类人型机器人发展现状研究
机械0703 沈志刚 3070301073
摘要:本文主要对类人型机器人的主要技术方面发展进行了描述,主要对类人型机器人的视觉系统,以及行走跑步技术方面的相关进展研究进行了描述。
关键词:类人型机器人 视觉系统 步行系统
引子:随着科学与技术的发展,社会的进步,从工业机器人、带有感觉的机器人到智能机器人,机器人已成为21世纪具有代表性的高技术,综合涉及机械学、力学、电子学、生物学、控制论、计算机、人工智能、系统工程等多学科领域。对类人型机器人的研究是机器人研究的最高境界。仿人机器人(Humanoid Robot)又称为拟人机器人(Anthropomorphic Robot)。顾名思义,“仿人”的意义在于机器人具有类人的感知、决策、行为和交互能力。即不仅有类人的外形外观、类人的感觉系统、类人的智能思维方式、控制系统及决策能力,更重要的是其最终表现出来的“行为类人”。
视觉系统
我们人类的视觉系统基于成像原理,再经过复杂的大脑处理,感知物体的形状轮廓以及距离。我们闭上一只眼睛看物体的时候不容易感知物体离我们的距离。当然,目前,关于固定的单目视觉测距的方法有多种研究成果。通过视觉成像原理,利用三角转换公式,使目标物在图像坐标系中的像素位置转化为实际坐标系中的位置,并且同时
获得机器人与目标物的垂直与水平距离,也可以利用三维重建算法和分段控制策略计算目标物距离,融合激光传感器信息获得目标物的精确距离,利用激光反馈信息控制修正摄像头仰角,再通过比较激光测得的距离和图像测距的阈值,获得当前的真实距离值。当然,人是运动的,对于解决机器人在运动过程中的正常视觉系统,基于P&T舵机台人形机器人的利用把摄像头安装在由两个舵机组成的转动平台上,通过舵机的转动,带动摄像头在水平(T)方向和垂直(P)方向上运动解决了,机器人在旋转状态下的单目测距问题。可是这还远远不够,在目前比较能够显示机器人控制水平和协调水平的机器人足球赛中,利用全局视觉系统来实现机器人的控制,但这不是单纯的从机器人自身角度出发,主要充当眼睛的摄像头并没有设置在机器人自己身上,也就是说,机器人的视觉还是由外部控制的。在针对仿人足球机器人视觉需求,提出一种同时进行色块分割和特征提取的目标识别算法和一种基于仿人机器人物理模型的单目定位方法。目标识别算法采用八邻域法对图像进行边缘跟踪完成色块分割,同时计算边缘点几何信息得到图形特征,并应用辐射对称算法提高物体识别准确度,其处理效率比普通方法提高近一倍。目标定位算法结合摄像机小孔成像模型和类人型机器人三连杆模型,可以精确定位视觉范围内的目标。在自主仿人足球机器人系统中的成功应用表明,所提的目标识别算法和定位模型具有较好的效果。要机器人的视觉系统达到像人一样灵活,并不是不可能的它需要的一系列技术的跟进,在摄相技术已经发展到如今的地步。
步行系统
运动规划一直是类人型机器人研究的一个焦点,如Takanishi等人、Hirai等人、Huang等人都提出了基于ZMP(零力矩点)稳定判据的运动步态规划方法。这些方法是通过建立运动解析方程并求解运动轨迹以得到类人型机器人各关节轨迹。其优点是易于满足机器人的机械约束条件、运动学及动力学稳定性条件,并能使运动轨迹平滑。但是 ,对于人类的复杂动作,如人类舞蹈和体育运动等,如果仍然采用这种方法,运动方程解析式不仅复杂,建立困难,而且有时难以求解,甚至无解。人体动作可以看成是对类人型机器人的示教动作,类人型机器人动作不仅需要满足运动学及动力学约束条件,而且希望类人型机器人动作与人体动作具有很好的相似性,从而完成与人类一样的各种优美动作。我国的类人型机器人表演太极拳对提出了利用类人型机器人模仿人体运动的相似性函数,讨论了运动学约束,给出了满足运动约束条件这一方法进行了验证。太极拳运动身体重心平稳,姿势自然,整套动作连贯灵活,姿势中正平稳,动作协调柔和,速度均匀和缓。其运动特征: 1)没有大冲量的运动; 2)没有跳跃动作;3)没有快速旋转。但是,对于动作快点,力量幅度再大一点的机器人的表演,可以吗?为此人类对跑步机器人进行了研究,利用建立惯性坐标系、参考坐标系和物体坐标系,再根据D-H规则推导各个坐标系之间的转换矩阵,并用它们来分析正向运动学问题。通过推导机器人质心轨迹、双脚轨迹和各个关节角度之间的关系式,得到了跑步机器人逆向运动学的计
算公式。通过仿真结果表明这种方法对于求解类人型跑步机器人的正向运动学和逆向运动学问题,具有求解速度快、精度高等优点。人体运动是利用骨骼在支撑,利用肌肉来驱动,类人型机器人的最高成果应是做到与人本身没有差异,当然这是考虑到相关道德法律的情况下思考的,一些科幻影片也有提到,利用人造器官等一系列的仿人部件有机组合而成,对于肌肉,已有相关的技术研究——气动人工肌肉,人工肌肉具有变刚度特性,它的刚度可通过控制橡胶管内的气压实现,调节管内气压的大小就可改变肌肉的刚度,它刚度大小决定肌肉的驱动力。利用气动人工肌肉驱动的机器人腿的结构形式以及机器人腿的摆动控制方式,腿的驱动力和行走运动全由工控机控制实现。这种技术不仅仅用于人腿结构,对类人型机器人需要驱动力的地方也可以进行实现。对于运动性强一点的机器人几乎都有专门的设计,但是类人型机器人要达到人本身那种适应性还很难。
类人型机器人发展未来
目前,人形机器人向着两个方向发展,一是外形上向着与人类的细部特征相同的方向发展;另一个是功能上接近真实人类,具备和人类一样的运动能力和灵活性,对环境的判断能力。目前这两个方面都取得了显著的成果,但两方面的结合似乎还存在着一些难题,比如,如何提高机器人的关节灵活性与减少和简化机器人关节结构的矛盾,以及如何提高行走效率的问题等等。但随着技术的进步以及各种新型工程材料的运用,这些矛盾会在不远的将来得到解决。
[1]叶军. 类人型机器人腿的探讨[J]. 机械,2003.
[2]魏航信,刘明治,王淑艳,赵丽琴,. 学分析[J]. 中国机械工程,2006.
[3]虞汉中,冯雪梅,. [J]. 机械工程师,2010.
[4]魏博宇,李科杰,高峻峣,范鹰,. 机标定[J]. 微计算机信息,2009.
[5]杜鑫峰,熊蓉,褚健,. 确定位[J]. 浙江大学学报(工学版),2009.
[6]彭永强,李祖枢,薛方正,. 觉测距[J]. 计算机测量与控制,2009.
[7]石宗英,徐文立,杜继宏,温旭. 控制系统[J]. 计算机工程与应用,2002.
第二篇:机器人设计论文
绿化植树机器人设计
摘要:
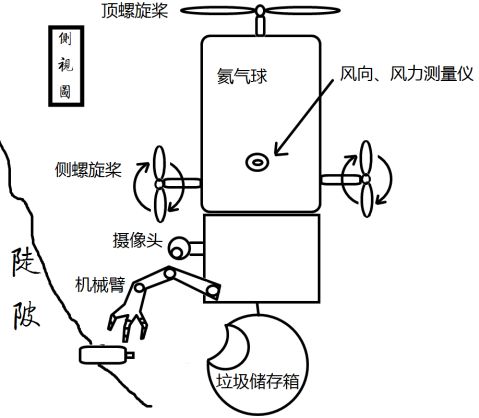
这个机器人是针对大量绿色植树而设计的,利用机械四足作为其活动方式,机器人通过视频识别系统在有限范围内对地形与植被作出判断,然后通过自动行走系统移动到目标地点前面,再通过机械手取出携带的植物幼苗,通过这个可以360度旋转的机械臂进行种植工作,机械臂可以进行种植、培土、等工作。种植完成后还将用一层可分解的塑料薄膜覆盖植物幼苗,保证其在能够自行成长前的安全。
关键词:
绿化植树、四足行走、山坡作业、视频识别、机械臂操作
设计背景:
地球现在正面临着绿色植被在不断减少的危机,而人类也因为这样要面对日益严峻的环境问题。大量植树还原绿色植被是一个相当重要的手段来解决这个难题,但是依靠人力去做的话,效率始终不够高。所以在这里我想设计一个专门用于大作业量的绿化植树机器人。
设计思路:
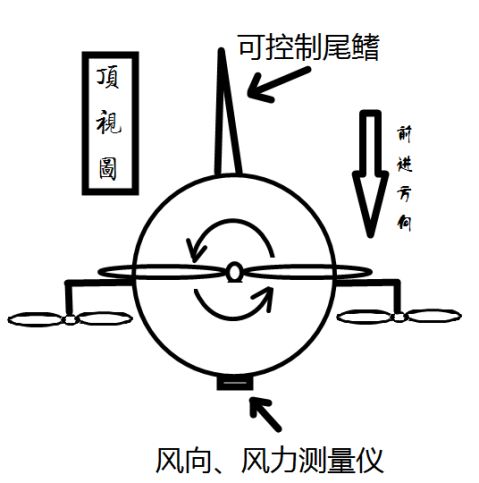
这个机器人,是需要面对山坡这样的陡峭地形的,由于特殊的使用环境,机器人的活动方式要求能够灵活的应对颠簸不平的土地,机械四足需要能够根据不同的地势调整四足的高度,确保平稳的行走,这种活动方式才能使机器人轻松到达山崖大部分位置。移动起来必须十分的轻巧,以避免对其他植物的伤害。由于这个机器人对视频识别有着较高的要求,所以必须在这方面有所突破,同时当发现有杂草或者有害植物的时候,还可以通过高温蒸汽将其杀死,来保证种植的植物幼苗的生长。360度旋转的机械臂可以保证种植过程的顺利进行。
详细具体设计方案:
一. 整体结构:
1. 整个机器人分成上下两大部分,上部分是机械手臂,主要实现机器人的整个种植
操作,下部是机器人的机身和四足,包括:植物幼苗存放仓、红外线距离测量
仪、摄像头、电脑处理系统。
2. 机器人是通过电力驱动的,所以必须携带储电池,也是安装在机身。
二. 中央处理系统:
机器人的机身将安装一个中央处理系统,作为机器人的大脑,它主要调节机器人三大系统:机械四足行走系统、机器人视觉系统、机械臂控制系统。中央处理系统要接收和分析红外线距离测量仪、摄像头、机械臂传感器等反馈信息,以及控制四足的行进系统、机械臂操作等。
三. 机械四足行走系统:
1. 机械四足的形状:
一开始的时候,我曾经很困惑于如何把握行走稳定与行走速度之间的平衡,后来设想出仿人类四肢的关节加上圆形的脚盘这个方案,总体感觉可以满足行走的需要。
2. 如何实现行进:
参考了机械小狗的设计,将机械四足连接在机器人的中央处理系统而成为一个整体,接受中央处理系统的控制。每次改变一个机械足的位置,实现整个机器人的行
走。
3. 如何保持位置稳定:
在机器人机身安装有3个红外线距离探测器,当机器人识别到了目标之后,三个探测器同时从3个方向测量其与目标的实时距离,这样就可以确定机器人和目标的相对三维位置。确定了相对位置之后,将数据传送给中央处理系统。再次调节四足关节处的角度以及脚盘关节处的角度,让机器人可以平稳的站立。
四. 机器人视觉系统:
1. 识别原理:
当机器从人移动到距离目标五米范围内,就开始识别目标的过程了。负责识别目标地点的摄像头就安装在机身上。
识别的工作原理是根据环境颜色和形状的不同作判断,再通过视频摄像和经过中央处理系统程序计算识别出来的。
2. 摄像头要求:
由于工作需要,摄像头的视角范围必须足够大。因此摄像头的形状设计为圆球形,好像眼球一样可以转动。
五. 机械臂夹持系统:
当目标已经识别出来之后就应该开始收集工作了。这个机器人的收集垃圾的工作是通过外夹式机械臂来完成的。
1. 手指类型:结合课堂知识,机械臂的手指类型选择是由被握持物件的形状、尺寸、
重量、材质及表面状态的不同而决定的。由于这个机器人针对的目标是装有植物幼苗的器皿,因此机械手指的设计采用针对圆柱形物件的特殊中空手指,你也可以说没有手指,可以直接将圆柱状的幼苗器皿卡住,种入泥土中。另外内面将采用柔性材料镶衬橡胶来增加摩擦力。
2. 驱动装置:采用直流伺服电机驱动机械臂的各个关节。
3. 除草系统:通过识别系统识别出杂草或者有害植物的时候,还可以通过手臂中的
高温蒸汽将其杀死,来保证种植的植物幼苗的生长。
六. 植物幼苗存放仓:
植物幼苗存放仓将安装在机器人机身上部,以轻型塑料制作,为仓盒状,可以有透明的材料遮挡恶劣的天气环境。仓的下部安装有平衡测试仪器,防止装幼苗的时候由于重心变化而导致机身倾斜。
七. 可能遇到的实际问题:
这只是一个机器人的理论设计而已,我也想到了一些实际上可能遇到的问题,比如:具体的行走效率有多高?遇到坡度太大的地形,如何保证安全的攀登上去?机器人是采用电力驱动的,但电池的体积和质量都不能太大,如何可以保证电力的持久供给?
简易设计图: