实训报告-走迷宫机器人
姓名: 张
学号: 20101302
组员: 王
班级: 计控1101
系部: 计算机应用系
摘要
我们本次实训采用的能力风暴机器人套件组装的智能小车,利用两层钢板做为车架,以AS-EICON II控制器为核心,加上灰度传感器和电源供电电路以及其他电路组成,,AS-EICON II控制器对灰度传感器采集到得信号予以分析判断,及时控制驱动直流电机以调整小车前进后退以及左右移动,此外,对整个控制软件设计和程序的编制以及程序的调试,使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹走出迷宫的目的。
关键词:AS-EICON II、灰度传感器、调试、黑色轨迹。
Abstract
The training ability storm robots kit assembly smart car, two layers of steel as a frame, as the core the AS-EICON II controller, plus Grayscale sensor and power supply circuit and other circuits, , AS-EICON II controller gray sensor signal acquisition to be analyzed to determine, in a timely manner to control the drive DC motor to adjust the car forward and back, and move around, in addition, control software design and program preparation, and program debugging, car automatic travel along the black trajectory to achieve the purpose of the car with automatic tracing out of the labyrinth.
Keywords: AS-an EICON II, gray-scale sensors, debugging, black trajectory.
目录
1. 项目概述.................................................................................................................. 3
2. 迷宫图...................................................................................................................... 4
3. 机器人套件组成...................................................................................................... 4
3.1 电机..................................................................................................................... 4
3.2 控制器................................................................................................................. 5
3.3 传感器................................................................................................................. 5
3.3.1光电传感器................................................................................................... 5
3.3.2碰撞传感器................................................................................................... 5
3.3.3灰度传感器................................................................................................... 6
3.3.4声音传感器................................................................................................... 6
4. 系统设计.................................................................................................................. 7
4.1小车组成.............................................................................................................. 7
4.1.1 控制部分组成.............................................................................................. 7
4.1.2传感器的选择............................................................................................... 8
4.2小车的效果图...................................................................................................... 9
4.3 设计框图............................................................................................................. 9
5. 走迷宫算法设计.................................................................................................... 10
5.1走直线................................................................................................................ 10
5.2向左转................................................................................................................ 11
5.3向右转................................................................................................................ 11
6. 程序模块................................................................................................................ 12
7. 总结........................................................................................................................ 13
1. 项目概述
利用能力风暴机器人套件,组装成一个小车,然后利用能力风暴机器人套件里面的AS-EICON II控制器控制该小车能够走出指定的迷宫。具体的要求如下:
1. 组装为一个三轮小车,其中两个为主动轮,一个为从动轮。
2. 分析该小车的控制部分组成。
3. 设计小车的传感器的组成,并能形成相应的控制思路。
4. 设计算法,使小车能从指定迷宫走出来。
5. 完成实训报告。
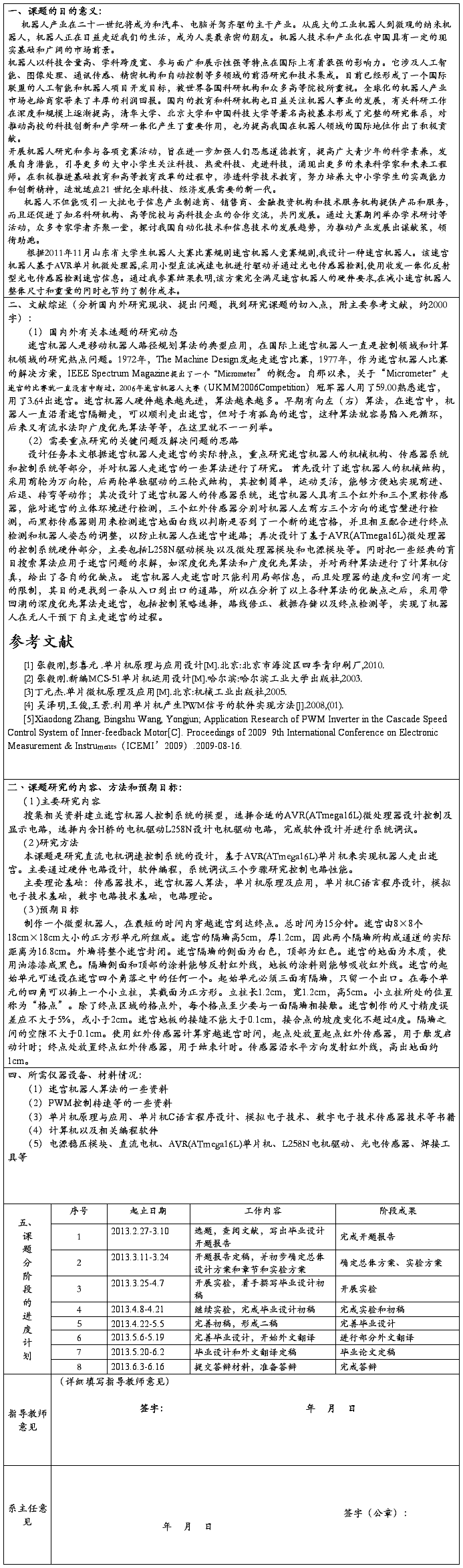
2. 迷宫图
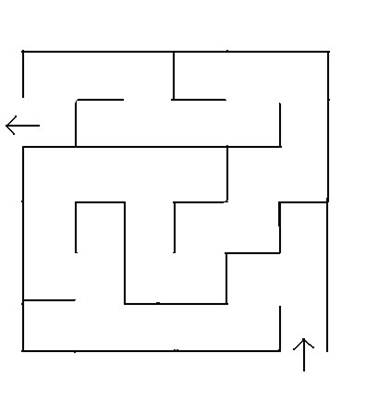
图1-迷宫图
3. 机器人套件组成
3.1 电机
AS-EICON II控制器提供4路电机控制,可连接AS-EI配套电机,实现电机正转,反转,停止,调速等操作。
3.2 控制器
AS-EICON II控制器采用了ARM7内核是通用的32位微处理器,它具有高性能和低功耗的特性。采用vjc2.0流程图编程,集成的USB2.0接口,程序下载方式更快更易于使用。
3.3 传感器
3.3.1光电传感器
光电传感器是通过把光强度的变化转换成电信号的变化来实现控制的,它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。

图2-光电传感器
3.3.2碰撞传感器
碰撞传感器用于检测碰撞程度,但前面有障碍物时,传感器的开关为通路,能够把信号发送给控制器,控制器再使小车转向。

图3-碰撞传感器
3.3.3灰度传感器
灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。在有效的检测距离内,发光二极管发出红光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为智能小车可以识别的信号。

图4-灰度传感器
3.3.4声音传感器
声音传感器内置一个对声音敏感的电容式驻极体话筒。声波使话筒内的驻极体薄膜振动,导致电容的变化,而产生与之对应变化的微小电压。这一电压随后被转化成0-5V的电压,经过A/D转换被数据采集器接受,并传送给控制器。
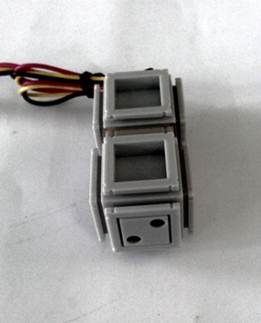
图5-声音传感器
4. 系统设计
4.1小车组成
AS-EICON II控制器、两个电机、两个轮胎、电池、五个灰度传感器、小车底盘、圆轴、短插销、方轴、连接器若干。
4.1.1 控制部分组成
32位ARM处理器、9路模拟信号输入端口、6路DO数字输出和伺服电机输出、4路电机驱动、标准I2C接口、外接电源接口、2个按钮控制界面、USB2.0接口、液晶显示屏幕。
图6-控制器
4.1.2传感器的选择
本次智能小车采用了5个灰度传感器用于循线。由于灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。在有效的检测距离内,发光二极管发出红光,照射在检测面上,检测面反射部分光线,光敏电阻检测此光线的强度并将其转换为智能小车可以识别的信号。相比光电传感器更容受外界的光线所干扰,故采用灰度传感器。
4.2小车的效果图
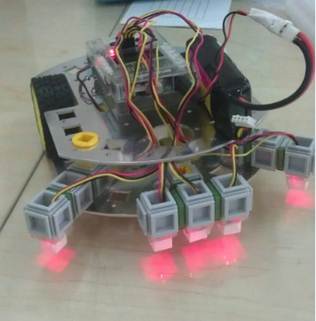
图7-小车效果图
4.3 设计框图
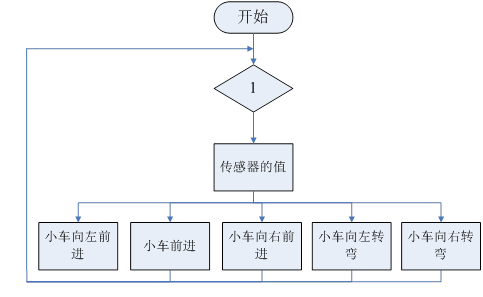
图8-设计框图
5. 走迷宫算法设计
5.1走直线

图9-小车直线行驶图
当机器人智能小车沿着直线走时,传感器会有不同的显示,如下:
01000=机器人智能小车轻微向右偏离赛道
10000=机器人智能小车严重向右偏离赛道
00100=机器人智能正好处于赛道黑线上
00010=机器人智能小车轻微向左偏离赛道
00001=机器人智能小车严重向左偏离赛道
通过传感器对不同情形的反馈,就可以确保小车能够准备的沿着赛道的黑线前进。
5.2向左转
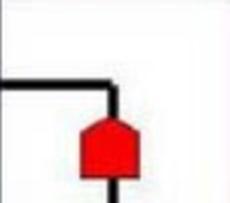
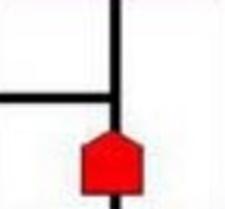
图10-小车想左转弯 图11-小车直线行驶或向左转
当机器人智能小车遇到“左转路口”和“左转或直行路口”模式都是11100,这时让机器人在前进一点,当传感器越过赛道后,如果寻线传感器显示数值为00000,那么这个路口就一定是左转路口,如果寻线传感器显示的数值为00100,那么这路口就是右转或直行路口。
5.3向右转
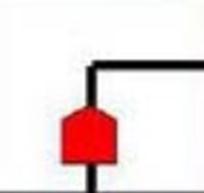
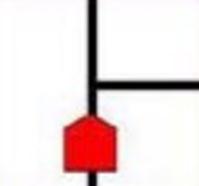
图12-小车向右行驶 图13-小车直线行驶或向左转
当机器人智能小车遇到“右转路口”和“右转或直行路口”模式都是00111,这时让机器人在前进一点,当传感器越过赛道后,如果寻线传感器显示数值为00000,那么这个路口就一定是右转路口,如果寻线传感器显示的数值为00100,那么这路口就是右转或直行路口。
6. 程序模块
直线:

图14-小车直线行驶程序模块
转弯:
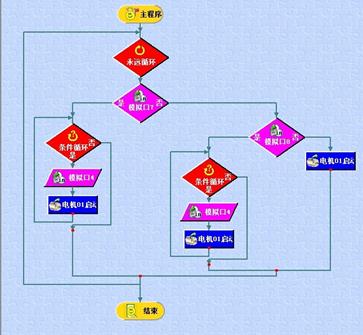
图15-小车转弯程序模块
7. 总结
通过本次实训对智能小车的设计与制作,不仅是对我们课本所学的知识的考查,更是充分发挥了我们的动手能力。本次设计使我们对一个项目的整体设计有了初步认识,同时认识了几种传感器,并能灵活运用。本次实训使我们意识到了实验的重要性,在安装与软件调试的过程中,出现了很多问题,在遇到问题的时候首先是自己去解决,然后是几个组之间进行商量,共同探讨问题的解决方法,还有就是坚持不懈的耐心,在做迷宫的调试中,小车的问题最大,前一次还能走好,但是你第二次去试车的时候就不对了,小车就乱跑,往往这样,但又不知道原因,只有拿回来重新下载,再去试车,经过不断的调试,现在小车已经能够独立的完成寻迹和避障功能了。虽然有时候它不能很完整的走完所规定的路线,但从它转弯、直走的轨迹上来说,已经基本上是按轨迹很完美的前行,左右摆动的幅度也不是很大,所以还是给人一种比较完美的感觉。另外,可能在安装上有点纰漏,使小车的运行轨迹总是很不稳定,前一秒钟是一种状态,后一秒有可能就是另外一种状态,所以需要不停的对小车进行修改。在实际操作中,我发现我们所使用的万用轮对小车的影响很大。比如在让它走直线时,有可能你在放下的那一刻它的前轮就是往某方向偏的,所以只要你一松开小车,它就会沿着那个方向前进。以前对程序也只是一个很模糊的概念,通过本次的实训使我对程序完全有了一个全新的认识,并能熟练使用VJC2.0流程图编程。这次实训极大的锻炼了我们的思考问题和动手能力。
第二篇:迷宫机器人设计开题报告
滨 州 学 院
毕业设计(论文)开题报告
题 目 基于AVR单片机的迷宫机器人设计
系 (院) 自动化系 年级 2009
专 业电气工程与自动化 班级 1班
学生姓名 王征飞 学号20009010674
指导教师 王志勇 职称 助教
滨州学院教务处
二〇一三 年 三 月
开题报告填表说明
1.开题报告是毕业设计(论文)过程规范管理的重要环节,是培养学生严谨务实工作作风的重要手段,是学生进行毕业设计(论文)的工作方案,是学生进行毕业设计(论文)工作的依据。
2.学生选定毕业设计(论文)题目后,与指导教师进行充分讨论协商,对题意进行较为深入的了解,基本确定工作过程思路,并根据课题要求查阅、收集文献资料,进行毕业实习(社会调查、现场考察、实验室试验等),在此基础上进行开题报告。
3.课题的目的意义,应说明对某一学科发展的意义以及某些理论研究所带来的经济、社会效益等。
4.文献综述是开题报告的重要组成部分,是在广泛查阅国内外有关文献资料后,对与本人所承担课题研究有关方面已取得的成就及尚存的问题进行简要综述,并提出自己对一些问题的看法。
5.研究的内容,要具体写出在哪些方面开展研究,要突出重点,实事求是,所规定的内容经过努力在规定的时间内可以完成。
6.在开始工作前,学生应在指导教师帮助下确定并熟悉研究方法。
7.在研究过程中如要做社会调查、实验或在计算机上进行工作,应详细说明使用的仪器设备、耗材及使用的时间及数量。
8.课题分阶段进度计划,应按研究内容分阶段落实具体时间、地点、工作内容和阶段成果等,以便于有计划地开展工作。
9.开题报告应在指导教师指导下进行填写,指导教师不能包办代替。
10.开题报告要按学生所在系规定的方式进行报告,经系主任批准后方可进行下一步的研究(或设计)工作。