机器人实验报告册
制作人:叶翔 徐培嘉 陈琳
制作日期:20##年12月
目录
1、中国机器人大赛双足竞步机器人比赛规则简述............3
2、双足竞步机器人构成简介.......................3
3、功能及其改进方案简介.........................4
4、设计与制作软件简介...........................4
5、比赛功能简介.................................5
6、制作心得体会.................................6
一、中国机器人大赛双足竞步机器人比赛规则简述
1、交叉足印竞步机器人:
结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 100mm(宽)X 300mm(高),重量不超过1Kg。机器人头部要能放入(长)200mm X (宽)100mm长方格内。
2、狭窄足印竞步机器人:
结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 100mm(宽)X 300mm(高),重量不超过1Kg.,狭窄足印竞步机器人, 单足最大尺寸要能放入(长)150mm X (宽)60mm长方格内。机器人头部要能放入(长)200mm X (宽)100mm长方格内。
3、交叉足印竞步机器人:
大学组:机器人通过步行的方式从起点线走到终点线(相距200cm,限宽60cm)。竞赛开始时先走出3步距离、立正、然后卧下、向前翻跟斗3次,再起立、向前走出3步距离、立正、然后卧下(身体向后)、再向后翻跟斗3次、再起立、然后以轻快步履走向终点,参赛机器人要在4分钟以内完成所有动作。
中学组:机器人通过步行的方式从起点线走到终点线(相距200cm,限宽70cm)。竞赛开始时先走出3步距离、立正、然后卧下、向前翻跟斗3次,再起立、向前走出3步距离、立正、然后卧下(身体向后)、再向后翻跟斗2次、再起立、然后以轻快步履走向终点,参赛机器人要在7分钟以内完成所有动作。
4、狭窄足印竞步机器人:
大学组:机器人通过步行的方式从起点线走到终点线(相距200cm,限宽60cm)。竞赛开始时,机器人先向前走出3步距离、立正、然后卧下(身体向前)、向前翻跟斗3次,再起立、向前走出3步距离、立正、然后卧下(身体向后)、再向后翻跟斗2次、再起立、然后以轻快步履走向终点、参赛机器人要在5分钟以内完成所有动作。
中学组:机器人通过步行的方式从起点线走到终点线(相距200cm,限宽70cm)。竞赛开始时,机器人先向前走出3步距离、立正、然后卧下(身体向前)、向前翻跟斗3次,再起立、向前走出3步距离、立正、然后卧下(身体向后)、再向后翻跟斗2次、再起立、然后以轻快步履走向终点、参赛机器人要在7分钟以内完成所有动作。
二、双足机器人构成
1、电源
为了避免舵机的供电电源产生的电压波动对控制电路的干扰,控制电路与舵机的电源要进行隔离,即分开供电。控制电路电源使用的是一个9V输出的AC-DC变压电源经7805芯片后提供的5V电源,而舵机的电源提供了一个接口,外接一个6V的直流电源。
2、控制芯片
控制芯片模块包括单片机、时钟电路、复位电路、外部程序存储芯片扩展以及大规模CPLD芯片。单片机采用Atmel公司的AT89S52,它是8位的高性能嵌入式控制器,其内部集成了8k的可在线编程的Flash存储器;256字节的RAM,可寻址64字节,具有32根I/O口、3个可编程定时器、8个中断源、6个中断矢量、1个看门狗定时器。时钟电路给系统提供时间基准,设计时采用11.05296MHz晶振。同时,本设计还扩展了一片8k×8位的外部存储芯片2864。CPLD芯片采用的是ALTERA公司的EPM7128。
3、串行通信
串行通信模块主要用于AT89S52单片机与PC机之间的串行通信。由于PC机的COM口符合RS-232标准,AT89S52单片机上的串行接口是CMOS电平,在RS-232与CMOS电平通信时,需要电平转换,因此,设计时利用MAX232芯片来作电平转换。
4、舵机的驱动控制
12路舵机的控制信号来自CPLD芯片的I/O口(引脚30、31、33、34、35、36、37、39、40、41、44、45)。为了防止干扰,13路舵机控制信号和驱动电路应经过TLP-521光电隔离,通过隔离出来的控制信号,还必须接入LM324比较器,以消除毛刺,增加信号的稳定性,提高信号的输出电流,以便舵机能够正确工作不至于产生不必要的抖动。图8所示为控制系统的硬件电路板线路设计图。
三.功能及改进方案
我们设计了机器人的机构,其主要特点有以下几点:布置对称性步行运动中普遍存在结构对称性。发现机身运动的对称性和腿机构的对称性之间存在相互关系。对称性的机身运动要求腿部机构也是对称的,机身对称性运动未必需要腿部机构的对称性,除非有额外的约束条件。根据这点,我们在结构设计时也采用对称性布置。框架的设计有效的利用了403p舵机的尺寸大小,并使电机的活动范围能尽量符合各关节的活动范围。采用多关节型结构。行走机构能实现平地前后行、平地侧行、转弯、上下台阶、爬斜坡等功能。整个结构采用1mm的铝合金(LY12)钣金材料,这种材料重量轻、硬度高、强度虽不如钢,但却大大高于普通铝合金。且这种材料具有弹性模量、密度比高的特点。由于机器人的各关节是用403p舵机,为了减小机器人的体积、减轻重量,机器人的结构做成是框架型的。框架的设计有效的利用了403p舵机的尺寸大小,并使电机的活动范围能尽量符合各关节的活动范围。
四.设计软件:
1、UG NX 8.0
我们设计的机器人通过UG软件设计而成,形象生动的表现了机器人的结构和功能.UG(Unigraphics)是西门子UGS PLM软件开发的CAD/CAM/CAE一体化集成软件,汇集了美国航空航天和汽车工业的专业经验。目前,UG在航空航天、汽车、通用机械、工业设备、医疗器械及其他高科技应用领域的机械设计和模具加工自动化市场上已经得到了广泛的应用。UG NX 8.0是目前UG公司推出的最新版本,较以前的版本,在性能方面有了一定的改善,克服了以前版本中一些不尽人意的地方。此外,UG NX 8.0和之前的版本相比,新增HD3D、齿轮设计模块和同步建模技术增强功能,创新、开放性的快速、精确可视化分析解决方案,进一步巩固NX以突破性同步建模技术建立的领先地位。UG NX 8.0融入了各行业需用的各个模块,涵盖了产品设计、工程和制造、结构分析、运动仿真等,为产品从研发到生产的整个过程提供了一个数字化平台.
2、Auto CAD
AutoCAD是由美国Autodesk欧特克公司于二十世纪八十年代初为微机上应用CAD技术而开发的绘图程序软件包,经过不断的完美,现已经成为国际上广为流行的绘图工具。
AutoCAD具有良好的用户界面,通过交互菜单或命令行方式便可以进行各种操作。它的多文档设计环境,让非计算机专业人员也能很快地学会使用。在不断实践的过程中更好地掌握它的各种应用和开发技巧,从而不断提高工作效率。
AutoCAD具有广泛的适应性,它可以在各种操作系统支持的微型计算机和工作站上运行,并支持分辨率由320×200到2048×1024的各种图形显示设备40多种,以及数字仪和鼠标器30多种,绘图仪和打印机数十种,这就为AutoCAD的普及创造了条件。
AutoCAD软件具有如下特点:
(1)具有完善的图形绘制功能。
(2)有强大的图形编辑功能。
(3)可以采用多种方式进行二次开发或用户定制。
(4)可以进行多种图形格式的转换,具有较强的数据交换能力。
(5)支持多种硬件设备。
(6)支持多种操作平台
(7)具有通用性、易用性,适用于各类用户此外,从AutoCAD2000开始,该系统又增添了许多强大的功能,如AutoCAD设计中心(ADC)、多文档设计环境(MDE)、Internet驱动、新的对象捕捉功能、增强的标注功能以及局部打开和局部加载的功能,从而使AutoCAD系统更加完善。
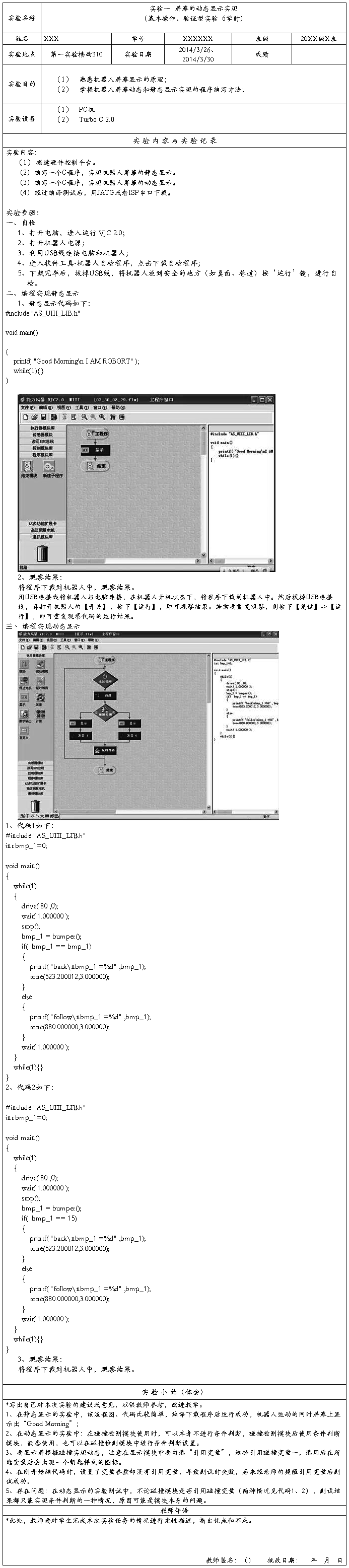
五、可实现比赛功能:
机器人通过步行的方式从起点线走到终点线(相距200cm,限宽60cm)。竞赛开始时先走出3步距离、立正、然后卧下、向前翻跟斗3次,再起立、向前走出3步距离、立正、然后卧下(身体向后)、再向后翻跟斗3次、再起立、然后以轻快步履走向终点,我们机器人可在4分钟以内完成所有动作。实际制作如下图。
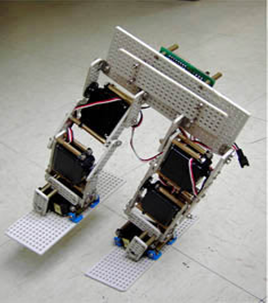

图1 图2
六、制作心得体会及感想
通过本次的实际对于双足竞步机器人的实际仿真制作,我们学习了解到了更多关于机器人的知识,一个机器人的诞生是需要很多的知识与技能,不仅仅从理论,更要注重实践环节当中的问题,我们需要考虑但每一个细节,从外观的设计,到芯片的选择,以及外形的改进,到最后的实际调试,这是一个完整的过程,每一步的不完整以及失误都会导致机器人的不能正常运行,今后如果我们要开发一款机器人产品的话一定要细中有细,不断的去改进,查阅相关知识,不断的去创新与实践。才能真正做出一款产品。
第二篇:机器人实验一
《简易机器人》实验报告