糊集作为模糊事件,然后运用基于粒子滤波器的混合动态系统估计方法进行软故障检测,此时其中的状态转移概率以及似然概率均为(二型)模糊概率,从而可利用模糊概率理论进一步解决问题。在此基础上,还将设计软故障补偿的自适应粒子滤波器算法。利用二型模糊系统以及模糊概率理论能更精细、更及时的进行故障检测和补偿,从而提高移动机器人的工作效率。
B. 研究目标:
本项目拟将二型模糊系统应用于移动机器人的导航控制研究中,以期望更大的提高移动机器人的性能和拓展二型模糊理论的应用范围。具体地,拟将二型模糊系统引入基于最大似然估计的地图匹配移动机器人定位中,用于处理不确定因素的影响,从而提高定位精度以及系统的鲁棒性;将二型模糊系统和形式概念分析结合应用于移动机器人的路径规划,以降低算法的复杂度和提高导航的准确度;将二型模糊系统及模糊概率理论运用于移动机器人的软故障检测与补偿技术中,以便更及时准确地预测故障,提高移动机器人的工作效率。
3、拟采取的研究方案及可行性分析
A. 拟采取的研究方案:
(3) 在进行移动机器人的故障诊断和容错控制中,将软故障的类型用区间二型模糊集来表达,根据从传感器传来的误差信息量的多少来确定相应的二型模糊集作为模糊事件,然后运用基于粒子滤波器的混合动态系统估计方法进行软故障检测,此时可将相应的区间二型模糊集的均值作为其中的状态转移概率及似然
概率。在此基础上,可进一步设计软故障补偿的自适应粒子滤波器算法。
B. 可行性分析:
本项目申请人博士之前的专业为模糊拓扑,在多年对拓扑以及模糊数学的学习、讲授中已积累了很多模糊理论的知识和技术,且数学功底深厚,近两年对于模糊控制的学习、讲授以及对机器人学的潜心研究,已对移动机器人有了深入了解。而且在项目申请之前已对本项目拟解决的关键问题做了许多尝试,部分工作已整理成文。项目组主要成员都是博士,主要研究领域为多智能体的协同控制、鲁棒自适应控制,以及最优化理论与方法等,都具有很深厚的数学功底及应用背景。而且,本团队所在的实验室拥有多个移动机器人,必要的话可直接通过机器人进行实验验证。此外,对于拟采取的研究方案我们已进行了详细论证和充分讨论。因此,本项目是完全可行的。
4、本项目的特色与创新之处
(3) 将软故障的类型用二型模糊集来表示,能更加精确的表达软故障,此时运用基于粒子滤波器的混合动态系统估计方法进行软故障检测和补偿时,其中的状态转移概率以及似然概率均为模糊事件的概率,即模糊概率。模糊概率继承了通常概率的很多性质,但又有所不同,因此运用更深刻的二型模糊理论以及模糊概率理论,能更及时准确的预测软故障并进行补偿,从而提高移动机器人的工作效率。