简易智能电动车
设计报告
小组成员:
日 期:
摘要
本设计以STC89C52单片机为控制核心。经光敏电阻和红外对射完成循迹,寻光以及躲避障碍物,测距的检测,停车,控制时间等,经比较器LM393进入单片机。单片机通过内部程序完成对小车的控制,从而完成相关要求。
关键字:控制;检测;红外对射;智能小车;
Abstract
The design for STC89C52 core control. The photosensitive resistor and infrared to radio complete tracking, search light and avoid obstacles, ranging detection, parking, control the time, by the comparator LM393 into the single chip microcomputer. SCM through internal procedures performed on the control car, thereby completing the relevant requirements.
Keywords: control; testing; infrared; smart car;
目录
1 方案设定.............................................................................................................................................................. 1
2 各模块的选择方案........................................................................................................................................... 1
2.1 电源模块选择方案................................................................................................................................... 1
2.2 系统控制模块方案................................................................................................................................... 2
2.3 红外对射模块方案................................................................................................................................... 2
2.4恒流源模块.................................................................................................................................................. 2
2.5 比较器转换模块........................................................................................................................................ 2
3 系统硬件设计.................................................................................................................................................... 3
3.1 电源电路设计............................................................................................................................................. 3
3.2 恒流源电路设计........................................................................................................................................ 4
3.3电机驱动模块.............................................................................................................................................. 5
3.4 循迹检测设计............................................................................................................................................. 5
3.5测距检测设计.............................................................................................................................................. 6
3.6避障检测设计.............................................................................................................................................. 7
4 系统软件设计.................................................................................................................................................... 7
5 系统调试.............................................................................................................................................................. 9
6 结论..................................................................................................................................................................... 10
7 参考文献............................................................................................................................................................ 11
1 方案设定
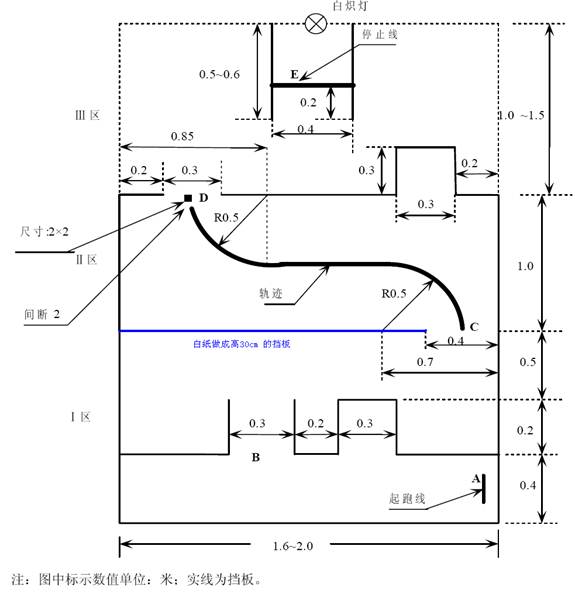
根据以上参赛图以及本次比赛的相关要求,我们小组设定了一下方案。
方案:用两片STC89C52单片机作为主控芯片,其中一片控制红外循迹,红外寻光,红外避障等模块检测,另一片检测红外测距模块。以上能使两片单片机分别工作,避免了一片单片机工作程序太大而容量不足的缺点,且能达到节能的效果。
2 各模块的选择方案
2.1 电源模块方案
在电源的选择上,我们参考了网上参加过比赛以及制作小组的资料,我们比较了网上的各种方案后,选择了以下方案:
采用了6V直流电源作为本次的主电源,用于驱动小车和相应模块。在设计上简单实用,相较于交流稳压后的电源,更加简便。
2.2 系统控制模块方案
选择STC89C52单片机进行系统的控制。该单片机具有IAP功能,支持在线下载,且内部集成了EEPROM,STC98C52,指令系统和AT89C52兼容。
2.3 红外对射模块方案
方案一:应用软件中的中断和定时器来设计软件控制,但是编写这种程序复杂且精度较低,调试很困难,占用资源也较多,断电后时钟会停止运行,供电后时间显示出现错误。
方案二:采用红外对射检测,电路简单,精度高,只要将检测到的高低电平数据读取送到单片机即可,占用资源少,供电后时间显示不会出现错误。
鉴于以上的比较分析,采用第二种方案。
2.4恒流源模块
有运算放大器LM324和大功率三极管构成的恒流电路,将电流转换成电压参数进行控制,具有控制方便,线性好的特点,使用的元件也都是很普遍的,易于实现。
2.5 比较器转换模块
采用多个LM393进行D/A转换,这种芯片输出电压可以达到基准电压的两倍,并且转换速度快,低功耗,性价比非常高,能满足独立控制的要求。
3 系统硬件设计
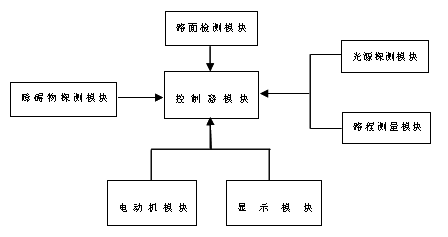
如图3.1.1所示系统主要包含电源设计、恒流源设计、D/A转换、路面检测设计,光源检测设计,显示模块设计,电动机驱动设计。
图3.1.1
3.1 电源电路设计
如图3.1.1所示,220V交流电压源经过变压器变压、桥式整流、滤波、三端稳压后,输出+12V,-12V,和+5V,-5V稳压供给系统电路。
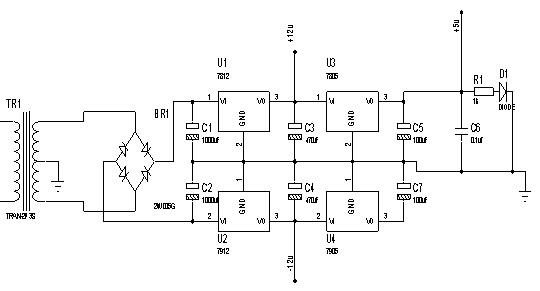 图3.1.1 电源电路
图3.1.1 电源电路
3.2 恒流源电路设计
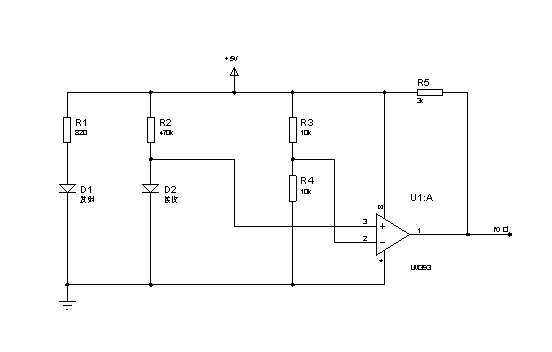
电路由三部分组成:集成运算放大器、缓冲电路和取样电路,如图3.2.1所示。此恒流源电路带负载能力非常强,且线性很好。有TLC5615D/A转换器输出的电压经过电阻 和
和 分压后在输入到集成运算放大器的3号引脚,由集成运放特性可知,
分压后在输入到集成运算放大器的3号引脚,由集成运放特性可知, ,流过电阻
,流过电阻 的电流
的电流 /,即流过LED的电流
/,即流过LED的电流 /。此恒流源电路结构简单,但性能非常优秀。
/。此恒流源电路结构简单,但性能非常优秀。
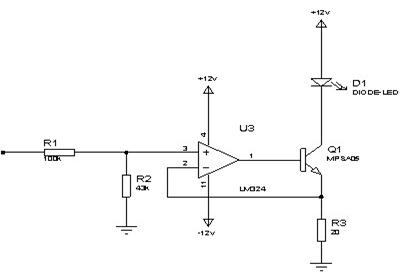
图3.2.1 恒流源电路
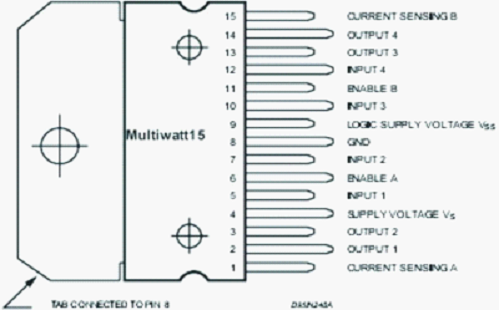
3.3电机驱动模块
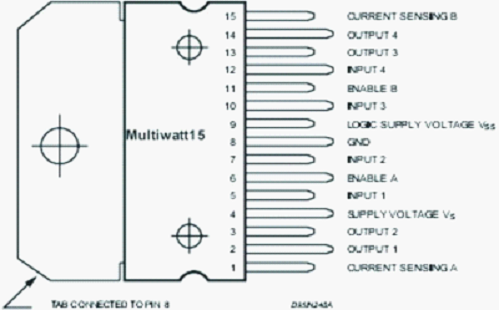
采用专用芯片L298N作为电机驱动芯片。L298N是一个具有高电压大电流的全桥驱动芯片,它相应频率高,一片L298N可以分别控制两个直流电机,而且还带有控制使能端。用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
 L298
L298
3.4 循迹检测设计
用光敏电阻组成光敏探测器。光敏电阻的阻值可以跟随周围环境光线的变化而变化。当光线照射到白线上面时,光线发射强烈,光线照射到黑线上面时,光线发射较弱。因此光敏电阻在白线和黑线上方时,阻值会发生明显的变化。将阻值的变化值经过比较器就可以输出高低电平。
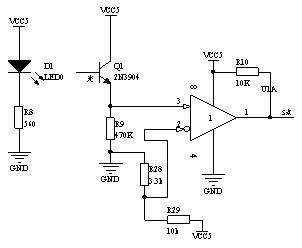
图3.4.1红外反射光电传感器循迹检测电路
3.5测距检测设计
采用红外透射光电传感器进行路况的检测,在小车车轴上安装一码盘,小车行驶过程中,码盘不断阻挡红外透射光电传感器,从而产生高低电平并传送到单片机上,经过软件控制达到对路程的检测。
3.6避障检测设计
如图3.6.1所示,小车下端引出红外对射管通过电压比较器引回单片机,通过高低电平来检测小车是否该换方向。

图3.6.1 避障检测电路
4 系统软件设计
系统软件设计框图如4.1.1所示:系统进入初始化后进入主程序并分为以下几种模式:循迹,寻光以及躲避障碍物,测距模式。
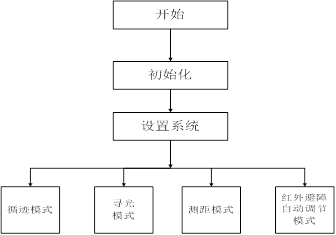
图4.1.1系统软件框图
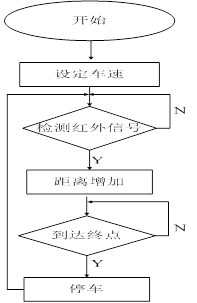
图4.1.2 测距模式
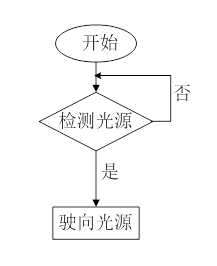
图4.1.3 寻光模式
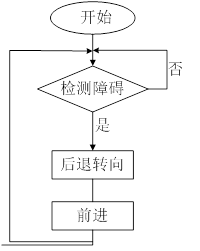
图4.1.4 避障模式
5 系统调试
由于还未进入制作阶段,我们小组只是先参考了历届关于类似项目的小车制作的知识而制定了这个初步的制作方案。在接下来的制作环节中,我们会一项项去解决遇到的困难以及所要面临的知识和技能上的欠缺,真正的调试阶段将会在初步制作完成后进行。包括小车的电路、程序等等,都将会进一步去完善。
6 结论
本次的设计是以STC89C52单片机为控制核心,含有多功能数字时钟控制、环境寻光检测、交通循迹检测、路程测距检测、红外避障报警系统等主要功能。其中的包括路程测量,避免碰壁是在尝试完成。由于本次是我们小组第一次参加这样的比赛,在经验与知识技能上会有所欠缺,我们参考了历届关于类似比赛项目的小车设计,希望能完成本次的比赛,并给自己的大学生活留下一笔宝贵的财富。也相信我们小组在各方面的设计上可以达到比赛的要求!
7 参考文献
[1]郭天祥.51单片机C语言教程.北京:电子工业出版社,2011.
[2]黄智伟.全国大学生电子设计大赛训练教程.北京:电子工业出版社,2010.
[3]童诗白,华成英.模拟电子技术基础.北京:高等教育出版社,2010.
[4]阎石.数字电子技术基础.北京:高等教育出版社,2010.
[5]百度百科、道客巴巴等网站的相关知识.
第二篇:电子设计大赛智能小车设计报告
简易智能电动车
学 校:辽宁工程技术大学
小组成员:
日 期:20##年8月4日
摘要
本设计以STC89C52单片机为控制核心。经光敏电阻和红外对射完成循迹,寻光以及躲避障碍物,测距的检测,经比较器LM393进入单片机。单片机通过内部程序完成对小车的控制。
关键字:控制;检测;红外对射;智能小车;
The abstract
This design to STC89C52 microcontroller as control core. The photoconductive resistance and infrared DuiShe complete follow mark, light and evades obstacles for the detection of comparison, the LM393 into the microcontroller. The internal process of single chip through complete control of the car.
Key word: control; Detection; Infrared DuiShe; Intelligent car;
目录
1 方案论证与比较................................................................................................................................................ 1
2 各模块的选择方案........................................................................................................................................... 1
2.1 电源模块选择方案...................................................................................................................................... 1
2.2 系统控制模块方案...................................................................................................................................... 2
2.3 红外对射模块方案...................................................................................................................................... 2
2.4恒流源模块.................................................................................................................................................... 2
2.5 比较器转换模块........................................................................................................................................... 2
3 系统硬件设计.................................................................................................................................................... 3
3.1 电源电路设计............................................................................................................................................... 3
3.2 恒流源电路设计........................................................................................................................................... 4
3.3电机驱动模块................................................................................................................................................ 5
3.4 循迹检测设计............................................................................................................................................... 5
3.5测距检测设计................................................................................................................................................ 6
3.6避障检测设计................................................................................................................................................ 7
4 系统软件设计.................................................................................................................................................... 7
5 系统调试.............................................................................................................................................................. 9
6 结论..................................................................................................................................................................... 10
7 参考文献............................................................................................................................................................ 11
1 方案论证与比较
方案一:用一片STC89C52单片机作为核心,控制整个小车,并在红外循迹,红外寻光,红外避障等模块。
方案二:用两片STC89C52单片机作为主控芯片,其中一片控制红外循迹,红外寻光,红外避障等模块检测,另一片检测红外测距模块。在符合开关灯时间、明暗程度和交通状况时,灯打开,并且第一片单片机能单独控制每盏灯。
以上两种都能完成题目要求,但是第二种方案能使两片单片机分别工作,避免了一片单片机工作程序太大而容量不足的缺点,且能达到节能的效果,故选择第二种方案。
2 各模块的选择方案
2.1 电源模块选择方案
方案一:采用电池作为电源直接输入直流后,用多个稳压器稳压得到理想的不同幅值直流电源。这种方法获取电源方便,且电源输出电流能力大。缺点是:直流电流放电受到自身影响大,放电时间受限不能长时间工作,而且价格昂贵,不符合节能的实际电路特征要求。
方案二:采用变压器将220V电压变压后,经整流桥整流滤波,再经三端稳压器稳压后等到直流电源。这种电路实现简单灵活,且能输出多种直流电源,满足了电路的要求。
鉴于以上分析,本设计采用第二种方案。
2.2 系统控制模块方案
选择STC89C52单片机进行系统的控制。该单片机具有IAP功能,支持在线下载,且内部集成了EEPROM,STC98C52是我们比较熟悉的一种常用的单片机,指令系统和AT89C52兼容,价格便宜,较容易购买。
2.3 红外对射模块方案
方案一:应用软件中的中断和定时器来设计软件控制,但是编写这种程序复杂且精度较低,调试很困难,占用资源也较多,断电后时钟会停止运行,供电后时间显示出现错误。
方案二:采用红外对射检测,电路简单,精度高,只要将检测到的高低电平数据读取送到单片机即可,占用资源少,供电后时间显示不会出现错误。
鉴于以上的比较分析,采用第二种方案。
2.4恒流源模块
有运算放大器LM324和大功率三极管构成的恒流电路,将将电流转换成电压参数进行控制,具有控制方便,线性好的特点,使用的元件也都是很普遍的,易于实现,经实验,效果非常好,是本系统的一大特点。
2.5 比较器转换模块
采用多个LM393进行D/A转换,这种芯片输出电压可以达到基准电压的两倍,并且转换速度快,低功耗,性价比非常高,能满足独立控制的要求。
3 系统硬件设计
如图3.1.1所示系统主要包含电源设计、恒流源设计、D/A转换、路面检测设计,光源检测设计,显示模块设计,电动机驱动设计和金属检测设计。
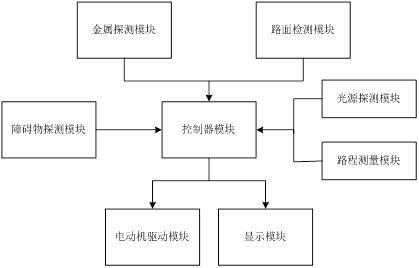
图3.1.1 系统结构
3.1 电源电路设计
如图3.1.2所示,220V交流电压源经过变压器变压、桥式整流、滤波、三端稳压后,输出+12V,-12V,和+5V,-5V稳压供给系统电路。
 图3.1.2 电源电路
图3.1.2 电源电路
3.2 恒流源电路设计
电路由三部分组成:集成运算放大器、缓冲电路和取样电路,如图3.2.1所示。此恒流源电路带负载能力非常强,且线性很好了。有TLC5615D/A转换器输出的电压经过电阻 和
和 分压后在输入到集成运算放大器的3号引脚,由集成运放特性可知,
分压后在输入到集成运算放大器的3号引脚,由集成运放特性可知, ,流过电阻
,流过电阻 的电流
的电流 /,即流过LED的电流
/,即流过LED的电流 /。此恒流源电路结构简单,但性能非常优秀。
/。此恒流源电路结构简单,但性能非常优秀。

图3.2.1 恒流源电路
3.3电机驱动模块
采用专用芯片L298N作为电机驱动芯片。L298N是一个具有高电压大电流的全桥驱动芯片,它相应频率高,一片L298N可以分别控制两个直流电机,而且还带有控制使能端。用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
 L298
L298
3.4 循迹检测设计
用光敏电阻组成光敏探测器。光敏电阻的阻值可以跟随周围环境光线的变化而变化。当光线照射到白线上面时,光线发射强烈,光线照射到黑线上面时,光线发射较弱。因此光敏电阻在白线和黑线上方时,阻值会发生明显的变化。将阻值的变化值经过比较器就可以输出高低电平。
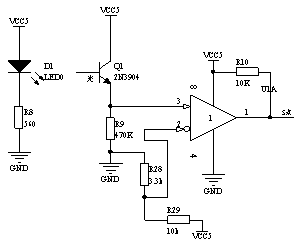
图3.6.1红外反射光电传感器循迹检测电路
3.5测距检测设计
采用红外透射光电传感器进行交通状况的检测,在小车车轴上安装一码盘,小车行驶过程中,码盘不断阻挡红外透射光电传感器,从而产生高低电平并传送到单片机上,经过软件控制达到对路程的检测。
3.6避障检测设计
如图3.7.1所示,小车下端引出红外对射管通过电压比较器引回单片机,通过高低电平来检测灯是否出跑道。
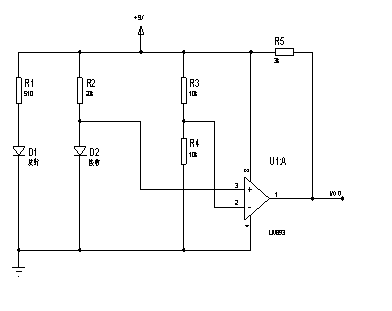
图3.7.1 避障检测电路
4 系统软件设计
系统软件设计框图如4.1.1所示:系统进入初始化后进入主程序并分为以下几种模式:循迹,寻光以及躲避障碍物,测距模式。
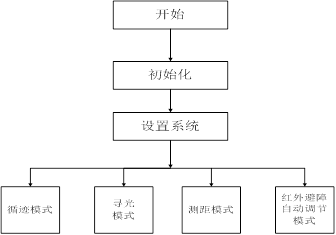
图4.1.1系统软件框图
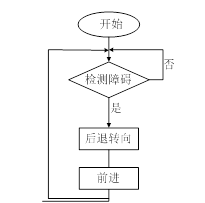
图4.1.2 循迹模式
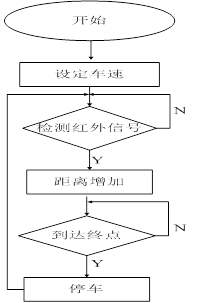
图4.1.3 测距模式

图4.1.4 寻光模式

图4.1.5 避障模式
5 系统调试
整体焊接完毕以后,先对硬件进行检查,连接有无错误,再逐步对各个模块进行调试。首先对主控单元进行调试,载入按键程序、时钟和液晶模块程序。按键加不能正常运行,查看连接电路,发现有一条连线没有焊接。接着液晶显示出现问题,每次关掉电源,液晶上的时间秒、分和月总是变化,没有按照预想会掉电后仍正常运行,进过多次测试,仍不正常。在其他单片机上测试此程序正常,于是进行了硬件的检查,最后确定为硬件问题。经过查找是杜邦线接触问题,用焊锡焊接杜邦线后重新测试,显示正常,调节也正常。
其次对路灯开关进行调节,电源打开灯亮,但是电源关掉以后灯不灭,经过多次电压测量发现控制灯的电源不在芯片主电源上,改过线路之后,灯亮正常。
然后对红外对射进行测试,挡住光时,灯没有亮,查找原因是电压没有进入单片机。于是对红外对射管进行测试,黑管上的电压不正常,经过换管和焊接和多次调试,显示正常。
对故障检测进行测试,反馈低电平不能正常接收。通过添加电压比较器,显示正常。
最后进行整体调试
6 结论
本设计以STC89C52单片机为控制核心,含有多功能数字时钟控制、环境寻光检测、交通循迹检测、路程测距检测、红外避障报警系统等主要功能。本系统用两片STC89C52单片机进行通信,通过无线传输信息控制可移动声源运动,本系统的特点是设置误差校正,有效的提高了系统的精度和稳定性。通过测试,系统性能稳定,优良,功耗低,性价比高,基本达到了设计制作的要求,在周围噪音较大时,系统偶尔会产生错误的判断。
7 参考文献
[1]郭天祥.51单片机C语言教程.北京:电子工业出版社,2011.
[2]黄智伟.全国大学生电子设计大赛训练教程.北京:电子工业出版社,2010.
[3]童诗白,华成英.模拟电子技术基础.北京:高等教育出版社,2010.
[4]阎石.数字电子技术基础.北京:高等教育出版社,2010.