
专业班级:20##级工业设计
姓 名 :岳宝海
学 号 :20124027128
任课教师:岳宝海
实验一 人体静态尺寸测量
1、实验目的
(1)、学习人体测量仪器的用法,测量人体的静态尺寸;
(2)、学习人体尺寸在产品设计中的应用。
2、实验内容
(1) 测量人体静态尺寸;
(2) 根据统计学原理求各测量尺寸的均值、方差 ,并得到第5、95百分位的大小;
3、实验仪器及器材
人体测高仪、人体测量用直角规、人体测量用弯脚规

4、实验步骤
(1)学习使用各测量仪器;
(2)将测量的各项静态尺寸填入下表;
(3)计算均值、方差、标准差,并算出5、50、95百分位数的人体测量数据。
每位同学分别测出自己的身高、坐高等列入表格。8-10个同学一组计算出均值、方差、标准差。
5、实验结果分析
表1 测量人体主要尺寸(mm)

结论:1、求百分位的公式x=身高的均值+(-)(Sd*K)
2、1%--50%直接的数据时,式子中用“-”,当50%--99%之间的数据时,式中取“+”。
3、第50百分位是各个数值的均值。
4、第95百分位的K值是1.645
5、经过对比数值发现各组数据较书上对应的数据相比较小,数据的准确性跟被测的样本数目有关。
实验二、视觉错觉测试实验
1、实验目的:
测试人的正常视觉是否存在误差。
 2、实验原理
2、实验原理
错觉是在特定条件下,对客观事物所产生的带有某种倾向的歪曲知觉,而且是必然产生的。错觉在人的心理活动中几乎是难免的,不随人的意志而改变。当产生错觉的条件存在时,每个人都会出现错觉,只是错觉量的大小存在个体差异。所以它并不是心理的一种缺陷。
错觉的种类很多,但最常见、应用最广的是几何图形视错觉。本仪器主要是证实最典型的缪勒—莱伊尔(Muller - Lyer)视错觉现象的存在和研究错觉量大小。缪勒—莱伊尔错觉是指两条等长的线段,由于一条两端画着箭头,另一条两端画着箭尾,看起来前者比后者短。这是由于人的知觉整体性引起的错觉。
3、实验方法
仪器直立于桌面,被试位于一米远,平视仪器的测试面。主试移动仪器上方的拨杆,即调整线段中间箭羽线的活动板,使被试感觉到中间箭羽线左右两端的线段长度相等为止。可以验证箭头线与箭尾线的长度错觉现象,并读出错觉量值。
另一种箭羽线夹角的线段,重新测试其错觉量值,并比较不同条件即不同箭羽线夹角对错觉量的影响。
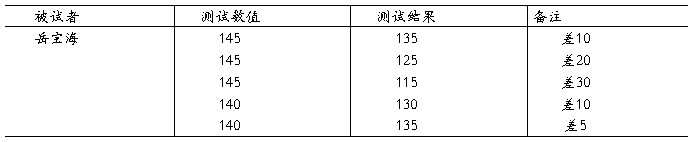
4、实验结果

5、结果分析
当被试位于一米时,被试者调整两端长度相同时,实际箭头线的长度大于箭尾线的长度,观察其他同学的数据发现总体的趋势是实际测量的箭头线长度大于箭尾线长度,但是,但是仍然还有部分同学正好相反。
随着距离的增加,整体趋势保持不变,但是误差值,随着距离的增大而增大,部分出现了结果相反的现象。由此得出距离越大误差越大。
实验三、光亮度辨别实验
 1、实验目的
1、实验目的
测试被测人对光亮的识别是否正常。
2、实验方法
(1)、把仪器的光刺激部分放在被试的对面。
(2)、接通电源
(3)、把两个光刺激中的一个作为标准刺激,另一个作为变异刺激。
(4)、对标准刺激选定一个亮度,实验开始时把变异刺激的亮度调得比标准刺激较暗或较亮。
(5)、如用平均差误法测定差别阈限,则由被试或主试连续调节变异刺激,置到被试看起来变异刺激与标准刺激的明度相等为止。也可以由主试按一定的梯级逐一调节变异刺激,通过渐增或健减的程序,用最小变化法测定明度差别阈限。
(6)、如制作明度量表,以分段法制作明度的比例量表。
(7)、在任何实验中,标准刺激和变异刺激都要一定的顺序互换位置。
3、实验结果
结论:当被测试数值较小时,测试的结果的误差较大,当被测试数值较大时,测试的结果的误差较小,由此得出当数值较大时,人眼感应的变化范围降低。
同时与光源的亮度和颜色有关,被测的光是偏黄色的淡黄色,因为黄色是亮色,对人眼的刺激较大,降低了识别的范围,因此所得出的数据的误差较小,测试的结果较准确。
实验四、速度感知实验
1、实验目的:
 测试人对速度感觉的差异。
测试人对速度感觉的差异。
2、实验原理:
速度知觉反映了每个人对速度感觉的差异。速度知觉也是各项劳动实践中和各项体育运动中不可缺少的技术指标。驾驶员超车要估计前面车子的速度,要估计对面来车的速度,要估计前面横越车子、行人的速度,足球运动员在赛场上要对足球滚动的速度,与其他运动员跑动速度作出敏捷正确的判断,所以能准确掌握速度判辨能力是很有用的。
本仪器为心理学测试仪器,用于测试人的速度预知反应,适合于运动员、驾驶员等对速度预知反应的实验。
3、实验方法:
(1)、接通电源(AC220V),被试反应手键插头插入被试面右下角的插座中。启动电源开关,主试仪器面板计时显示:00.00。
(2)、被试坐在距仪器被试面1m左右,平视屏幕板,优势手手指放在反应键上,准备好。
(3)、速度设定:按主试面板的“选择速度”键,其上方数码管相应显示移动速度的编号。
(4)、“挡板”设定:拉动仪器两侧面的拉伸杆,任意确定被试屏幕上左右两个光点的位置,组成一个虚拟的“挡板”。
(5)、主试按下“开始”键,刺激灯按设定速度自左向右移动,当刺激灯到达第一个设定光点(起点)时,灯被熄灭,被试应假设灯以原速度仍在移动,进而设想,当灯光正好到第二个设定光点(终点)位置时,用右手按下反应键,此时刺激灯会亮,显示其位置,从而判别被试对于速度的判别能力。
(6)、主试按“计时显示”键,可分别显示标准设定、被试反应、差异时间,相应指示灯亮。差异值:显示正值,说明被试提前反应,判别速度过快;若出现负值,则说明被试滞后反应,判别速度过慢。
(7)、通常一个被试的测试可以由不同的位置距离、不同的移动速度条件下,反复进行5-10次实验,最后求出差异的平均值。
(8)、一次实验完成后,刺激灯会自动重新回到左侧的起始位置。
(9)、每次测试后,要重新开始新的测试,必须按“复位”键。
5、实验结果:

6、结论
当移动的速度较慢时,视觉停留的时间变长,人的心理保持放松状态,而距离不变,导致人的感知滞后,当按下键时移动的点较对比的点滞后,表现为预测速度表现为过慢;
当移动的速度较快时,视觉停留的时间变短,人的心理保持紧张状态,而距离不变,导致人的感知提前,当按下键时移动的点较对比的点提前,表现为预测速度表现为过快。
实验六、大小知觉恒常性测定
1、原理
人能在一定范围内不随知觉条件的改变而保持客观事物相对稳定特性的组织加工过程叫做知觉恒常性。大小知觉恒常性是指人对物体的知觉大小不完全随映像的变化而趋于保持物体实际大小的特性。
同一物体,距观察者越近,其投射到视网膜上的视像越大;反之,其视像越小。即,如果按照物理学中的光学原理,物体与观察者之间的距离对视像的大小有很大的影响。但是,在实际知觉中,人仍然能比较正确的反映不同距离物体的实际大小。也就是说视网膜上投影的大小有变化时,人的知觉保持相对恒常而不跟着发生变化。
2、目的
本实验的目的在于:(1)用比配法验证视觉大小常性现象;(2)学习大小恒常性的方法;(3)讨论距离对大小恒常性的影响;(4)讨论标准刺激大小对大小恒常性的影响。
3、方法
3.1 仪器
EP510大小常性测定仪
3.2 程序
3.3.1 步骤1
(1)选择长度为7m以上的场地。以每1m为一个度量级,测定距离位置,实验时,标准刺激距被试依次为20、10、7m、6m、5m、4m、3m。
(2)被试根据标准刺激的大小,调节手边大小常性测定器至大小相等。注意,被试应有时从大到小调,有时从小到大调,采用ABBA序列,且被试与测量器的观视距离为25cm。指导语如下:“请你注意正前方屏幕上三角形的大小,并照此大小调节你手边的测量器,直到你主管感知到一样大为止。报告记录员记下你调节后图形的数值。注意测量器的观视距离应保持25cm。”
(3)记录员将读出的数据记入下表。在实验中,记录员不得将测量数据告诉被试。实验记录用纸形式如下:
表1大小恒常性实验记录表(单位:mm)

3.2 步骤2
(1)选择固定测量距离;
(2)改变标准刺激;
(3)实验步骤与程序1相同。
表2大小恒常性实验记录表(单位:mm)

4 结果
4.1 计算各种情况下大小恒常性系数与透视值:
布伦斯维克提出的计算公式如下:
常性系数=(R-S)/(A-S)
R:见到的形状值
A:实际形状值
S:透视形状值
透视值S=250×实际值/观测距离 (mm)
表1在固定刺激下的透视值

表2被试在固定刺激下常性系数记录表

表3固定视距的透视值

表4被试在固定视距6m时的常性系数记录表

4.2 制作在不同观察条件下大小知觉曲线图。横坐标为视距或标准刺激,纵坐标为大小恒常性系数。
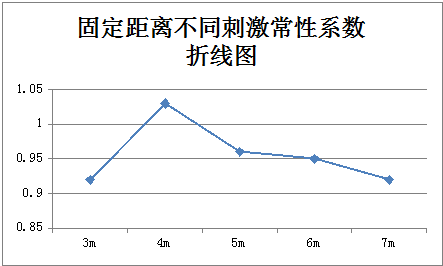

5分析:大小常性的规律:刺激不变时,大小常性系数整体随着视距的增大而减小;视距不变时常性系数大致随着刺激的高度的增大而有小幅度增加,但是总体变化不大,在固定刺激为12cm,固定视距为10mm时,不同被试大小知觉常性系数都趋于1
视距固定时,某些被试的大小常性系数随刺激的高度的增加改变的不明显,导致这种结果的影响因素有以下几种:1.被试情绪受外界因素影响 2.距离因素 3.被试在试验中可能产生视觉疲劳 4.被试视力不同 5.被试是否配戴眼镜
试验中透视值固定,随着标准刺激距被试越来越远,大小恒常性系数有减小的趋势,但并无完全的反比关系,在视距不变时,随着标准刺激的增大,大小恒量系数有增大的趋势,但也没有弯曲的正比关系。
个人分析:由于测试佩戴眼镜,以及邻近中午饭时间,所以测试的结果又些偏差,但总体看来,偏差还是不是很大。
6结论
1.根据实验数据结果可以表明视觉的大小恒常性存在;
2.当标准刺激固定,观测距离改变时,大小常性随着距离的增大而减弱;
3.当距离不变时,标准刺激大小发生变化是,大小常恒性随着标准刺激的增大而加强;
4.人对物体的知觉大小不完全随印象的变化,而是趋于保持物体实际大小的特征。
第二篇:实验12 机构组合创新操作训练实验指导书及实验报告
实验12 机构组合创新操作训练实验
12.1 机构组合创新操作训练实验指导书
一、实验目的
1. 通过对各种机构的操作与分析训练,提高学生的工程实践能力和动手能力;
2. 加深学生对机构组成原理的认识,结合机构组合方法认识机构的组成情况;
3. 加强对机构的认识和运用机构的能力,培养学生的创新意识和创新设计能力。
二、实验设备
1. 常见的一些机构模型介绍如下:
机构模型的种类较多,图12-1为50多种金属制机构模型,系哈尔滨军事工程学院19xx年设计,其运动构件用优质碳素钢制作,机架用铸铁制作,底板用木材制作。图12-2为20种机壳底板用PVC工程塑料制作的机构模型,其转动件用铝合金及钢材制作。
图12-1 50多种金属制机构模型
图12-2 20种工程塑料制机壳机构模型
2. 本实验中,在陈列柜里可供参观的组合机构主要有:串联机构、并联机构和复合机构等,其名称如下:
(1)凸轮-蜗轮蜗杆机构;(2)联动凸轮组合机构1;联动凸轮组合机构2;(3)扇形齿轮;
(4)凸轮连杆组合机构;(5)叠加机构;(6)凸轮齿轮组合机构;(7)齿轮连杆组合机构; 关于上述机构的基本介绍在陈列柜中都有,请同学们在参观时结合所学机构组合方法详细观看。
3. 本实验所用的各种基本机构及组合机构的实用模型主要有:
(1)A1曲柄滑块泵;A2 曲柄摇块泵;A3 曲柄摇杆泵;A4 转动导杆泵;A5 摆动导杆泵;A6 剪床机构;A7 差动轮系机构;A8 浮动盘联轴节;A9 齿轮直线机构;A10 齿轮摇杆机构。
(2)B1 抛光机;B2 装订机机构;B3 牛头刨床;B4 颚式破碎机;B5 步进输机;B6 假肢膝关节机构;B7 机械手腕部机构;B8 简易冲床;B9 铆钉机构;B10 制动机构。
(3)D1 叠加机构;D2 双曲机构;D3 内槽轮机构;D4 滚子推杆心型凸轮机构;D5 斜齿轮传动机构;D6 减速器;D7 齿轮间歇机构;D8 2K周转轮系机构;D10 心型磨轮机构;D11 扇形齿轮机构;D12 摩擦轮机构;D13 正弦机构;D14 直线槽轮机构;D15 行星机构;D16 等径凸轮机构;D17 450螺旋传动机构;D18 圆锥齿轮传动机构;D19 齿轮传动往复运动机构;D20 空间机构;D21 安全离合器机构;D22 齿轮连杆机构;D23 摆动滑块机构;D24 椭圆仪;D25 渐开线凸轮机构;D26 直线运动机构;D27 连杆棘轮机构;D28 差动螺旋机构;D29 滑道轴节机构;D30 三平杆传动机构;D31 万向接头;D32 双冲头机构;D33 偏心凸轮机构;D34偏心往复运动机构;D35 急回机构;D36 椭圆齿轮机构;D37 2K-H周转轮系机构;D38 三档齿轮变速机构;D39 蜗杆蜗轮传动机构;D40 往复圆柱凸轮机构;D41 槽轮机构;D42 机器人爬杆机构;D43 摇动导杆急回机构;D44 反馈机构;D45 900螺旋齿轮传动机构;D46 差速器;D47 轮轴传动机构;D48 运动合成机构;D49 偏心调速器机构;D50 行星机构Ⅱ。
以上70种机构模型涵盖了从单一到组合、从平面到空间、从简单到复杂的各类机构,可供学生进行“机构组合创新操作训练实验”使用。通过该实验,有助于学生开阔视野,提高学习机械创新设计课程的兴趣,培养机构创新设计能力,同时也有利于课外科技创新活动和第二课堂的开展。 1
三、实验原理及内容
执行系统是机械系统中的重要组成部分。为完成机械系统预期的工作,执行系统一般由一个或几个执行机构组成。执行构件是执行机构的输出构件,是执行系统中直接完成工作任务的零部件。
机构的组合是将几个基本机构按一定的原则或规律组合成一个复杂的机构或机械系统,如凸轮连杆机构由凸轮机构和连杆机构组合而成,齿轮连杆机构由齿轮机构和连杆机构组合而成。通过多种基本机构的组合可以实现某种复杂的运动规律,使之具有特殊的运动和动力特性,而完成实际生产中工作要求的典型机构的组合系统称为组合机构。
机构的组合,其实质是通过将各种基本机构以一定的形式相联接,实现运动的变换、叠加和动力性能的改善,而得到组合系统的输入——输出不同于基本机构的运动学、动力学特征的新的机构或机械系统。
因此,机构的创新设计是建立在学习、掌握基本机构的运动、动力特性的基础之上,结合现代控制技术的应用,并总结生产实践的工程经验和综合运用多方面的知识而发挥创造才能的具有挑战性的工作。
由于机构的创新及组合机构的设计没有固定成熟的程式和标准的规定,灵活性大,故实验中应注意观察串联机构、并联机构、反馈机构和叠加机构等组合机构及其运动的实现。
“机构组合创新操作训练”实验的主要内容如下:
1. 首先,对具有组合机构的陈列柜进行参观,根据所学机构的组合方法,通过参观柜内各种组合机构的模型,加深对串联机构、并联机构和复合机构等的理解,了解其基本结构组成和运动情况。
2. 其次,对常用的组合机构实用模型进行手动操作,了解其基本结构组成、运动传递情况及其在生产中的应用,并完成实验报告中提出的问题。
3. 通过对以上各种组合机构的参观、操作与分析实训,请结合你所学的创新原理与技法,找出一种在生产实践中综合运用上述方法进行创新的简单机器实例,并结合图形对其基本组成和运动情况进行说明。最后请谈一谈通过该实践环节的训练,你所获得的一些心得体会和建议。
2
12.2 机构组合创新操作训练实验报告
一、实验目的
二、实验设备
三、回答问题
1. 你所操作的组合机构中哪一种属于串联式机构组合,请说明其基本组成和运动情况,并绘制该机构的示意图,加深对串联式机构组合概念的理解。
2. 你所操作的组合机构中哪一种属于并联式机构组合,请说明其基本组成和运动情况,并绘制该机构的示意图,加深对并联式机构组合概念的理解。
3. 你所操作的组合机构中哪一种属于复合式机构组合,请说明其基本组成和运动情况,并绘制该机构的示意图,加深对复合式机构组合概念的理解。
4. 你所操作的组合机构中哪一种属于叠加式机构组合,请说明其基本组成和运动情况,并绘制该机构的示意图,加深对叠加式机构组合概念的理解。
5. 通过对以上各种组合机构的参观、操作与分析实训,请结合你所学的创新原理与技法,找出一种在生产实践中综合运用上述方法进行创新的简单机器实例,并结合图形对其基本组成和运动情况进行说明。最后谈一谈通过该实践环节的训练,你所获得的一些心得体会和建议。
3