
毕 业 设 计(论 文)
题 目
姓 名
学 号
所在学院
专业班级
指导教师
日 期 年 月 日
1
毕业设计(论文)任务书
2

毕业设计(论文)学生开题报告
3

2
4
5
开题报告(2)
6
目 录
第一章 普通车床改造成经济型数控车床总体设计方案拟定
第一节总体方案的设计内容
一 系统运动方式的确定
二 伺服系统的选择
三 执行机构传动方式的确定
四 计算机的选择
第二节总体方案设计的应用举例
一 设计任务
二 总体方案确定
三 机械传动方式
第二章 经济型数控机床进给伺服系统机械部分设计
第一节脉冲当量的选择
第二节计算切削力
第三节 滚珠丝杠螺母副的设计,计算及选型
第四节步进电机的计算及选型
第三章微机控制系统的设计
第一节 设计内容
第二节 设计步骤
第三节主控制器的选择
7
第四节 存储器扩展电路设计
第五节 步进电机驱动电路设计
第四章 结束语
参考文献
第一章 普通车床改造成经济型数控车床总体设计方案拟定
第一节 总体方案的设计内容
机床数控系统通体方案的拟定应包括以下内容:系统的运动方式的确定,伺服系统的选择,执行机构的机构及传动方式的确定,计算机系统的选择等内容。
一、系统运动方式的确定
数控系统按运动方式可分为点位控制系统,点倒直线系统和连续控制系统。如果工件相对于刀具移动过程中不进行切削,可选用点位控制方式,例如:数控钻床在工作台移动过程中钻头并不进行钻孔加工,因此数控系统可采用点位控制方式。对点位控制的要求是快速定位,保证定位精度。
如果要求工作台或刀具沿各坐标轴的运动有确定的函数关系及连续控制系统,应具有控制刀具以给定速率沿加工路径运动的功能。具备这种控制能力的数控机床可以加工各种外形轮廓复杂的零件。所以李旭控制系统又称轮廓控制系统。例如:数控铣床、数控车床等均属于此种 8
运动方式。在点位控制系统中不具有连续控制系统中所具有的轨迹计算装置,而连续控制系统中缺具有点位系统的功能。
二、伺服系统的选择
伺服系统科飞为开环控制系统、半闭环控制系统和闭环控制系统。 开环控制系统中没有反馈电路,不带检测装置,指令信号时单方向传送的,指令放出后,不在反馈回来,古称开环控制。开环伺服系统主要有步进电机驱动。开环伺服系统机构简单,成本低廉、容易掌握、调试和维修都比简简单方便。
闭环控制系统具有装在机床移动部件上的检测反馈元件。用来检测实际位移量,能补偿系统的误差,因而伺服控制精度高。闭环系统多采用直流伺服电机或交流伺服电机驱动。闭环系统造价高、架构和调试复杂、多用于精度要求高的场合。
半闭环控制系统与闭环控制系统不同,不直接监测工作台的位移量,而是用检测元件测出驱动轴的转角,在间接推算出工作台实际的位移量,也有反馈回路,其性能介于开缓和闭环系统之间。
三、执行机构传动方式的确定
为确保数控系统的传动精度和工作平稳性,在设计机械传动时,通常提出低摩擦,低惯量、高刚度、无间隙、告谐振以及有诗意的阻尼比的要求。在设计过程中应考虑以下几点:
(1) 尽量采用低摩擦的传动和导向元件。如采用滚珠丝杠螺母传动副 9
(2) 尽量消除传动间隙。例如采用消隙齿轮
(3) 提高系统刚度。缩短传动链可以提高系统的传动刚度、减小传动
链误差。可采用预紧的方法提高系统的刚度。
四、计算机的选择
微机数控系统是由CPU、存储器扩展电路、I10接口电路伺服电机驱动电路、检测电路等几部分组成
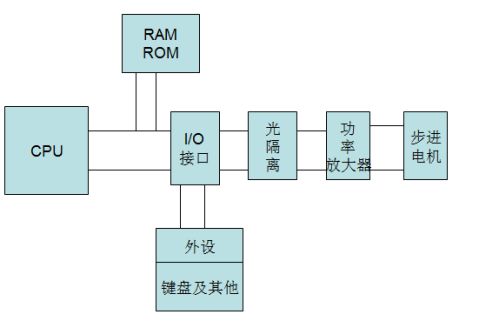
。
微机是数控系统的核心,其他装置均是在微机的指挥下进行工作的。系统功能和系统中所用微机直接相关。数控系统对微机的要求是多方面的,但主要是字长和速度。目前,一些高档的CNC系统,已普遍使用32位微机,主机频率由5MHz提高到20-30 MHz,有的采用多CPU系统,进一步提高控制速度。经济型CNC系统则普遍采用8位微机。
10
第二节 总体方案设计的应用举例
一、设计任务
将普通车床改造成用MCS-51系列单片机控制的经济型数控车床。要求该车床有自动回转刀架,具有切削螺纹的功能。在纵向和横向具有直线和圆弧插补功能。系统分辨率
设计参数如下:
最大加工直径 288mm
最大加工长度 630mm
快进速度
纵向 2.16m/min
横向 1.08m/min
最大切削进给速度
纵向 0.72 m/min
横向 0.36 m/min
二、总体方案确定
(1)系统的运动方式与伺服系统的选择
由于改造后的经济型数控车床应具有定位,直线插补,顺圆和逆圆插补,暂停,循环加工,公英制螺纹加工等功能,故应选择连续控制系统。有雨经济型数控机床加工精度要求高,为了降低成本,故采用步进 11
电机开环控制系统。
(2)计算机系统
根据机床要求,采用8位微机,由于MCS-51系列单片机具有集成度高,可靠性好,功能强,速度快,抗干扰能力强,性能价格比高等特点,决定采用MCS-51系列的8031单片机扩展系统。
控制系统由微机部分,键盘及显示器,I10接口及光隔离电路,步进电机功率放大电路等组成。系统的加工程序和控制命令通过键盘操作实现,显示器采用数码管显示加工数据及机床状态等信息。
三、 机械传动方式
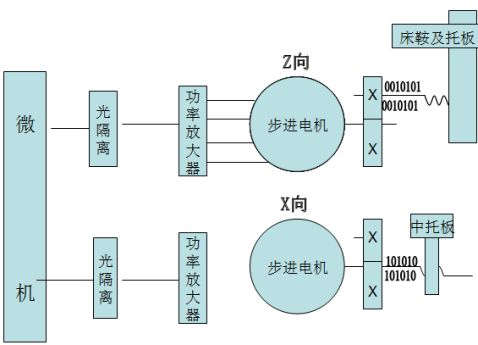
为实现机床所要求的分辨率,采用步进电机经齿轮减速而传动丝杠选用滚珠丝杠螺母副,同时,齿轮传动也要消除间隙的结构。
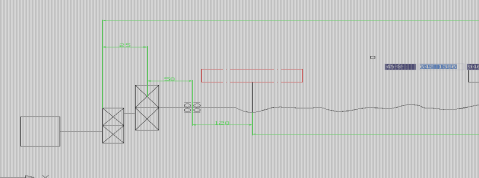
1、 绘制总体方案框图(图1-1)
12
图1-1 经济型守护空车床总体方案框图
根据设计任务的要求。决定采用点位控制,用步进电机驱动的开环控制系统。
第二章 经济型数控机床进给伺服系统驱动的开环控制系统
伺服系统机械部分设计计算内容包括:确定系统的负载,确定系统脉冲当量,运动部件惯量,计算空载起动反切削力矩计算,确定伺服电机,传动及导向元件的设计,计算及选用,会直接写部分装配图及零件工作图等。
1、 C6136A型普通车床微机数控化改造设计
将一台C6136型普通车床改造成经济行为及数控车床,采用MCS-51系列单片机控制系统,步进电机开环控制,具有直线和圆弧插补功能,其主要设计参数如下:
加工最大直径: 288mm
最大加工长度 630mm
刀架快速速度:
纵向 2.16m/min
横向 1.08m/min
最大进给速度:
纵向 0.72 m/min
横向 0.36m/min
主电机功率 4.5kw
13
第一节 脉冲当量的选择
一个进给脉冲使机床运动部件的位移量称为脉冲当量,也称为机床的最小设定单位。根据机床精度要求确定脉冲当量,最小:0.01mm/脉冲,横向:0.005mm/脉冲。
第二节 计算切削力
总车外圆:
主切削力(横向进给传动系统的计算)
主电机功率4.5KW,最大工件直径D=288mm,主轴计算转速n=85r/min,
刀具切削速度V=πDn/60=(3.14*288*0.001*85)/60=1.28m/s
取机床的机械效率η=0.8,
Fz=ηPm/V*0.001=0.8*4.5*1000/1.28=2812.50(N)
各切削分力:
Fx=0.25Fz=0.25*2812.50=703.13(N)
Fy=0.4*Fz=0.4*2812.50=1125(N)
如图 纵切和横切时切削力的示意图
14
纵车外圆

横切外圆
二导轨摩擦力计算:
1.垂直切削分力Fv=Fz=2812.50(N),
横向切削分力Fc=Fx=1125(N),
横向移动部件的重力W=450(N),m=46kg查表2-3, 镶条紧固力fg=1500(N),贴塑导轨μ=0.15,
Fμ=μ(W+Fv+Fc+fg)
=0.15*(450+1500+2812.50+1125)=883.13(N)
2.不切削时,导轨摩擦力Fμo和Fo:
15

Fμo=μ(W+fg)=0.15*(450+1500)=292.50(N)
Fo=μo(W+fg)=0.2*(450+1500)=390(N)
3.计算滚珠丝杠螺母副的轴向负载力:
1)最大轴向负载力Famax=Fy+Fμ=1125+883.13=2008.13(N)
2)最小轴向负载力Famin=Fμo=292.5(N)
4.确定进给传动系统链的传动比i和传动级数,
取步进电机步距角α=1.5°,滚珠丝杠导程Lo=6mm,脉冲当量δp=0.005mm/脉冲
I=αLo/(360δp ) =1.5*6/(360*0.005) =5
查图2-42,图2-43,减速器采用2级传动,
传动比,i1=2,i2=2.5,传动齿轮的齿数Z1=20,,Z2=40,Z3=20,Z4=50,
模数m=2,齿宽b=20mm。
普通车床数控改造计算简图
第三节 滚珠丝杠螺母副的设计,计算及选型
滚珠丝杠动载荷计算与直径估算:
数控车床的预期工作时间Lh=1500h,滚珠丝杠的当量载荷 16
Fm=Famax=2008.13(N),查表2-28得,载荷系数fw=1.3,查表2-29,初步滚珠丝杠的精度等级为1级,取精度系数为fa=1,查表2-30,可靠性系数fc=1,滚珠丝杠的当量转速n=nmax(该转速为最大切削进给速度Vmax时的转速),已知Vmax=0.36m/min,滚珠丝杠的基本导程Lo=6mm,则
nmax=1000Vmax/Lo=1000*0.36/6=60r/min
Cam= (60nLh) Fm*fw/ (100fa*fc)
=(60*60*1500)*2008.13*1.3/(100*1*1)=4580.1(N) 按精度要求确定允许的滚珠丝杠的最小螺纹底径d2m,
1)根据定位精度和重复定位精度的要求估算允许的滚珠丝杠的最大轴向变形,已知车床横向进给系统的定位精度为20um,重复定位精度为4um,
δmax1=(1/3-1/2)*4=2-2.66um
δmax2=(1/5-1/4)*20=4-5um
取计算结果较小值,即δmax=2.66um。
2)估算允许的滚珠丝杠的最小螺纹底径d2m,
滚珠丝杠采用一端固定,一端游动的支承方式,滚珠丝杠螺母副的 两个固定支承之间的距离为:
L=行程+安全行程+2*余程+螺母长度+支承长度=(1.2-1.4)行程+ (25-30)Lo
取:
L=1.4行程+30Lo=1.4*200+30*6=460mm
17 1/31/3
则:
d2m≥0.078*(Fo*L/δmax)=0.078*(390*320/2.66)=16.89mm 初步确定滚珠丝杠螺母副的规格型号:
Lo=6mm,d2=27.9>d2m=16.89 mm
Ca=1300>4580(N)
Do=32mm Lo=6mm 选择型号:FFZ3206-3
Ca=1300N ,d2=27.9mm
6.滚珠丝杠螺母副的承载能力校验
1)滚珠丝杠螺母副临界压缩载荷Fc的校验
已知d2=27.9mm,滚珠丝杠螺母副的最大受压长度L1=313mm,
丝杠垂直安装时取:
K1=1/3,查表2-44得K2=2,
则:
Fc=K1K2*d2/L1*10=1/3*2*27.9/313*10=412322.35(N)
本车床横向进给系统滚珠丝杠螺母副的最大轴向载荷 Famax=2008.13(N)远小于其临界压缩载荷Fc,故满足要求。
2)滚珠丝杠螺母副临界转速nc的校验
滚珠丝杠螺母副临界转速的计算长度L2=337mm,其弹性模量 E=2.1*10
354254251/21/2Mpa。密度ρ=1/g*7.8*10?5N/mm,重力加速度g=9.8*10mm/s,
18 2
最小惯性矩:I=π/64*d2=3.14/64*27.9=29728.05mm 最小截面积:A=π/4*d2=3.14/4*27.9=611.05mm
取K1=0.8,有表2-44得λ=3.927,则:
Nc=K1*60λ2222444/(2πL2)*(EI/ρA) 21/2
=0.8*60*3.927^2/(2*3.14*337^2)*
(2.1*10*29728.05*9.8*10/(7.8*10*611.05)) =37185r/min
本横向进给传动链的滚珠丝杠螺母副的最高转速为60r/min,远小于其临界转速,故满足要求。
滚珠丝杠螺母副额定寿命的校验
查表A-3得滚珠丝杠的额定动载荷Ca=1300N,已知轴向载 Fa=Famax=2008.13N,滚珠丝杠转速n=nmax=60r/min,运转条件系数fw=1.2,
则:
L=(Ca/(Fafw)) *10
=(1300/(2008.13*1.2)) *10
= 1.57*10r
Lh=L/(60n)=1.57*10/(60*60)=43611h
本机床数控化改造后,滚珠丝杠螺母副的总工作寿命Lh=43611h>1500h,故满足要求。
7.计算机械传动系统的刚度
1)计算滚珠丝杠的拉压刚度Ks
丝杠支承方式为一端固定,一端游动。已知弹性模量 19 88363653?51/2
E=2.1*10Mpa,滚珠丝杠底径d2=27.9mm。当滚珠丝杠螺母副中心至固定端支承中心的距离a=LY=313mm时,滚珠丝杠螺母副具有最小拉压刚度Ksmin,
则:
Ksmin=πd2E/(4LY)*10=1.65*10*27.9/313=410.34N/um 当a=Lj=113mm时,滚珠丝杠螺母副具有最大拉压刚度Ksmax, 则:
Ksmax=πd2E/(4Lj)*10^-3=1.65*10*27.9/113=1136.62N/um 计算滚珠丝杠螺母副支承轴承的刚度Kb
已知滚动体直径dQ=5.935mm,滚动体的个数Z=15,轴承的最大轴向工作载荷FBmax=Famax=1626.511(N),则由表2-45,表2-46得: Kb=2*1.95*?√(dQZFamax)
=2*1.95*?√(5.953*15*2008.13)=542.38N/um
计算滚珠与滚道的接触刚度Kc
查表A-3的滚珠与滚道的接触刚度K=569N/um,额定动载荷Ca=13000N,已知滚珠丝杠上承受的最大轴向载荷Famax=2008.13N 则:
Kc= K(Famax/(0.1Ca))
=569*(2008.13/(0.1*13000)) =657.75N/um
计算进给传动系统的综合拉压刚度K
由式(2-47a)的综合拉压刚度的最大值为:
20 1/31/3222222?3225
1/Kmax=1/1136.62+1/542.38+1/657.75=0.0041
Kmax=245N/um
由式(2-47b)的综合拉压刚度的最小值为:
1/Kmin=1/410.34+1/542.38+1/657.75=0.0056
Kmin=177N/um
计算滚珠丝杠螺母副的扭转刚度KΦ
扭矩作用点之间的距离L2=387mm,已知滚珠丝杠的剪切模
量G=8.1*10Mpa,d2=27.9mm
则:
KΦ=πd2G/(32L2)
=3.14*(27.9*10)*8.1*10*10/(32*387*10)
=12444.30KNm/rad
驱动电动机的选型与计算:
1.计算折算到电机轴上的负载惯量
1)计算滚珠丝杠密度ρ=7.8*10kg/cm,
则:
Jr=∑ 0.78*10DjLj =0.78*10*(3.6*39.4+3*15.4+2.5*4.7)
=5.85kg/cm
计算折算到丝杠轴上的移动不见的转动惯量Jl
Jl=m(L/2π)=46*(0.6/(2*3.14)) =0.42kg/cm
3)计算各齿轮的转动惯量
21 2222?3444?34?33?3446?344
Jz1=Jz3=0.78*10*4*2=0.4kg.cm
Jz2=0.78*10*8*2=6.4kg.cm
Jz4=0.78*10*10*2=15.6 kg.cm
4)由式(2-66)计算加载电动机轴上总负载转动惯量
Jd=Jz1+1/(i)*(Jz2+Jz3)+ 1/(i)*(Jz4+Jr+JL)=0.4+1/4 ×(6.4+0.4)+1/25(15.6+5.85+0.42)kg?cm
=2.9748 kg?cm
2.计算折算到电机轴上的负载力矩。
1)计算折算到电机轴上的负载力矩Tc.
已知切削状态轴向负载力22?342?342?34222Fa=Famax=2008.13,L=6mm=0.006m,i=5,
进给传动系统的总效率
η=0.85,
则:
Tc=Fa*L/(2π*η*i)=2008.13×0.006/(2×3.14×0.85×5) =0.45N?m
2)计算折算到电机轴上的摩擦负载力矩Tμ
已知:Tμ0=390N,
则:
Tμ= Tμ0*L/2πηi
=390×0.006/(2×3.14×0.85×5)
=0.088 N?m
22
3)计算滚珠丝杠预紧力Fp产生的并折算到电机轴上的附加负载力矩Tf 已知滚珠丝杠螺母副的效率η0=0.94,滚珠丝杠螺母副的预紧力 Tp为:
Fp=1/3Famax=1/3×2008.13=669.34N
由式(2-56)得:
Tf=Fp*L0/ (2π*η*i)*(1-ηo)
= 669.34*0.006/(2*3.14*0.85*5)*(1-0.94)
=0.0178N?m
4)折算到电机轴上的负载力矩T的计算
空载时,
由式(2-57a)得:
Tkj=Tμ+Tf=(0.088+0.0178)=0.1058N?m
切削时,
由式(2-57b)得:
TGj=Tc+Tf=(0.45+0.0178)=0.4678N?m
计算折算到电机轴上的加速力矩Tap
根据以上结果和表A-5,初选130BF001型反应时步进电动机,其转动
惯量Jm=4.6kgcm
Jd=2.8kgcm,对开
环系统,加速时间ta=0.05s,当当机床执行部件以最快速度 V=1200mm/min运动时电机的最高转速为:
23 2222;而进给传动系统的负载惯量
Nmax=1200*5/6=1000r/min
由式(2-59)得:
Tap=2π*i*nmax/(60*980ta)*(Jm+Jd)
=2*3.14*5*300/(60*980*0.05)*(4.6+2.8)
=2.322N.m
计算横向进给系统所需的折算到电机轴上的各种力矩
按式(2-61)计算空载启动力矩Tq
Tq=Tap+(Tm+Tf)=2.322+(0.088+0.0178)=2.4278N.m 按式(2-57a)计算快进力矩Tk
Tkj=Tu+Tj=(0.088+0.0178)=0.1058N.m
按式(2-57b)计算工进力矩TGj
TGj=Tc+Tf=(0.45+0.0178)=0.4678N.m
选择驱动电动机的型号
1)选择驱动电动机的型号
根据以上计算和表A-5,选130BF001型反应时步进电动机,其主要 技术参数如下:相数5,步矩角0.75°/1.5°,最大静转矩
9.31N.m,
转动惯量4.6kg.cm,最高空载频率3000HZ,分配方式:五相十拍,
质量9.2kg,运行频率:16000HZ。
2)确定最大静转矩Ts
Tq/Ts1=0.951
24 2
Ts1=2.4278/0.951=2.55N.m
Ts2=TGj/0.3=0.4678/0.3=1.56N.m
取Ts1和Ts2中较大者为所需的步进电动机的最大静力矩Ts,即
Ts=8.68N.m,本电机最大静力矩为9.31N.m,大于Ts=8.68N.m,
可以再规定的时间内正常启动,故满足要求。
验算惯量匹配
为使机械转动惯量达到较合理的匹配,Jl和Jm比应满足 0.25≤ Jd/Jm ≤1
因为 Jd/Jm =0.645,满足惯量匹配要求。
机械传动系统的动态分析
1.计算丝杠——工作台纵向工作系统的最低固有频率Wnc 滚珠丝杠螺母副的综合拉压刚度Ko=Kmin=179*10N/M, 机床执行部件的质量和滚珠丝杠螺母副的质量分别为M,Ms,滚珠
丝杠螺母副和机床执行部件的等效质量为Md=M+1/3Ms,已知
M=46kg ,则:
Ms=π/4*3.6*39.4*7.8*10=3.13kg
Md=M+1/3Ms=46+1/3*3.13=47.04kg
Wnc=(Ko/Md) =(179*10/47.04) =1951rad/s 25 1/261/22?36
2.计算扭转振动系统的最低固有频率Wnt
折算到滚珠丝杠轴上的系统当量转动惯量为:
Js=Ji=(4.6+2.97)*5=37.85kg.cm 已知滚珠丝杠的扭转刚度Ks=KΦ=4724.22N.m/rad ,则:
Wnt=(Ks/Js)=(47724.22/0.003785) =1117rad/s
由以上计算可知,
丝杠——工作台纵向工作系统的最低固有频率 Wnc=1524rad/s
扭转振动系统的最低固有频率
Wnt=1117rad/s
都比较高。一般按Wn=300rad/s的要求来设计机械传动系统的刚 度,故满足要求。
第四节步进电机的计算及选型
机械传动系统的误差计算与分析
1.计算机械传动系统的反向死区
已知Kmin=177*10N/m,Fo=390N,
由式(2-52)得:
2F0?1032?390?103
?36Δ=2δu=Kmin=117?10=4.41?10mm
?3即Δ=4.41?10mm<8μm,故满足要求。 61/21/22
(2)计算机械传动系统有综合拉压刚度变化引起的定位误差δ
kmax 26
由式(2-53)得:
11??6?63δkmax=F0(KminKmax)=390*(1/177*10-1/245*10)*10
=0.585*10mm
即: δkmax?3=0.585<6μm,故满足要求
(3)计算滚珠丝杠扭转变形产生的误差
①计算由扭矩引起的滚珠丝杠螺母副的变形量θ。
已知负载力矩T=Tkj=105.8N.m,扭矩作用点之间的距离L2=387mm,d2=27.9mm,则θ=7.21*10*105.8*387/27.9 =0.0048
②由该扭转变形量θ引起的轴向移动滞后量δ将影响工作的定位精度,则δ=L0θ/360=6*0.0048/360=0.00008mm=0.08um
⑷确定滚珠丝杠螺母副的精度等级和规格型号。
确定滚珠丝杠螺母副的精度等级,传统采用开环控制系统,所以,V300p+ ep≤0.8(定位系统-δ
Vup+ ep≤0.8(定位系统-δkk?24。)=0.8*(20-0.585-0.08)=15.468um )=0.8*((20-0.585-0.08)=15.468um 所以,滚珠丝杠螺母副精度等级为1级,查表2-20得:V300p=6um取螺纹长度为400mm,查表2-21,ep=7um,V
确定滚珠丝杠螺母副的规格型号
滚珠丝杠螺母副的规格型号为FFB3206-3-P2/595*394
具体参数:公称直径d0=32mm,导程L0=6mm,螺纹长度400mm,丝杠长度585mm,类型P类,精度等级1级。
第三章 微机控制系统的设计
27 up=6um,故满足设计要求。
第一节 设计内容
1.按照总体方案以及机械结构的控制要求,确定硬件电路的方案,并绘制系统电气控制的结构框图。
2.选择计算机或中央处理单元的类型。
3.根据控制系统的具体要求设计存储器扩展电路。
4.根据控制对象以及系统工作要求设计扩展I/O接口电路,检测电路,转换电路以及驱动电路等。
5.选择控制电路中各器件及电气元件的参数和型号。
6.绘制出一致清晰完整的电气原理图,图中要标明各器件的型号,管脚号及参数。
7.说明书中对电气原理图以及各有关电路进行详细的原理说明和方案论证。
第二节 设计步骤
1.确定硬件电路的总体方案。
数控系统的硬件电路由以下几部分组成;
A 主控制器,即中央处理单元cup
B 总线。包括数据总线,地址总线,控制总线
C 存储器。包括只读可编程程序存储器和随机读写数据存储器。
D.接口,即I/O输入输出接口。
第三节 主控制器cpu的选择
28
MCS-51系列单片机是集中cpu,I/O端口及部分RAM等为一体的功能性强的控制器,只需增加少量外用元件就可以构成一个完整的微机控制系统,并且开发手段齐全,指令系统功能强大,编程灵活,硬件资料丰富。本次设计选用8031主控系统。
第四节 存储器扩展电路设计
1. 存储器的扩展
单片机应用系统中扩展用的程序存储器芯片大多采用印ROM芯片。型号有;2761,其容量分别为2k,在选择芯片时要考虑cpu与印ROM所要求的读取时间。此外,还需要考虑最大读出速度,工作温度以及存储容量等因素。在满足容量要求时,尽量选择大容量芯片,以减少芯片数量以简化系统。综合以上因素,选择2764芯片作为本次设计的程序存储器扩展用芯片。
单片机规定pt接口8位地址线,因此又作为数据线使用,所以为外接存储器提高8位的地址信息,一般采用74LS芯片作为地址锁存器,并由cpu发出允许锁存信号ALE的下降沿,讲地址信息锁存入地址锁存器。
2.数据存储器的扩展
由于8031内部RAM只有16128字节,这不能满足系统要求。要求扩展片外的数据存储器,单片机应用系统数据存储器扩展电路一般采用6116,6262静态RAM数据存储器,采用设计6264芯片作为数据存储器扩展用芯片。
29
3.译码电路
在单片机应用系统中,所用外围芯片都通过总线与单片机相连。单片机数据总线分时的与各个外围芯片进行数据传送。故要进行片选控制,由于外围芯片与数据存储器采用统一编程,因此单片机的硬件设计中,数据存储器与外围芯片的地址译码较为复杂。可采用选法和全地址译码法,线选法是把单独的地址线接到外用芯片的片选端上,只需该地址线为低电平,就选中该芯片,线选法的硬件结构简单,但它所用片选线都是高地址线,它们的权值较大,地址空间没有充分利用,芯片之间的地址不连续。对于RAM和I/O容量较大的应用系统,当芯片所需要的片选信号多于可利用的地址线的时候,多采用全地址译码法,它将地位地址作为片内地址,而且译码器对高位地址进行译码,译码器输入的地址选择用作选线。
4.存储扩展电路设计
9031单片机所支持的存储系统起程序存储器和数据存储器264组成8031单片机的外存储器扩展电路。
5. I/O扩展电路设计。
(a)通用可编程接口芯片8155
8031单片机共有4个8位并行I/O接口,但供用户使用的只有P1口及部分P3口线,因此要进行I/O口的拓展。815与微机接口较简单,是微机系统广泛使用的接口芯片。
(b)键盘,显示器接口电路
键盘,显示器是数控系统常用的人机交换的外部设备,可以完成数 30
据的输入和计算机状态数据的动态显示。通常,数控系统都采用行列式键盘,即用I/O口线组成行,列结构,按键设置在行列的交点上。
第五节 步进电机驱动电路设计
(1)脉冲分配器
步进电机的控制方式有脉冲分配器实现,其作用是将数控装置送来的一系列指令脉冲按一定的分配方式按顺序输入给步进电机的各相绕组,实现电机正反转,本设计采用集成脉冲分配器YB013
(2)光电隔离电路
在步进电机驱动电路中,脉冲分配器输出的信号经放大后控制步进电机的励磁绕组中来,如果将输出信号直接与功率放大器相连,将受到电气干扰。因此在接口电路与功率放大器间加上隔离电路实现电气隔离,通常要用光电耦合器。
(3)功率放大器
脉冲分配器的输出功率很小,远不能满足步进电机的需要,必须将其输出信号放大产生足够大的功率,才能驱动步进电机真唱运转,因此必须选用功率放大器,需要根据步进电机容量选择功率放大器
第四章 结束语
31
随着微电子技术的发展,我国的机床数控化在近十年来有了很大的发展,而普通机床的数控化改造后在满足完成同样的加工任务的前提下,可大大降低技术改造的投资经费,在实际中得到广泛应用。基于对普通车床进行经济型数控改造设计过程中,我认为普通机床的数控改造具有很多的优点、必要性及其良好的发展趋势。
全功能的数控系统虽然功能丰富,但成本高,我国的一般中小企业购置困难,但是中小型企业为了发展生产,希望对原有机床进行改造,进行数控化、自动化、以提高生产效率。经济型数控机床系统就是结合现实的生产实际,我国的国情,在满足系统基本功能的前提下,尽可能降低价格。目前我国经济型数控系统发展迅速,研制了几十种简易NC系统,有力地促进了我国数控事业的发展。
改造后的车床,可手动、机动操作,操作简单,使用方便,价格低廉,其性能价格比适中;而且还能解决复杂零件的加工精度控制问题,节约大量工装费用,减轻工人的劳动强度,提高工人素质。
企业应用经济型数控对设备进行改造后,增强了企业应变能力,为提高企业竞争能力创造了条件,提高了加工精度和批量生产的能力,提高了设备自身对产品更新换代所需要的应变能力,增强了企业的竞争能力。
主要参考文献
(1)《机床设计手册》编写组.机床设计手册(第三册)【M】.北京:机 32
械工业出版社,1986.
(2)范超毅、赵天婵、吴斌方主编. 数控技术课程设计【M】.武汉 : 华中科技大学出版社2007.
(3)坂本正文.步进电动机应用技术【M】.北京:科学出版社,2010.
(4)李福生.实用数控机床技术手册【M】.北京:北京出版社,1993.
(5)廉元国,张永洪.加工中心设计与应用【M】.北京:机械工业出版社,1995.
(6)廖效果.数控技术【M】.武汉:湖北可学技术出版社,2000.
(7)吴振彪.机电综合设计基础【M】.北京:中国人民大学出版社,2000.
(8)郑堤,唐可洪.机电一体化设计基础【M】.北京:机械工业出版社,2002.
(9)王爱玲.现代数控机床【M】.北京:国防工业出版社,2003.
33