测试技术项目 ——空气PM2.5含量测试仪

指导老师:xxx 班级:xxx 姓名:xxx xxx
20xx年11月
一、工作原理
(1) PM2.5的检测方法
细颗粒物(pm2.5)及pm10的检测方法:光散射、β射线和微重量天平原理
光散射检测原理:当光照射在空气中悬浮的颗粒物上时,产生散射光。在颗粒物性质一定的条件下,颗粒物的散射光强度与其质量浓度成正比。通过测量散射光强度,应用质量浓度转换系数K值,求得颗粒物质量浓度。
浓度计算公式:C=(R-B)K
C质量浓度值mg/m3 R仪器测量值 计数/分(CPM ) B 仪器基底值 计数/分(CPM) K质量浓度转换系数 mg/m3乘以CPM
质量浓度转换系数K


考虑到实际情况,我们小组决定选择使用光散射的可见光光散射的检测方式来检测PM2.5的含量。虽然这样的方式对于最终的检测结果精度有一定的影响,但在日常生活中使用应该是可行的。
(2)检测仪器工作原理图
图1 检测仪器的总体电路图
图2 外接测试电路部分
如上图所示,在测试电路部分,可在单片机中编入相应程序从而在液晶模块显示数值和对应空气质量水平,必要时可通过屏幕输出信息进行空气质量报警。如果需要进一步分析数据,则可以在测试电路部分将单片机和液晶模块换成基于PC操作的测试电路,使之与计算机相连接,用对应的软件分析数值得到图表等。
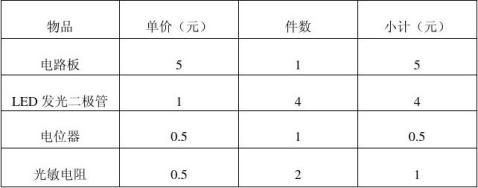
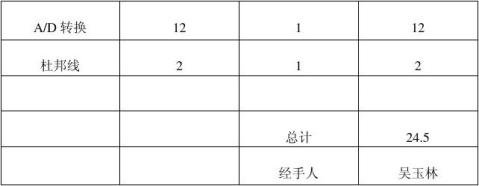
二、物品报价
三、程序代码 /*************用
#define MAIN_Fosc
11059200L
//定义
户
系
统
配
置
**************/
主时钟, 模拟串口和和延时会自动适应。5~35MHZ
/*************以 #include #define
#define uint
sfr P1ASF = 0x9D;//12C5A60AD/S2系列模拟输入(AD或LVD)
下
宏
定
义
用
户
请
勿
修
改
**************/
"reg51.H" ucharunsigned char unsigned int
选择
sfr ADC_CONTR = 0xBC;
sfr ADC_RES = 0xBD;
sfr ADC_RESL = 0xBE; //带AD系列 //带AD系列 //带AD系列
//7 6 5 4 3 2 1 0 Reset Value
//sfr ADC_CONTR = 0xBC;
ADC_POWER SPEED1 SPEED0 ADC_FLAG ADC_START CHS2 CHS1 CHS0 0000,0000 //AD 转换控制寄存器
#define ADC_OFF()
#define ADC_ON
7)
#define ADC_90T
5)
#define ADC_180T
#define ADC_360T
#define ADC_540T
#define ADC_FLAG
清0
#define ADC_START
清0
#define ADC_CH0 0 (1 << 3) //自动(2 << 5) (1 << 5) 0 (1 << 4) //软件 (3 << ADC_CONTR = 0 (1 <<
#define ADC_CH1
#define ADC_CH2
#define ADC_CH3
#define ADC_CH4
#define ADC_CH5
#define ADC_CH6
#define ADC_CH7
/************* 本地变量声明 **************/ sbit P_TXD1 = P3^1;
sbit lcden=P2^2;
sbit lcdrs=P2^0;
sbit jd=P2^1;
uchar num;
uchar code table[]="0123456789";
uchar code table_1[]="PM 2.5:"; //"Voltage: . uint flag1;
/************* 本地函数声明 **************/ void Tx1Send(uchar dat);
void PrintString(unsigned char code *puts); 1 2 3 4 5 6 7 V";
void
uintadc10_start(uchar
delay_ms(unsigned char ms); channel);//channel = 0~7
void write_com(uchar com) {
}
void write_data(uchar date) {
lcdrs=1;
择读命令模式
P0=date;
读的数据赋给P0口 lcdrs=0; P0=com; delay_ms(5); lcden=1; delay_ms(5); lcden=0; //选 //将
delay_ms(5);
//稍作延时,以待数据稳定 lcden=1;
能端给一个高脉冲,因为初始化中已经将lcdrs置零 delay_ms(5);
//稍作延时,以待数据稳定 lcden=0;
使能端置零,以完成高脉冲
}
void disp_1602(uint num)
{
i,j,k;
i=num/100;
num=num-i*100 ;
j=num/10; //使 //将uint
Tx1Send('2'); Tx1Send('M'); Tx1Send('P'); write_data(table[k]); write_com(0x80+11); write_data(table[j]); write_com(0x80+10);; write_data(table[i]); write_com(0x80+8); k=num; num=num-j*10;
}
/********************* 主函数 *************************/ void main(void)
{ Tx1Send(' '); Tx1Send(' '); Tx1Send(table[k] ); Tx1Send(table[j] ); Tx1Send(table[i] ); Tx1Send('='); Tx1Send('5'); Tx1Send('.');
uint
float h;
uchar f,s,c,l;
jd=0;
init();
// init();
// write_com(0x80);
//PrintString("****** STC12C5A60S2系列ADC程序******\r\n"); //上电后串口发送一条提示信息 P1ASF = (1 << ADC_CH0);
//12C5A60AD/S2系列模拟输入(AD)选择 ADC_CONTR = ADC_360T | ADC_ON; write_com(0x80);
for(num=0;num<14;num++) {
write_data(table_1[num]);
delay_ms(5);
} j=0; 2011-02-27
while(1) { delay_ms(50);
adc10_start(3);
ADC
h=(float)j/225*1000; j=(int)h; f=j/1000; s=j%1000/100; c=j%100/10; l=j%10; delay_ms(50); j = // P1.3
4500)
if(j >= disp_1602(400);
2500)
disp_1602(200); if(2500<j<4500) disp_1602((j-2500)/10+200); if(4000<j) write_com(0xc0); write_data('W'); write_data('a'); write_data('r'); if(j <= {
write_data('n');
write_data('i');
Tx1Send('a');
Tx1Send('r');
Tx1Send('n');
Tx1Send('i');
Tx1Send('n');
Tx1Send('g');
write_data('n');
write_data('g');
Tx1Send('W');
write_com(0xc0);
write_data(' ');
write_data(' ');
write_data(' ');
write_data(' ');
write_data(' ');
write_data(' ');
write_data(' ');
} else {
}
}
}
/********************* 做一次ADC转换 *******************/ uintadc10_start(uchar
{
//
if(ADC_CONTR & ADC_FLAG) ADC_CONTR &= ~ADC_FLAG; { uint uchar ADC_RES = 0; ADC_RESL = 0; ADC_CONTR = (ADC_CONTR & 0xe0) | ADC_START | channel; for(i=0; i<250; i++) //13T/loop, 40*13=520T=23.5us @ 22.1184M i = 5000; do{ adc; i; //channel = 0~7 channel)
adc = 0; //
adc = (ADC_RES << 8) | //ADRJ_enable()
adc = (uint)ADC_RES;
adc = (adc << 2) | (ADC_RESL & 3);
return
}while(--i);
return
}
void delay_ms(unsigned char ms)
{
unsigned int i;
do{
i = MAIN_Fosc / 14000;
//ADC_RESL;adc; } 1024;
while(--i) ; //14T per loop
}while(--ms);
}
/********************** 模拟串口相关************************/
void BitTime(void)
间函数
{
uint i;
i = ((MAIN_Fosc / 100) * 104) / 140000L - 1; 根据主时钟来计算位时间
while(--i);
}
//模拟串口发送
void Tx1Send(uchar dat)
//9600,N,8,1
送一个字节
{ 数//位时 // 发函
& 1) } uchar EA = 0; P_TXD1 = 0; BitTime(); for(i=0; i<8; i++) { P_TXD1 = 1; P_TXD1 = 0; dat >>= 1; BitTime(); } P_TXD1 = 1; EA = 1; BitTime(); BitTime(); i; if(dat else
void PrintString(unsigned char code *puts)
发送一串字符串
{
for (; *puts != 0; puts++) Tx1Send(*puts); //遇到 //停止符0结束
}
第二篇:泵与风机测试技术报告
HenanPolytechnicUniversity

《泵与风机测试技术》
读书报告
学院:机械学院
学号:310904030411
姓名:高天天 班级:热能0904 日期:20xx年6月11日
目录
概要 ................................................................................................. - 1 - 泵振动原因 ................................................................................... - 1 - 泵的振动测量与评价方法标准 ................................................ - 2 - 泵的振动测量 ............................................................................... - 2 - 泵的振动评价 ............................................................................... - 5 - 泵振动测试报告内容 .................................................................. - 8 - 学习总结与收获 ........................................................................... - 9 - 附录 ................................................................................................... A 参考文献 ............................................................................................ i
I
《泵与风机测试技术》
读书报告
——泵的振动测量与评价方法
概要:
经过对《泵与风机测试技术》的学习,我了解到很多关于泵与风机测试的相关知识,例如水泵的验收试验、出厂试验、运行试验、性能试验、汽蚀试验、四象限试验和模型试验,这些试验在各方面展示了泵的特点,便于根据不同的使用工况选用最佳性能的泵,不仅节约能源,还充分的展现了可持续发展观和节能减排的时代特色。
就目前而言,举国上下现在都推广节能减排,泵耗电量占总耗全国电量的25%,能耗指标制定将逐步推行,节能等级是泵进入某些政府采购项目的最重指标之一。另外国内从事水泵生产企业达到上千家,为了满足国家相关生产规定要求以及企业提升自身研发能力和控制产品质量需要,投资建设泵试验台企业呈快速上升趋势。水泵出厂前应当进行试验,以保证其性能指标达到国家相关要求,使其在水泵领域处于优势地位。
泵在运行过程中,常常由于各种原因引起振动,严重时甚至威胁到泵的安全运转。振动的原因是很复杂的,特别是当机组容量日趋大型化时,蹦的震动问题尤为突出和重要。因而,泵的振动测量与评价方法对于泵的安全运行有着重要意义。
一、泵振动原因
蹦振动的原因是复杂而又多方面的,大致是由以下几方面内容引起的:
(1)流体流动引起的震动。由于泵内或管路系统中的流体流动不正常而引起的震动,这和泵以及管路系统的设计好坏有关,与运行工况也有关。因流体流动异常而引起的震动,
- 1 -
有汽蚀、旋转失速(旋转脱流)和冲击等方面有关。
(2)机械引起的振动。主要包括转子质量不平衡、转子中心不正、转子的临界转速、动静部件之间的摩擦、平衡盘设计不良、原动机等引起的震动。
二、泵的振动测量与评价方法标准
我国泵的振动测量与评价方法主要是参照JB/T8097-1999《泵的振动测量与评价方法》标准进行的。此标准是对JB/T8097—95《泵的振动测量与评价方法》的修订。本标准的测量方法其主要技术内容与国际标准ISO10816–1∶1995《机械振动——在非旋转部件上测量和评价机器振动》等效。本标准的评价方法保留JB/T8097—95的内容。对于含有挠性转子的一些泵在非旋转部件上测量是不完全合适的,须由ISO7919–1《非往复式机器的机械振动——旋转轴的测量与评价准则第一部分总则》给出轴振动总则来补充。本标准自2000-01-01起代替JB/T8097—95。
三、泵的振动测量
1、测量仪器
测量仪器应该具有测量振动宽频带有效值的能力,其通频响应范围至少为
10~1000Hz,根据振动准则可以要求进行位移或速度或者这二者结合在一起测量,但对于转速接近或低于600r/min的泵,其通频响应范围下限应达到2Hz。
注:如果测量仪器也用于诊断目的,频率上限有必要超过1000Hz。应当保证测量系统不受环境因素的影响。如:温度变化;磁场;声场;电源波动;传感器方位;传感器电缆长度。应特别保证振动传感器正确地被固定,而这种固定不会降低测量精度。
2、测量参数
- 2 -
1)频率范围
振动测量应是宽带,以便充分覆盖泵的频谱,其范围通常为10~1000Hz。
2)振动值
用满足要求的仪器所做测量结果叫作指定测量位置和方向上的振动值。当评价泵的宽带振动时,根据经验通常考虑振动速度的均方根值,因为该值与振动能量有关。
3)振动烈度
规定振动速度的方均根值(有效值)为表征振动烈度额度的参数。泵的振动不是单一的简谐振动,而是由一些不同频率的简谐振动复合而成的周期振动或准周期振动。
通常在两个或三个测量方向及各个测量位置上进行测量以得到一组不同的振动值,在规定的泵支承和运行条件下所测得的最大宽带值定义为振动烈度。
4)测量量
为达到本标准的目的,可使用以下的量:
a)振动位移,μm;b)振动速度,mm/s;c)振动加速度,m/s2。
一般来说,振动的宽带加速度、速度和位移之间,峰值(o–p),峰–峰值(p–p),均方根值和平均值之间没有简单的关系式。附录中将简要论述了理由,当振动谐波分量已知时,附录规定了以上量的确切关系式。
3、泵的安装与固定
1)现场调试
当验收测试在现场进行时,支承结构应该是提供给泵的支承结构。在这种情况
- 3 -
下进行测试,重要的是确保所有泵的相关部件和结构安装好。
应该注意,同一类型的泵,在不同基础或基础底层上进行振动比较,只有当这些基础具有相似动态特性时,才是有效的。
2)试验台测试
对于多种泵,因为经济上或其它原因,验收测试在试验台上进行。试验台会具有与现场测试不同的支承结构特性。这种支承结构会明显影响所测的振动,应做各种努力以保证整个试验装置的固有频率不同于泵的旋转频率或不发生任何显著的谐振。试验装置通常满足这些要求,如在机座或在靠近轴承支承或定子座的基架上,在水平方向和垂直方向测量振动值,则不应超过在该轴承上相同方向测得振动值的50%。 另外,试验装置不应引起任何主要共振频率的实质变化。如果在验收测试中存在有显著的支承共振并且不能被消除,那么振动验收测试就必须在现场完全安装的机器上进行。
4、泵的运行工况
在测量离心泵、混流泵、轴流泵等叶片泵的振动时,应在规定转速(允许偏差±5%)以及允许用到的小流量、规定流量、大流量三个工况点进行测量,不能在气蚀状态下进行测量。对于降低转速试验的振动测量,不能作为评价的依据。
对于齿轮泵、滑片泵、螺杆泵等容积泵(往复泵除外)应在规定转速(允许偏差±5%)、规定工作压力的条件下进行测量。
对液力偶合器应分别在负载、空载以及在调速范围内均匀取10个转速点进行测量,这10个点通常是最大转速的100%,90%,……10%(由于空载调速范围限制,能够测到的转速点允许不足10个。在负载试验时,对应最高转速时应达到额定负载)。
- 4 -
5、测点与测量方向
每台泵至少存在一处或几处关键部位,为了解泵的振动,我们把这些部位选为测点,这些测点应选在振动能量向弹性基础或系统其它部件进行传递的地方,泵通常选在轴承座、底座和出口法兰处。把轴承座处和靠近轴承处的测点称为主要测点;把底座和出口法兰处的测点称为辅助测点。立式泵主要测点(标号是“1”)的具体位置应通过试测确定,即在测点的水平圆周上试测,将测得的振动值最大处定为测点。每个测点都要在三个互相垂直的方向(水平、垂直、轴向)进行振动测量。
6、环境振动评价
振动测量时其周围环境条件,如温度、磁场、声场、测量点表面粗糙度、电源波动、传感器(拾振头)的方位、传感器(拾振头)的电缆长度等,都会对测量结果产生影响。
如果所测振动超过推荐的限值,那么可能就有必要停机进行环境振动测量以保证其对所观察的振动不构成明显影响,当环境振动值大于推荐限值的1/3时,应采取措施减少环境振动值。
四、泵的振动评价
1、评价振动烈度的尺度
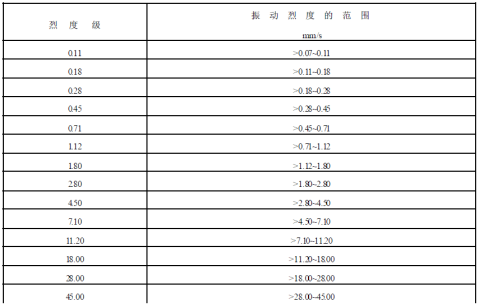
在10~1000Hz的频段内速度均方根值相同的振动被认为具有相同的振动烈度。表1中相邻两档之比为1∶1.6,即相差4dB,4dB之差代表大多数泵振动响应的振动速度有意义的变化。用泵的振动烈度查表1振动烈度级范围(10~1000Hz),确定泵的烈度级。
- 5 -
表 1
2、泵的分类
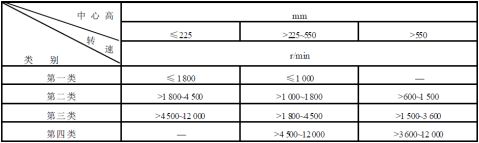
为了评价泵的振动级别,按泵的中心高和转速把泵分为四类,见表2。
- 6 -
表 2
卧式泵的中心高规定为由泵的轴线到泵的底座上平面间的距离h(mm)。
立式泵本来没有中心高,为了评价它的振动级别,取一个相当尺寸当作立式泵的中心高,即把立式泵的出口法兰密封面到泵轴线间的投影距离,规定为它的相当中心高。
3、 评价泵的振动级别
泵的振动级别分为A、B、C、D四级,D 级为不合格。
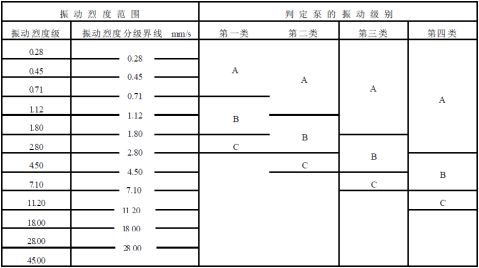
泵的振动评价方法是首先按泵的中心高和转速查表2确定泵的类别,再根据泵的振动烈度级查表3可以得到评价泵的振动级别。
杂质泵的振动评价方法,如按表2 在第一类的泵,用表3 中的第二类评价它的振动级别,依此类推。
- 7 -
表 3
五、泵振动测试报告内容
报告内容包括:
1、制造厂家、试验地点和时间
2、泵的名称、型号、出厂编号
3、测量场所的安装固定条件
4、测量仪表的名称、型号、规格、标定单位、标定日起
5、测点位置示意图
6、不同泵的工况点、不同测点、不同测量方向上振动速度的方均根值。
7、振动评价级别结论
8、振动测试报告
- 8 -
六、学习总结与收获
经过对泵的振动测量与评价方法标准的研读,我进一步了解了泵的振动对所在系统造成的危害,对能源的损耗与浪费。正如目前举国上下都推广节能减排,泵耗电量占总耗全国电量的25%,能耗指标制定将逐步推行,节能等级是泵进入某些政府采购项目的最重指标之一。泵的性能的好坏直接影响能源的利用率。因此,泵的振动测量和评价是十分必要的,不仅仅是为了节能减排,更是为了安全运行生产,为了工作人员的生命安全。
通过对《泵与风机测试技术》的学习,我对《泵与风机》课程上所学的知识有了进一步更加深刻的了解,对目前泵与风机行业有了初步认识。目前,我们应该掌握的就是知识的运用和学习的方法,作为本科生知识的积累固然重要,而具体的应用也很重要,《泵与风机测试技术》这门课就是《泵与风机》课程具体应用的展示,毕竟一年后所面对的就是就业,我想现在的我们必须具备一定的专业技能,而不仅仅是简单的理论积累。通过这门课程的学习,让我们对泵与风机印象深刻。认识来源于实践,实践是认识的动力和最终目的,实践是检验真理的唯一标准。
- 9 -
附录
多年来已认识到使用均方根速度测量以表征各种类型机器的宽范围的振动响应特性是很成功的,并且仍然这样使用着。对于单一交变波形,它们由离散的幅值和相位的谐振分量组成,并且不包含显著的随机振动或冲击分量,通过傅里叶分析,严格使用确定的数学关系式,能够说明各种基本的量(如位移、速度、加速度、峰值、均方根值、平均值等等)。这些已在别处导出,本附录不包括该方面的内容。以下概括了几个有用的关系式。
由所测的作为时间函数的振动速度记录,速度均方根值可由式(A1)计算:
vr.m.s.= ? 0?2(?)??……………………………………(A1)
式中:v(t)——与时间有关的振动速度;vr.m.s.——相应的速度均方根值;
T——采样时间,它比组成v(t)的任何主频率分量的周期长。
对于不同频率(f1,f2,…,fn)的加速度、速度和/或位移的值(分别为j=1,2,…,n),可由记录谱分析确定。
如果振动的峰–峰位移值S1,S2,…,Sn(μm)、速度均方根值v1,v2,…,vn(mm/s)、加速度均方根值(m/s2)、频率f1,f2,…,fn(Hz)已知,则表征运动的有关速度均方根值由式(A2)给出:


1?注:按照ISO 2041,频率f也可称作周期频率f。
如果振动仅由两个显著的频率分量组成,即vmin和vmax,那么拍频的均方根值vr.m.s.可近似由式(A3)计算:
A
仅对单一频率谐振分量进行振动加速度、速度或位移值的变换,使用如图A1 就能完成。如果已知单一频率分量的振动速度,那么峰–峰位移可由式(A4)计算:
S ?= 450v?A4) ??
式中:Si——峰–峰位移值,μm;
vi——振动速度均方根,mm/s。有频率fi 的成分,频率单位:Hz。

B
参考文献
[1]何川/郭立君,《泵与风机(第四版)》,北京:中国电力出版社,2008.6
[2]《中华人民共和国机械行业标准泵的振动测量与评价方法JB/T8097-1999》,北京:机械科学研究院,2000.4
[3]郑梦海,《泵测试实用技术》,北京:机械工业出版社,2006.6
i