DSP实验报告
院系名称 电气与信息工程学院
专业名称 电气工程及其自动化
班 级 电气1002班
学生姓名 苏 美 龙
学 号 10401700403
指导老师 易 吉 良
2013年 11 月 6 日
实验一 拨码开关实验
—、实验目的
1.了解DSP开发系统的组成和结构
2.了解IO 的基本编程方法
二、实验设备
计算机,CCS3.1版本软件,DSP 仿真器,E300 实验箱,2812CPU板(新的)
三、实验原理
8位的数字量输入(由拨码开关产生),当拨码打到靠近LED时为低。相反为高。通过74LS244(可读)缓冲连接到DSP 的数据总线的低8 位。CPU 通过读指令读取到拨码开关产生的8 位输出的数字量,然后CPU通过写指令把读出的8 位数字量写入(0x0200)单元内,使连接到DSP的数据总线的低8 位的74LS273的输出端产生高低信号,此时LED 灯产生亮灭。当对应LED 灯点亮时说明输出为低,熄灭时为高。(器件 74LS244和74LS273详细的介绍请参看数据手册)。
数字量输入输出单元的资源分配如下:
基地址:0000h(当CS0为0时分配有效)
数字量分配空间为数据空间地址:基地址+0x200(低8位,只读)
拨码开关扩展工作原理
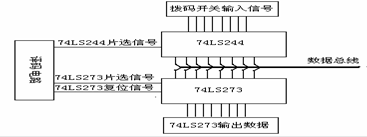
说明:74LS244 片选号、74LS273 片选信号和74LS273 复位信号由E300 上CPLD 译码产生。
本实验使用DSP 数据总线的低8位。
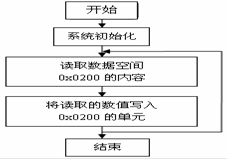
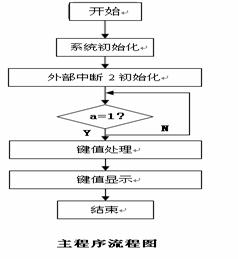
本实验的程序流程框图如下:
四、实验步骤
1. 2812CPU板上的JUMP1的1和2脚短接,拨码开关SW1的第二位置ON。
2.E300 板上的开关SW4 的第一位置ON,其余OFF;SW5开关全部置ON;其余开关全部置OFF。
3. 运行Code Composer Studio (CCS)(ccs3.1需要“DEBUG→Connect” )
4. 用“Project\Open”打开系统项目文件\e300.test \ normal\DSP2801x_example\e300_02_swich\ Exampla_281_swich.pjt;
5. 编译全部文件并装载\normal\DSP2801x_example\e300_02_swich\ Exampla_281_swich.out;
6. 单击“Debug \Go Main”跳到主程序的开始;
7. 单击“Debug \RUN”运行程序
8.任意拨动E300 底板上的拨动开关,观察LED和拨动开关的对应情况。(LED1-LED7分别对应DSP 数据总线的D0-D7);
9.单击“Debug \Halt” 暂停持续运行,开关将对灯失去控制.
10.关闭所有窗口,本实验完。
五、实验结果
设置好CCS的环境,打开本工程,编译、下载、运行。调整数字输入输出单元的开关K1~K8,观察LED1~LED8灯亮灭的变化为:拨动LED1~LED8灯相应的开关K1~K8,则对应的灯亮灭。
修改后的实验原程序:
#include "DSP281x_Device.h" // DSP281x Headerfile Include File
#include "DSP281x_Examples.h" // DSP281x Examples Include File
void main(void)
{
unsigned int temp;
temp = 0;
InitSysCtrl();//初始化PLL,WatchDog,使能外围时钟,该初始化文件在"DSP281x_SysCtrl.c"中
DINT;//关闭CPU中断
InitPieCtrl();
IER = 0x0000;//关闭中断和清除所有中断标志
IFR = 0x0000;
InitPieVectTable();
for(;;)
{
asm(" nop ");
temp = *(int *)0x2200&0x0007; //读入0x2200地址的开关量值并赋给temp
switch(temp)
{
case 0x0000: * (int *)0x2200 = 0x00fe; break;
case 0x0001: * (int *)0x2200 = 0x00fd; break;
case 0x0002: * (int *)0x2200 = 0x00fb; break;
case 0x0003: * (int *)0x2200 = 0x00f7; break;
case 0x0004: * (int *)0x2200 = 0x00ef; break;
case 0x0005: * (int *)0x2200 = 0x00df; break;
case 0x0006: * (int *)0x2200 = 0x00bf; break;
case 0x0007: * (int *)0x2200 = 0x007f; break;
default:break;
}
asm(" nop ");
asm(" nop ");
}
}
实验二 定时器实验
一、实验目的
1、熟悉F2812的CPU定时器;
2、掌握F2812的CPU定时器的控制方法;
3、学会使用CUP定时器中断方式控制程序流程。二、实验设备
计算机,CCS3.1版软件,DSP硬件仿真器,E300实验箱,2812CPU板。
三、实验原理说明
样例实验是采用CPU定时器来定时LED亮灭的。
F2812的CPU定时器不同于事件管理器(EVA\EVB)中的通用定时器(GP)。F2812的CPU共有三个定时器,其中,CPU1定时器1和2被保留用作实验操作系统OS例如DSPBIOS),CPU定时器0可以供用户使用。
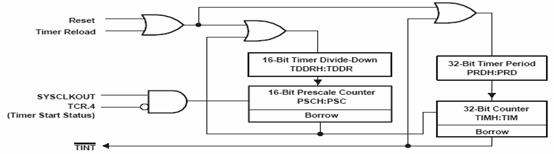
定时器的一般操作如下:将周期寄存器PRDH:PRD中的值装入32位计数器寄存器TIMI:TIM。然后计数器寄存器以F2812x的SYSCLKLT速率递减。当计数器减到0,就会产生一个定时器中断输出定时信号(一个中断脉冲)。
下图为CPU定时器的内部结构:
样例实验的程序如下:
四、实验步骤和内容
1、F2812CPU板的JUPMI的1和2脚短接,拨码开关 SW1的第二位置ON;其余OFF。
2、E300 底板的开关SW4 的第1位置ON,其余位置OFF。其余开关设置为OFF;
3、运行CCS软件,调入样例程序,装载并运行;(进入CCS界面后需要点“Debug--Connect”);
4、加载“..\e300_03cpu_timer\Debug\Eample_281x_cpu_timer.out”;
单击“Debug \ Animate”运行,
可观察到LED1~LED8的变化规律:
先LED1,8点亮—LED2,7D点亮—LED1,8熄灭—LED3,6点亮—LED2,7熄灭—LED4,5点亮—LED3,6熄灭—后LED4,5熄灭—LED3,6点亮—LED3,6熄灭—LED2,7点亮—LED2,7熄灭—LED1,8点亮。
6、单击“Debug \ Halt”,暂停程序运行,LED灯停止闪烁;单击“RUN”,LED灯又开始闪烁变化;
7、结束试验程序
8、修改后的实验原程序:
#include "DSP281x_Device.h"
#include "DSP281x_Examples.h"
interrupt void cpu_timer0_isr(void);
void ConfigCpuTimer(struct CPUTIMER_VARS *Timer, float Freq, float Period);
void main(void)
{
unsigned int temp;
temp = 0;
InitSysCtrl();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW;
PieVectTable.TINT0 = &cpu_timer0_isr;
EDIS;
InitCpuTimers();
ConfigCpuTimer(&CpuTimer0, 100, 100000);
StartCpuTimer0();
IER |= M_INT1;
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
EINT;
ERTM;
for(;;)
{
temp = *(int *)0x2200&0x0001;
if (temp==0)
{
if(CpuTimer0.InterruptCount<1)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
}
else if(CpuTimer0.InterruptCount<2)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<3)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<4)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<5)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<6)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<7)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<8)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<9)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<10)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<11)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<12)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else
{
CpuTimer0.InterruptCount = 0;
}
}
else if (temp==1)
{
if(CpuTimer0.InterruptCount<9)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
}
else if(CpuTimer0.InterruptCount<8)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<3)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<4)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<5)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<6)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<7)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<8)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<9)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<10)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<11)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<12)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else
{
CpuTimer0.InterruptCount = 0;
}
}
}
}
interrupt void cpu_timer0_isr(void)
{
CpuTimer0.InterruptCount++;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
实验三 键盘接口实验(E300)
—、实验目的
1. 了解DSP开发系统的组成和结构
2. 了解键盘的基本编程方法
3. 内存观察工具的使用
二、实验设备
计算机,CCS3.1版本软件,DSP 仿真器,E300 实验箱,2812CPU板
三、实验原理
本实验程序由二部分组成:
1.由外部中断2产生中断信号
2.键值读取程序:该部分有两种方法进行键值的判断。
方法1:利用内存观察工具进行观察
方法2:利用LED1-LED8 的亮灭对应显示键值。
a) 外部中断2的应用参照实验二;
b) 内存观察键值:程序中定义了三个变量“W”“row”和“col”。“W”代表是CPLD 中键盘的扫描数值,“row”和“col”分别代表键盘的行和列,由行和列可以判定按键的位置。上述三个变量可以在观察窗口中观察的。
c) 利用LED 灯显示键值原理,参看实验一。具体的LED 灯显示值以查表的形式读出,请参看“e300_codec.h”库文件。
本实验的CPLD地址译码说明:
基地址:0x2000,当底板片选CS1为低时,分配有效。
CPU的数据空间:基地址+0x0200 LED灯 output8
外部中断用XINT2:由CPLD分配,中断信号由键盘产生。
中断下降沿触发。
KEY_DAY_REG(R):基地址+0x0004;
四、实验步骤和内容
1. 2812CPU板JUMP1的1和2脚短接,拨码开关SW1的第二位ON;
2.E300 板上的开关SW4 的第一位置ON,其余OFF;SW3 的第四位置ON 其余的SW 置OFF;
3.运行Code Composer Studio (CCS)(ccs3.1需要“DEBUG→Connect” );
4.打开系统项目文件\e300.test\ normal\ DSP281x_examples\e300_06_key interface \Example_281x_ keyled.pjt;
5.编译全部文件并装载“\Debug\ keyled.out”文件;
6.单击“Debug\Go Main”跳到主程序的开始;
7.指定位置设置断点;
8.View--〉Watch Window 打开变量观察窗口;
将变量“w”“ row”和“ col”添加到观察窗口中,改变变量观察窗口的显示方式为HEX 显示;
点击“Debug--〉Animate”全速运行,然后点击E300 板上键盘按键,观察窗口中变量变化,同时LED1-LED8 灯也相应变化,指示键值。(注意程序中KEY_E和KEY_F分别代表键盘上的“*”和“#”键值。十六进制数代表的意义为:高4 位为按键的行值,低4 位为按键的列值。注意:“w”中的低八位表;
11.关闭所有窗口,本实验完毕。
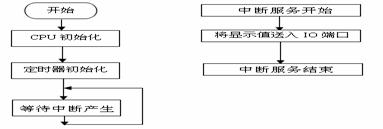
五、实验程序框图
修改后的实验原程序:
#include "DSP281x_Device.h" // DSP281x Headerfile Include File
#include "DSP281x_Examples.h" // DSP281x Examples Include File
#include "e300_codec.h"
void init_xint2(void);
interrupt void xint2_isr(void); //中断2中断子程序
void read_data ();//读取数据子函数
void conv(void);//键盘数值转换子函数
interrupt void cpu_timer0_isr(void);
void ConfigCpuTimer(struct CPUTIMER_VARS *Timer, float Freq, float Period);
unsigned int row,col,w;
int a=0;
unsigned int temp=0;
void init_xint2()
{
XIntruptRegs.XINT2CR.all=0x0001; //低电平触发中断
}
interrupt void xint2_isr() //中断2中断子程序
{
a=1;
//开总中断
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
interrupt void cpu_timer0_isr(void)
{
CpuTimer0.InterruptCount++;
more interrupts from group 1
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
void main(void)
{
Clocks
DSP281x_SysCtrl.c file.
InitSysCtrl();
DINT;
default state.
disabled and flags
InitPieCtrl();
CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
to the shell Interrupt
InitPieVectTable();
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.XINT2 = &xint2_isr;
PieVectTable.TINT0 = &cpu_timer0_isr;
EDIS;
InitCpuTimers(); // For this example, only initialize the Cpu Timers
second:
uSeconds)
ConfigCpuTimer(&CpuTimer0, 100, 100000);
StartCpuTimer0();
init_xint2();
PieCtrlRegs.PIEIER1.all = 0x0050;
IER |= M_INT1 ;
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
for(;;)
{
if(a==1)//加软件断点
{
temp = *(int *)0x2200&0x0001;
if (temp==0)
{
if(CpuTimer0.InterruptCount<1)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
}
else if(CpuTimer0.InterruptCount<2)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<3)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<4)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<5)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<6)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<7)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<8)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<9)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<10)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<11)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<12)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else
{
CpuTimer0.InterruptCount = 0;
}
}
else if (temp==1)
{
if(CpuTimer0.InterruptCount<9)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
}
else if(CpuTimer0.InterruptCount<8)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fe;
*(int *)0x2200=0x007f;
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<3)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<4)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<5)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<6)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<7)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00f7;
*(int *)0x2200=0x00ef;
}
else if(CpuTimer0.InterruptCount<8)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<9)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fb;
*(int *)0x2200=0x00df;
}
else if(CpuTimer0.InterruptCount<10)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else if(CpuTimer0.InterruptCount<11)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00fd;
*(int *)0x2200=0x00bf;
}
else if(CpuTimer0.InterruptCount<12)
{
asm(" nop ");
asm(" nop ");
*(int *)0x2200=0x00ff;
}
else
{
CpuTimer0.InterruptCount = 0;
}
}
read_data();
// conv();
}
else {}
}
}
六、实验建议
本实验程序采用外部中断的方式来判断键盘是否被按下,除了这种方法外,还可以根据键盘按下标志位“KEY_FLAG”,利用查询方式来编写程序,“KEY_FLAG”是CPLD内部状态寄存器中的一个只读位.
CPLD内部状态寄存器:
CPLD_ST
实验四 A/D转换实验(E300)
一、实验目的
1. 了解DSP 中A/D转换模块的特点;
2. 了解A/D转换模块的原理结构;
3. 掌握A/D转换模块的使用。
二、实验设备
计算机,DSP仿真器,THRSC-2型实验箱各一台。
三、实验原理
TMS320F2812的ADC模块是一个12位分辨率、高达80ns转换时间、具有流水线结构的模
—数转换器。此转换器的模拟电路包括:前端模拟多路复用器(MUXs)、采样/保持电路(S/H)、
转换核、电压调节器以及其他模拟支持电路。数字电路包括:可编程转换序列发生器、转换结果
寄存器、模拟电路接口、设备外围总线接口以及其他片上模块接口等,可以直接用于电机或运动
控制场合。
四、实验内容与步骤
连接好仿真器、计算机与实验箱,系统上电,实验箱电源指示灯亮,仿真器上红色指示灯亮,
系统连接正常。打开CCS3.1软件。
图1.6.3 实验程序流程图
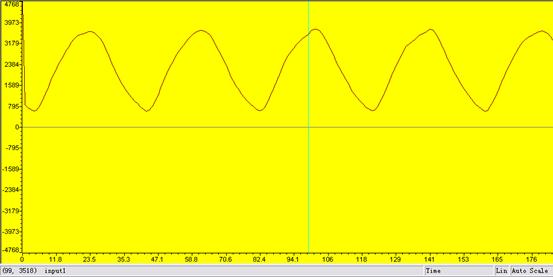
1.图1.6.3为A/D实验程序流程图:采集电位器电压。A/D用16个通道采集当前电压值,
取平均值,将十六进制数转换成十进制数,并处理成电压量输出给液晶屏显示,循环上述操作。
2.打开实验程序dsp2812.1.6-ADC目录下的工程ADC.pjt,点 编译、下载。按“F5”运
行,液晶屏显示当前DSP的ADCINA2(对应试验箱A/D转换单元的ADCINA)通道电压值,
调节A/D转换单元的电位器,改变输入电压,显示随之变化,显示电压在0~3.3V之间。
3.点“Halt”,停止程序运行,恢复程序指令初始值,并保存,关闭所有窗口,实验完毕。
修改后的实验原程序:
#include "DSP281x_Device.h" // DSP281x Headerfile Include File
#include "DSP281x_Examples.h" // DSP281x Examples Include File
interrupt void adc_isr(void);
Uint16 LoopCount;
Uint16 ConversionCount;
double input1[256];
double input2[256];
Uint16 a[4],b[4];
Uint16 sum1=0,sum2=0
void main(void)
{
InitSysCtrl();
EALLOW;
SysCtrlRegs.PLLCR.all=0x8;
SysCtrlRegs.HISPCP.all = 0x3; // HSPCLK = SYSCLKOUT/6
EDIS;
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW; // This is needed to write to EALLOW protected register
PieVectTable.ADCINT = &adc_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
InitAdc(); // For this example, init the ADC
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
IER |= M_INT1; // Enable CPU Interrupt 1
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
LoopCount = 0;
ConversionCount = 0;
AdcRegs.ADCTRL1.bit.SEQ_CASC = 1;
AdcRegs.ADCMAXCONV.all = 0x0007; // Setup 2 conv's on SEQ1
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0; // Setup ADCINA0 as 1st SEQ1 conv.
AdcRegs.ADCCHSELSEQ1.bit.CONV01 = 0x0; // Setup ADCINA2 as 2nd SEQ1 conv.
AdcRegs.ADCCHSELSEQ1.bit.CONV02 = 0x0;
AdcRegs.ADCCHSELSEQ1.bit.CONV03 = 0x0;
AdcRegs.ADCCHSELSEQ2.bit.CONV04 = 0x2;
AdcRegs.ADCCHSELSEQ2.bit.CONV05 = 0x2;
AdcRegs.ADCCHSELSEQ2.bit.CONV06 = 0x2;
AdcRegs.ADCCHSELSEQ2.bit.CONV07 = 0x2;
AdcRegs.ADCTRL2.bit.EVA_SOC_SEQ1 = 1; // Enable EVASOC to start SEQ1
AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1 = 1; // Enable SEQ1 interrupt (every EOS)
EvaRegs.T1CMPR = 0x0380; // Setup T1 compare value
EvaRegs.T1PR = 0x07FF; // Setup period register
EvaRegs.GPTCONA.bit.T1TOADC = 1; // Enable EVASOC in EVA 01下溢中断启动ADC
EvaRegs.T1CON.all = 0x1042; // Enable timer 1 compare (upcount mode)
for(;;)
{
*(int *)0x2200=0x0005;
LoopCount++;
}
}
interrupt void adc_isr(void)
Uint16 i; // ,j
a[0]=AdcRegs.ADCRESULT0>>4;
a[1]=AdcRegs.ADCRESULT1>>4;
a[2]=AdcRegs.ADCRESULT2>>4;
a[3]=AdcRegs.ADCRESULT3>>4;
b[0]=AdcRegs.ADCRESULT4>>4;
b[1]=AdcRegs.ADCRESULT5>>4;
b[2]=AdcRegs.ADCRESULT6>>4;
b[3]=AdcRegs.ADCRESULT7>>4;
for(i=0;i<4;i++)
{
sum1=sum1+a[i];
sum1=sum1/2;
}
for(i=0;i<4;i++)
{
sum2=sum2+b[i];
sum2=sum2/2;
}
input1[ConversionCount] =sum1/4095.0*3;
input2[ConversionCount] =sum2/4095.0*3;
if(ConversionCount == 256)
{
ConversionCount = 0;//加软件断点
}
else ConversionCount++;
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1; // Reset SEQ1
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1; // Clear INT SEQ1 bit
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Acknowledge interrupt to PIE
return;
}
实验结果波形:
实验五 PWM波形产生实验
一、实验目的
1.了解PWM波的产生原理;
2.掌握PWM波的使用方法。
二、实验设备
计算机,DSP仿真器,THRSC-2型实验箱,示波器,电机扩展板
三、实验原理
1.事件管理器EVA模块和EVB模块中分别有3个全比较单元,EVA的3个全比较单元为:
比较单元1、2和3;EVB的3个全比较单元为:比较单元4、5和6。每个比较单元都有两个相
应的PWM输出。比较单元的时基由通用定时器1(EVA模块)和通用定时器3(EVB模块)提
供。当比较操作使能时,GP定时器1和3可以工作在它的任何一种计数模式。
3.PWM波形发生器有以下特征:
z 有5个独立的PWM波形输出,其中3个由比较单元产生,另外2个由GP定时器产生,
3个比较单元PWM波形输出还会产生3个附加的PWM波形输出,即3个带可编程死区控制的
比较单元产生独立的3对输出。所以每个事件管理器总共有8个PWM波形输出。
z 最小的死区宽度为1个CPU时钟周期。
z 可编程的对称、非对称以及空间向量PWM波形。
z PWM载波频率的快速变化(具有双缓冲比较寄存器)。
z PWM脉宽的快速变化(具有双缓冲比较寄存器)。
四、实验内容与步骤
连接好仿真器、计算机与实验箱,电机扩展板排线接到实验箱电机扩展接口上;系统上电,
实验箱电源指示灯亮,仿真器上红色指示灯亮,系统连接正常。打开CCS3.1软件。
1.打开dsp2812.1.13-PWM目录下的工程PWM.pjt,点 编译、下载。按“F5”运行,用
示波器探头观测电机扩展板上的“PWM脉冲测试口”的PWM1、PWM2、PWM3、PWM4、PWM5
和PWM6插针。6路PWM波中的PWM1、PWM3、PWM5占空比分别为:1:3、1:1、3:1;PWM2、
PWM4、PWM6占空比分别为:3:1、1:1、1:3。采用双踪观察,PWM1和PWM2输出波形相互
对称,调宽波形,可以看到由于加入了死区时间,波形不是完全对称。PWM3、PWM4和PWM5、
PWM6同上。
2.用户可以修改文件“pwm.c”初始化函数“init_eva()”内的初始化设置:定时器周期值
(TIPR)、全比较器值(CMPR1、CMPR2、CMPR3)及死区控制寄存器(DBTCONA)的第5~7
THRSC-2 型DSP综合实验/开发系统
天煌科技 天煌教仪 187
位等(例如此时定时器初值EvaRegs.T1PR = 0xEA8; 比较寄存器1的值为EvaRegs.CMPR1 =
0x3AA;(设置PWM1 为低有效EvaRegs.ACTRA.all = 0x0999; 设置死区定时器为不使能
EvaRegs.DBTCONA.all = 0x051C;则我们测到的PWM1输出波形高低占空比为1:3=0x3AA :
(0Xea8-0x3AA))。死区控制寄存器(DBTCONA)的第5~7分别为死区定时器1、2、3的使
能位(用户可以修改使能位:置1为使能死区定时器,置0为不使能死区定时器),用户可以通
过修改死区控制寄存器(DBTCONA)第5~7位的相应位来改变相应PWM波带死区与不带死
区的输出结果比较。重复上述操作。(各寄存器详细说明参考该程序目录下的2812_ev.pdf文档
说明)
3.点“Halt”,停止程序运行,恢复程序指令初始值,并保存,关闭所有窗口,关闭电源,
修改后的实验原程序:
#include "DSP281x_Device.h" // DSP281x Headerfile Include File
#include "DSP281x_Examples.h" // DSP281x Examples Include File
interrupt void adc_isr(void);
Uint16 LoopCount;
Uint16 ConversionCount;
Uint16 input1[256];
Uint16 input2[256];
Uint16 Mixing[256];
int c=0;
void init_eva(void);
void main(void)
{
InitSysCtrl();
EALLOW;
SysCtrlRegs.PLLCR.all=0x8;
SysCtrlRegs.HISPCP.all = 0x3; // HSPCLK = SYSCLKOUT/6
EDIS;
EALLOW;
GpioMuxRegs.GPAMUX.all = 0x003F; // EVA PWM 1-6 pins
EDIS;
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW; // This is needed to write to EALLOW protected register
PieVectTable.ADCINT = &adc_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
InitAdc(); // For this example, init the ADC
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
IER |= M_INT1; // Enable CPU Interrupt 1
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
LoopCount = 0;
ConversionCount = 0;
AdcRegs.ADCTRL1.bit.SEQ_CASC = 1;
AdcRegs.ADCMAXCONV.all = 0x0001; // Setup 2 conv's on SEQ1
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0; // Setup ADCINA0 as 1st SEQ1 conv.
AdcRegs.ADCCHSELSEQ1.bit.CONV01 = 0x2; // Setup ADCINA2 as 2nd SEQ1 conv.
AdcRegs.ADCTRL2.bit.EVA_SOC_SEQ1 = 1; // Enable EVASOC to start SEQ1
AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1 = 1; // Enable SEQ1 interrupt (every EOS)
EvaRegs.T1CMPR = 0x0380; // Setup T1 compare value
EvaRegs.T1PR = 0x07FF; // Setup period register
EvaRegs.GPTCONA.bit.T1TOADC = 1; // Enable EVASOC in EVA
EvaRegs.T1CON.all = 0x1042; // Enable timer 1 compare (upcount mode)
init_eva();
for(;;);
}
void init_eva()
{
EvaRegs.T1CNT = 0x0000; // Timer1 counter
EvaRegs.T1CON.all = 0x1042;
EvaRegs.ACTRA.all = 0x0666;
EvaRegs.DBTCONA.all = 0x0000; // Disable deadband
EvaRegs.COMCONA.all = 0xA600;
}
interrupt void adc_isr(void)
{
input1[ConversionCount] = (AdcRegs.ADCRESULT0 >>4)/2;
input2[ConversionCount] = (AdcRegs.ADCRESULT1 >>4);
EvaRegs.T1CMPR = input1[ConversionCount] + input2[ConversionCount];
if(ConversionCount == 256)
{
ConversionCount = 0;//加软件断点
c++;
if(c==2)
{ EvaRegs.CMPR1 =input1[ConversionCount] ;
EvaRegs.CMPR2 = input1[ConversionCount];
EvaRegs.CMPR3 = input1[ConversionCount];
c=0;}
}
else ConversionCount++;
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1; // Reset SEQ1
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1; // Clear INT SEQ1 bit
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Acknowledge interrupt to PIE
return;
}
本实验结果为SPWM波形:波形如下图所示: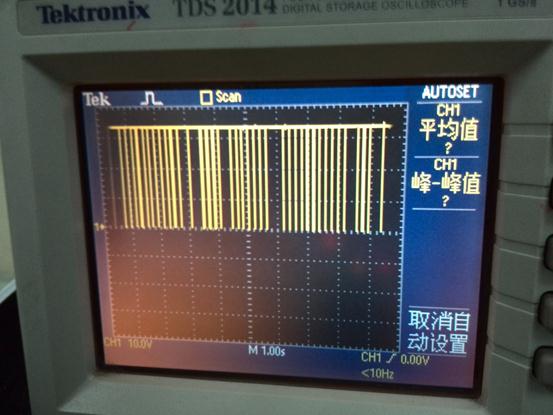
心得体会:
通过这些实验的设计与操作,我们深深体会到DSP的理论知识与实践相结合的重要性。在老师的指导下,我们完成了DSP的所有实验,并学会了CCS 3.1版软件,DSP仿真器,E300实验箱,DSP-54XP CPU板等的基本操作,掌握了外部中断的处理方法,键盘的基本编程方法、Liquid Screen 的基本编程方法、CUP定时器中断方式控制程序流程A/D转换模块的使用、PWM波的使用方法,同时非常感谢老师和同学们的帮助。