毕业设计/论文
开 题 报 告
课 题 名 称 扭矩-压力复合检测传感器的
试验性设计
院 系 机电与自动化学院
专 业 班 机械电子工程1006班
姓 名 郑 世 昌
评 分
指 导 教 师
华中科技大学武昌分校
毕业设计开题报告撰写要求
1. 开题报告主要内容
1)课题设计的目的和意义;
2)课题设计的主要内容;
3)设计方案;
4)实施计划。
5)主要参考文献:不少于5篇,其中外文文献不少于1篇。
2.撰写开题报告时,所选课题的课题名称也不得多于25个汉字,课题设计份量要适当, 设计中必须是自己的设计内容。
3. 开题报告的字数不少于2000字(艺术类专业不少于1000字),格式按《华中科技大学武昌分校本科毕业设计/论文撰写规范》的要求撰写。
4. 指导教师和责任单位必须审查签字。
5.开题报告单独装订,本附件为封面,后续表格请从网上下载并用A4纸打印后填写。
华中科技大学武昌分校学生毕业设计开题报告

(此表由学生填写,指导教师、教研室、系签署意见)
第二篇:应变式扭矩传感器的设计研究
第10期
20xx年10月
文章编号:1001-3997(2011)10-0013-03
机械设计与制造
MachineryDesign&Manufacture
13
应变式扭矩传感器的设计研究*
殷宝麟于影龙泽明郭士清佳木斯154007)(佳木斯大学机械工程学院,
Studyondesignprincipleofstraintorquesensor
YINBao-lin,YUYing,LONGZe-ming,GUOShi-qing
(DepartmentofMechanicalEngineering,JiamusiUniversity,Jiamusi154007,China)
??????????????????????????????????????????
【摘要】扭矩传感器应用广泛,对其研究十分必要。针对典型弹性元件理论分析的基础上,提出了
?????????????????????????
?????????????????????????
5种应变式扭矩传感器的实现形式,并对其应变、变形及扭振固有频率进行了理论研究,分别建立了对应的力学模型。依据所建立的力学模型,以扭转变形最小为目标函数,进行了弹性元件几何尺寸的优化设计,并分析了不同形式的扭矩传感器性能差异。最后,设计了一种应变式扭矩传感器,并对其进行了有限元仿真,仿真结果很好地验证了所建立的力学模型。故所建立的力学模型可以较好地解决应变式扭矩传感器的设计计算问题。
关键词:扭矩传感器;弹性元件;力学模型;优化设计;有限元
【Abstract】Sincethetorquesensorisappliedwidely,itisnecessarytostudyit.Afteranalyzingthetheoryoftypicalelasticelements,theenforcingmethodfor5formsofstraintorquesensorarepresented,inwhichstrain,torsionaldeformationandnaturalfrequencyoftorsionalvibrationisanalyzedintheoryandrelativemechanicalmodelsareestablishedrespectively.Takingtheminimumvolumeoftorsiondeformationasthegoalfunction,theoptimaldesignforthegeometricdimensionoftheelasticelementisconductedaswellastheperformancedifferenceamongdifferentformsoftoquesensors.Finally,astraintorquesensorisdesigned,andtheFEAsimulationofthesensoriscompleted,whichresultrectifiesthemechanicalmodeloftorquesensor.Thusthecomputationproblemsindesigningstraintorquesensoraresolved.ment
Keywords:Torquesensor;Forcesensingelements;Mechanicalmodel;Optimaldesign;Finiteele-中图分类号:TH12,TP212
文献标识码:A
1引言
随着科学技术的发展,尤其是在机器人、汽车工业、机械加工等领域,越来越多地要求测量动态非电量或在运动过程中测量非电量,而传感器处于被测对象与测试系统的接口位置,故对其性能的要求越来越高[1-2]。应变式传感器由在弹性元件上粘贴电阻力矩、压力及加速度等参数测应变敏感元件构成,广泛应用于力、量[3-5]。传感器的基本要求主要包括:
)具有足够的灵敏度;(2)具有足够的刚度;(3)动特性要(1
好,即具有较高的自振频率;(4)结构简单,加工容易,维护简便。而弹性元件的结构形式决定了传感器的性能优劣,同时也影响传感器的加工工艺性以及贴片的难易程度,是设计传感器的关键核心问题。文献[6-7]提出了一种Maltess立体结构的力传感器,具有干刚度高的优点,但结构较为复杂,加工不便。文献[8-9]中在力扰小、
学分析的基础上,对弹性元件的几何尺寸及贴片位置进行了优化研究。
多维力传感器的结构较复杂,且各输出通道之间存相互耦
6,10]
合,严重制约其测量精度的提高和综合性能的改善[1,。而单维
力或低维力传感器的结构简单,测量精度可达0.01%。故多维力
*来稿日期:2010-12-14*基金项目:黑龙江省自然基金项目(E200930),佳木斯大学科学技术研究重点项目(Lz2009-019)
??????????????????????????????????????????
比较不同实现形式的优劣。
传感器的发展趋势之一就是由现有成熟的低维力传感器组合而成。另一方面,很多实际应用,例如关节型机器人的关节扭矩测攻丝过程中切削扭矩的检测等,常常只需要测量扭矩,故研制量、
出灵敏度高、刚度大以及动特性好的扭矩传感器十分必要。在针对应变式扭矩传感器给出5种弹性元件的实现形式,在力学分析的基础上,设计计算这5种扭矩传感器弹性元件的几何尺寸,并
2基本弹性元件的工作原理
2.1基本弹性元件的应变与变形
应变式传感器中,3种基本弹性元件形式,如图1所示。如图1(c)所示,剪切梁式可看作是由悬臂梁式或双固定端梁式的不同贴片位置转化而来的。
悬臂梁式弹性元件在力F作用下产生的应变ε与变形y可由式(1)、式(2)给出:
2
ε=6F(L-x)/*Ebh*
3
3
(1)
y=4FL/*(2)Ebh*
式中:E—材料的弹性模量;x—应变考察点,由加工工艺及应变片
的尺寸决定。
14
b
xR1
h
殷宝麟等:应变式扭矩传感器的设计研究
如图4所示。可采用2种形式实现,
y
R3
L
R4
F
R1R2
R1R2
x
yR4
R1R2
x
H
y
第10期
y
R2
b
Rx
Rx
LR3
R3L
RR4
R3L
H
x
B
b
xR1R2
L
R3
F
h
R4
(a)I型
yR1
R
(b)II型
图3轮辐式扭矩传感器示意图
yR1
x
x
L
RR3
HBR4
x
(c)III型
R4HR4R3
y
(b)双固定端梁式
(R2,R4)
45°
R1,R3
bh
R2
B
R2
L
(a)I型(b)II型
图4四柱式式扭矩传感器示意图
Q
3.2力学模型3.2.1轮辐式I型
轮辐式I型扭矩传感器中的弹性元件可视为两端固定的剪φz及fT由式(7)~式(9)给出:切梁,其ε、
3T(1+μ)2
(c)剪切梁式
图1基本弹性元件形式
双固定端梁式弹性元件在F作用下产生的ε与y可由式(3)、式(4)给出:
ε=3F(L-2x)/22Ebh
3
3
2
2
(3)
B
(a)悬臂梁式
ε=(7)(8)
(9)
y=FL/2(4)2Ebh2
剪切梁式弹性元件在剪切力Q作用下产生的ε可由式(5)给出:ε=1.5Q(1+μ)(/Ebh)式中:μ—材料的波松比。
(5)
(L+R)φz=TEHB(L/2+R)fT=
B由上述分析可知,在弹性元件上的考察点处存在ε=ε1=-ε2=-ε3=ε4。采用桥路图,如图2所示。即可将输入的力信号转化为电信号。
姨ρ—材料的密度。式中:
3.2.2轮辐式II型
轮辐式II型中的弹性元件可视为两端固定梁,其ε、φz及fT
可由式(10)~式(12)给出:
ε=
3T(L-2x)
4EHB(L+2R)
2
R1R4
(10)
Uin
R2R3
(L+R)φz=TEHB(L/2+R)fT=
H(11)(12)
Uout
姨
图2桥路图
3.2.3轮辐式III型
轮辐式III型中的弹性元件可视为悬臂梁,其ε、φz及fT可由式(13)~式(15)给出:
ε=
(L-x)3T
2EHB(L+R)TL
32EHB(L+R)
3
2.2弹性元件扭振固有频率
在Y轴方向的力F作用下,弹性元件会产生沿Y轴的变形y,并发生振动。故在扭矩T作用下,系统振型为扭振。振动固有频率fT可由式(6)给出:fT=姨Tz/2π
的转动惯量。
(6)
(13)
KT—弹性元件的弹簧系数,且KT=F/y;Iz—弹性元件对z轴式中:
φz=fT=
(14)
35种形式应变式扭矩传感器及力学分析
3.1扭矩传感器的实现形式
给出了5种应变式扭矩传感器的实现形式,其中,轮辐式扭矩传感器可采用3种形式实现,如图3所示。四柱式扭矩传感器
H(L+R)2πL(L/2+R)
姨
(15)
3.2.4四柱式I型
四柱式I型中的弹性元件可视为双固定端梁,其ε、φz及fT
可由式(16)~式(18)给出:
No.10Oct.2011
(L-2x)ε=3T2
8EHBRφz=
TL32
8EHBR
3
机械设计与制造
(16)
4
38.2
14
准50
15
(17)
6
HfT=0.4502L
姨
(18)
24
48
12
3.2.5四柱式II型
四柱式II型中的弹性元件可视为两端固定的剪切梁,其ε、φz及fT可由式(19)~式(21)给出:
(1+μ)ε=3T
φz=TL32
8EHBRBfT=0.45022L
3
图5四柱式II型扭矩传感器结构尺寸
4.2有限元仿真及结果讨论
采用ANSYS软件对图5所示的四柱式II型扭矩传感器进行了有限元分析,仿真结果,如图6所示

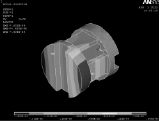
。
(19)(20)
(21)
姨4设计计算及结果讨论
4.1优化设计计算及结果讨论
以扭转变形φz最小为目标对5种形式的扭矩传感器进行优(22)给出:化设计计算。目标函数及约束条件可由式
minφ(H,L,R)zB,
T
s·tA[B,H,L,R]叟b
(a)应力云图
图6有限元仿真结果
(b)变形云图
5结论
(1)针对典型的弹性元件进行了分析,并提出了5种应变式(2)对前述5种传感器的应变、扭转刚度扭矩传感器的实现形式。
及扭振固有频率进行了理论分析,分别建立了相应的力学模型;(3)依据所建立的力学模型,以扭转变形最小为目标函数进行了弹性元件几何尺寸的优化计算,计算结果及理论分析表明,四柱式II型,即以两端固定的剪切梁为弹性元件的扭矩传感器,具有大的扭转刚度、高的扭振频率,且轴向及径向尺寸较小;(4)依据优化计算的结果,设计了一种应变式扭矩传感器,并进行了有限元仿真,仿真结果很好地验证了所建立的力学模型。
ε(B,H,L,R)=ε0
(22)
T
[B,H,L,R]叟b—由各种形式下弹性元其中的约束条件A
件的在加工工艺约束及贴片工艺要求给出;ε0—设计最大应变量。
设定最大测量扭矩T=950N·m。扭矩传感器的本体材料为40Cr,材料的力学性能参数为:E=218GPa,μ=0.3,ρ=7.82×103kg/m3,σs=800MPa。考察点处的设计应变ε0=1500με。对5种形式的扭矩传感器进行优化设计计算,计算结果以及对应此几何尺寸下
参考文献
[1]张景柱.特种六分力传感器设计原理研究[D].南京:南京理工大学出
传感器的φz及fT如表1所示。弹性元件组外廓尺寸D为最大径版社,2008.
[2]M.Vasudevan,R.Arumugam,S.Paramasivam.Realtimeimplementationof
向尺寸,Hz—最大轴向尺寸,如图3、图4所示。
viabletorqueandfluxcontrollersandtorquerippleminimizationalgorithm
表15种形式扭矩传感器优化设计结果及性能对比forinductionmotordrive[J].EnergyConversionandManagement,2006,
47(11-12):1359-1371.
几何尺寸/mm弹性元件组外廓
[3]刘迎春,叶湘滨.传感器原理—设计与应用[M](.第3版).长沙:国防类型φz/ofT/kHz工艺性
D×H/mm尺寸zBHLR1997:35-47.科技大学出版社,
[4]Y.Li,J.Zhang,Z.Jia.Researchonforce-sensingelement’sspatialarra
I11.44.024.019.186.2×4.02.51668.1356好
ngementofpiezoelectricsix-componentforce/torquesensor[J].Mechanical
轮辐式VII6.012.447.720.7135.4×6.02.29213.3047较好2009,23(8):2687-2698.SystemsandSignalProcessing,
[5]张新.应变式三维加速度传感器设计及相关理论研究[D].合肥:合肥工III6.04.024.0359.1766.2×6.01.30595.7098差
业大学出版社,2008.
I6.04.030.0227.0458.0×30.00.052610.564较好
[6]M.Uchiyama,E.Bayon.Systematicdesignproceduretominimizeaperfor四柱式
[J].TransASME,JournalofDynamicmanceindexforrobotforcesensorsII18.54.024.019.146.0×24.00.058776.345好
MeasurementandControl,1991,139:388-394.Systems,
表1中的“工艺性”是由贴片工艺性及加工工艺性综合衡量[7]E.Bayon,J.Stubbe.Six-axisforcesensorevaluationandnewtypeof
optimalframetrussdesignforroboticapplications[J].JournalofRobotic的。由式(7)及式(19)可知,轮辐I型与四柱式II传感器,对应贴
Systems.1989,6(2):191-208.
片位置要求并不严格;其他形式的传感器的贴片位置与设计考察[8]Y.Houa,D.Zenga,J.Yaoa,K.Kanga.OptimaldesignofahyperstaticStewart
platform-basedforce/torquesensorwithgeneticalgorithms[J].Mech点间的微小差别均将影响使用效果,即贴片工艺性较差。对于轮
atronics,2009,19(2):199-204.
辐III型传感器,由于需要加工出柔性铰链孔以消除弯矩干扰,如[9]L.Chao,K.Chen.Shapeoptimaldesignandforcesensitivityevaluationof
.SensorsandActuatorsA:Physical,V,1997,63six-axisforcesensors[J]图3(c)所示。则加工工艺较差。
(2):105-112.
依据计算结果,设计的四柱式II型的扭矩传感器结构尺寸,[10]尹瑞多.Stewart广义六维力传感器的研究[D].浙江:浙江大学出版社,
2006.如图5所示。
18.5