宇航推进专业综合实验报告
反馈力法微小推力测量系统
标定实验
报 告 人:孔维鹏
学 号:SY1415215
指导教师:
日 期:20##年10月12日
1、实验目的
1) 了解常见的微小推力测量方法;
2) 了解反馈力法微小推力测量系统测量原理;
3) 掌握反馈力法微小推力测量系统的标定方法;
4) 学会分析反馈力法微小推力测量系统的静态参数。
2、实验设备及功能
1) 微推力架一台;
2) 反馈电路一套;
3) 标定装置一套;
4) 电源三台;
5) 万用表一个;
6) 导线若干。
3、实验内容与步骤
3.1反馈电路接线
整个反馈电路共有处需要供电。总电路需要供电±15V,三极管需要供电
±5V,传感器需要供电24V,所有电源均是直流稳压电源。
接线时遵循红正黑负的原则,注意不要把正负极性反接,否则会导致元器件被烧毁,甚至发生爆炸。
实验桌上有三个电源,推力架后方的电源是为整个电路供电的,可以提供±15V和±12V的电压,其控制面板上有切换按钮可以切换输出电压。右侧有两个电源堆叠在一起,上方的电源是传感器电源,下方的是三极管电源。使用时先把电源的电源线连接好,然后把相应的线接到相应的电路板的接口上。电路板上除了供电电路之外还有一路磁线圈的驱动电路需要连线,该路线路是从放大电路的输出端连接至磁线圈的线圈接口。连接完成之后用万用表检查线路是否正确,有无开路情况。
3.2测量线路连接
标定时可用万用表的直流电压档进行测量。电路板已经预留了信号输出接口,直接用导线从接口处引出信号即可用万用表进行测量。
3.3安装标定装置
标定装置主要有3部分组成。分别是定滑轮、支撑装置、线、砝码盘。推力架上有安装孔,先把支撑装置安装到推力架上,再把定滑轮安装到支撑装置上,然后用线把砝码盘连接到推力架上,并使线水平放置在定滑轮的沟槽内。
3.4解锁推力架
此推力架的弹性元件为高精度的弹性轴承,为延长轴承的使用寿命,在推力架不工作时需要将其锁死,防止动架晃动。标定前需要解除其锁定。
3.5启动电源
除电路总电源只有一个电源按钮之外,其他电源在电源按钮按下之后还需按下输出按钮才能输出电压。按下输出按钮前要调整好电源的输出电压,防止烧毁元器件。
3.6标定推力架
按照附表中的要求,逐个添加砝码到砝码盘中,并观察万用表的读数,待读数稳定之后记录数据,直到完成表中的所有内容。
3.7关闭电源
依次关闭总电路的电源,传感器的电源和三极管的电源。关闭电源时先按输出按钮,再按电源按钮。
4、原始数据记录表
表 1微推力测量实验原始数据

5、推力架静态参数分析
5.1、灵敏度
选取第一组数据,以砝码质量为x轴,微推力架输出为y轴,画出正行程和反行程的微推力架输出和砝码质量关系图,如图1,图中黑色线为正行程,加载砝码质量;红色线为反行程,卸载砝码质量。

图 1第一组微推力架输出与砝码质量关系
对第一组数据进行线性拟合,结果为:TSO=83.07019 +392.15251。具体数值如表2所示:
+392.15251。具体数值如表2所示:
表 2第一组微推力架标定灵敏度分析数据

当砝码质量增加1g时,微推力架的输出增加83.07mV,取重力加速度为9.83 ,得到当推力为1mV时微推力架输出为8.45mV,即微推力架的灵敏度K为8.45mV/mN。
,得到当推力为1mV时微推力架输出为8.45mV,即微推力架的灵敏度K为8.45mV/mN。
同时,由校正决定系数Adj R-Squ等于0.99993可以看出,各个数据点——微推力架输出与挂载砝码质量之间的线性关系非常好。
5.2线性度
使用灵敏度作出理想的微推力架输出与砝码质量关系曲线,与实际的微推力架输出比较来论证静态标定中的线性度。得到数据如下表。
表 3微推力架标定线性度和迟滞性分析数据

表中:ΔLUp为正行程挂载砝码时微推力架输出与理想微推力架输出之间的差值;ΔLDown为返行程挂载砝码微推力架输出与理想微推力架输出之间的差值;ΔH为挂载相同砝码质量时正行程微推力架输出和反行程微推力架输出之间的差值。
表3中第二列中理想微推力架输出由砝码质量乘于拟合得到的KTM求得。
由表3中数据,最大的偏差出现在反行程挂载10g时,偏差值为10.1456mV,由线性度计算公式

可以得到微推力架200mN量程的线性度为:

式中:δL为线性度;ΔLmax为微推力架输出最大偏差;YFS为满量程微推力架输出。
5.3迟滞性
在表3中第7列,列出了挂载砝码质量不同时正行程和反行程微推力架输出之间的差值。其中最大的差值出现在挂载的砝码质量为5g、10g时,微推力架输出差值为6mV。
根据迟滞性误差计算公式

可以得到微推力架200mN量程推力测量迟滞误差 为
为

其中:δH为迟滞误差;ΔHmax为微推力架输出的最大的迟滞误差。
5.4重复性
使用表1中数据来论证微推力架200mN量程的重复性。重复性误差的计算公式为

式中:δR为重复性误差;ΔR为重复偏差。
使用3次重复测量中,每一次砝码标定时微推力架输出最大偏差作为ΔR的值,即ΔR为重复性试验中出现的最大偏差。最大偏差为20mV,出现在加载20g砝码时的第二组数据和第三组数据。
因此得到微推力架200mN量程重复性误差 为
为

6、思考题
(1)标定装置本身的重量会对标定结果产生怎样的影响?
答:由本次实验所测得的三组实验数据所得到的拟合曲线可以看出,当不加砝码时,微推力架392.15mV左右的输出,说明本次实验中并没有消除标定装置自身重量的影响。而在数据处理的过程中,标定装置的自重由于差值的原因被抵消掉了,因此标定装置的自重对标定结果的影响不大。
(2)推力架是如何实现快速稳定的?快速稳定有哪些意义?
答:通过推力架的电磁线圈提供的负反馈来实现快速稳定的。推力架快速稳定后能够减少推力架震动所产生的误差,同时能够快速得到数据。
第二篇:基本长度测量测定实验报告
基本长度的测量
实验目的
1. 掌握游标和螺旋测微装置的原理,学会游标卡尺和螺旋测微器的正确使用
2.学习记录测量数据(原始数据)、掌握数据处理及不确定度的估算和实验结果表示的方法。
实验原理
1、游标卡尺构造及读数原理
游标卡尺主要由两部分构成,如(图2–1)所示:在一毫米为单位的主尺上附加一个能够滑动的有刻度的小尺(副尺),叫游标,利用它可以把主尺估读的那位数值较为准确地读出来。
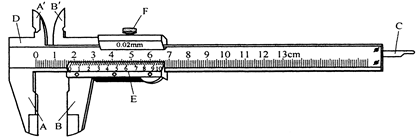
图2–1
游标卡尺在构造上的主要特点是:游标上 个分度格的总长度与主尺上(
个分度格的总长度与主尺上( )个分度格的长度相同,若主尺上最小分度为
)个分度格的长度相同,若主尺上最小分度为 ,游标上最小分度值为
,游标上最小分度值为 ,则有
,则有
 (2.1)
(2.1)
那么主尺与游标上每个分格的差值(游标的精度值或游标的最小分度值)是:
 (2.2)
(2.2)
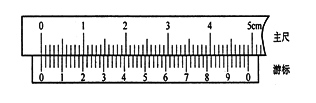
图2-7
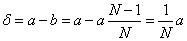
常用的游标是五十分游标(=50),即主尺上49 mm与游标上50格相当,见图2–7。五十分游标的精度值 =0.02mm.游标上刻有0、l、2、3、…、9,以便于读数。
=0.02mm.游标上刻有0、l、2、3、…、9,以便于读数。
毫米以上的读数要从游标“0”刻度线在主尺上的位置读出,毫米以下的数由游标(副尺)读出。
即:先从游标卡尺“0”刻度线在主尺的位置读出毫米的整数位,再从游标上读出毫米的小数位。
游标卡尺测量长度 的普遍表达式为
的普遍表达式为
 (2.3)
(2.3)
式中,
 是游标的“0”刻度线所在处主尺刻度的整刻度(毫米)数,
是游标的“0”刻度线所在处主尺刻度的整刻度(毫米)数,
 是游标的第
条线与主尺的某一条线重合,
是游标的第
条线与主尺的某一条线重合,
 。图2–8所示的情况,即
。图2–8所示的情况,即
 。
。
图2–8
在用游标卡尺测量之前,应先把量爪A、B合拢,检查游标的“0”刻度线是否与主尺的“0”刻度线重合。如不重合,应记下零点读数,加以修正,即待测量 。其中,
。其中, 为未作零点修正前的读数值,
为未作零点修正前的读数值, 为零点读数。可以正,也可以负。
为零点读数。可以正,也可以负。
 使用游标卡尺时,可一手拿物体,另一手持尺,如图2–9所示。要特别注意保护量爪不被磨损。使用时轻轻把物体卡住即可读数。
使用游标卡尺时,可一手拿物体,另一手持尺,如图2–9所示。要特别注意保护量爪不被磨损。使用时轻轻把物体卡住即可读数。
图2–9
2、螺旋测微器(千分尺)
常见的螺旋测微器如(图2–10)所示。它的量程是25mm,分度值是0.01mm。
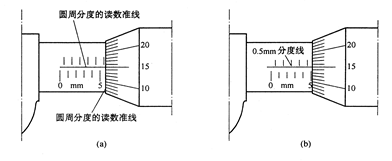
螺旋测微器结构的主要部分是一个微螺旋杆。螺距是0.5 mm。因此,当螺旋杆旋一周时,它沿轴线方向只前进0.5mm。
 螺旋柄圆周上,等分为50格,螺旋杆沿轴线方向前进0.01 mm时螺旋柄圆周上的刻度转过一个分格
螺旋柄圆周上,等分为50格,螺旋杆沿轴线方向前进0.01 mm时螺旋柄圆周上的刻度转过一个分格
这就是所谓机械放大原理。
测量物体长度时,应轻轻转动螺旋柄后端的棘轮旋柄,推动螺旋杆,把待测物体刚好夹住时读数,可以从固定标尺上读出整格数,(每格0.5mm)。0.5mm以下 图2–10
的读数则由螺旋柄圆周上的刻度读出,估读到0.001mm这一位上。如图2–11(a)和(b),其读数分别为5.650 mm、5.150mm。
 (1) 记录零点读数,并对测量数据作零点修正。
(1) 记录零点读数,并对测量数据作零点修正。
(2) 记录零点及将待测物体夹紧测量时,应轻轻转动棘轮旋柄推进螺杆,转动小棘轮时,只要听到发出喀喀的声音,即可读数。
图2–11
实验仪器
游标卡尺: 精度值:0.02mm 量程:125mm
螺旋测微器: 分度值:0.01mm 量程:25mm
被测物体: 小球;空心圆柱体。
实验内容
1.螺旋测微器测量圆球直径,不同位置测量6-8次,计算其不确定度,并写出测量结果的标准形式。
2.用游标卡尺测量空心圆柱体不同部分的外径、内径、高度,各测量6-8次。计算空心圆柱体的体积及其不确定度,并写出测量结果的标准形式。
数据处理:
1、用千分尺侧小钢球直径
根据测量原始数据,得小钢球直径测量值,数据如下表:

 的测量值为:
的测量值为:

A类不确定度为:
 B类不确定度为:
B类不确定度为:
总的不确定度

钢球直径测量结果:

2、用游标卡尺测量空心圆柱体的体积
根据测量原始数据记录,整理数据如下表:

D的A类不确定度为:

同理:
D的总的不确定度为

:

同理: 

空心圆柱体的体积 为:
为:

的不确定度
根据: 
有:  ;
;  ;
; 



空心圆柱体的体积测量结果:

注: 实验室条件:1、温度:25.0℃; 2、大气压强:759mmHg;
3、湿度:65%