一、电机与控制
1、长动、点动控制电路
(1)电路图:


(2)工作原理:
按下按钮SB2,KM线圈得电,由它控制的KM常开触点将闭合。放开SB2按钮后,在KM2常开触点吸合的这条支路导通,形成自锁,即SB2实现了长动功能,SB1为停止按钮。当按下按钮SB3,SB3常开触点闭合,KM线圈通电,线圈得电,它的常开触点吸合,但SB3的常闭触点在按下的时候会打开,KM的常开触点即使闭合也无法形成自锁。要让线圈保持通电,只能一直按着SB3,即SB3按钮实现了点动功能。
(3)调试和结果:
在接线时由于弄错了SB3常开和常闭的接法,改正后电路实现长动和点动的功能。
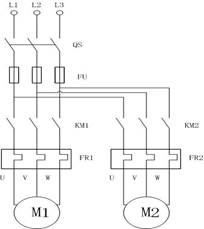
2、自动往复循环控制电路
(1)电路图:


(2)工作原理:
当SB2按下以后,SB2常闭将断开,KM2线圈所在支路断电,而KM1线圈会吸合它的常开触点,形成自锁,保持电机的运转。直到到达限位开关SQ2的位置,SQ2打开的瞬间,KM1线圈失电,不再向前运动,同时,与之相连的SQ2常开开关闭合会使得KM2线圈得电,电机会逆转。当达到限位开关SQ1的位置,SQ1打开的瞬间,KM2线圈失电,不再向前运动,同时,与之相连的SQ1常开开关闭合会使得KM1线圈得电,电机会反转。
(3)调试和结果:
这个电路比较简单,两个人一起连,没有出错。
3、顺启逆停
(1)电路图:
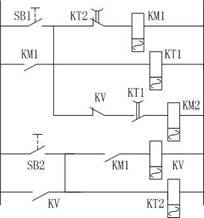
(2)工作原理:
SB1按钮按下以后,KM1线圈得电,电机1开始转动,它的常开触点闭合形成了自锁,并且使得时间继电器KT1的线圈得电,时间继电器KT1的设置时间到了以后,它所控制的常开触点将闭合,会使得KM2线圈得电,电机1开始转动,这样就完成了SB1按钮控制的电机1先转,过一段时间电机2再转的功能。
SB2按钮按下以后,KV线圈得电,它的常开触点吸合,使得KV线圈得电并自锁,它的常闭触点断开,使得KM2线圈断电,电机2停转,使得时间继电器KT2线圈得电。当时间继电器KT2设置的延时时间到了以后,KT2线圈控制的常开触点打开,KM1线圈失电,电机1停转。由此,按钮SB2就实现了电机2先停,过一段时间后电机1再停的功能。
(3)调试和结果:
这个电路不复杂,很快就连好了,实现了顺起逆停的功能。
4、星形--三角形降压启动
(1)电路图:
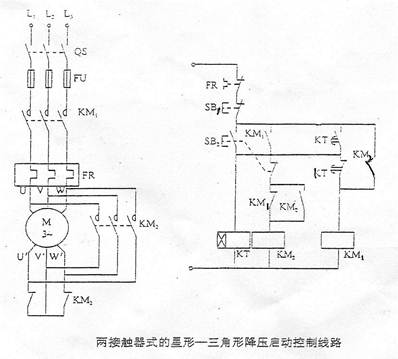
(2)工作原理:
SB2按钮闭合以后,其常开开关会打开,KM2线圈不会得电,而KM1线圈得电,它的常开触点闭合,从而使得KM1线圈通电自锁,此时就是电机的星形启动状态。当KT设置的延时时间到达以后,它的常闭触点打开,KM1线圈断电,它的常开触点闭合,使得KM2线圈得电,KM2的常开触点闭并保持了自锁状态,同时使得KM1线圈得电,KM2线圈还能保持通电,此时,电机就是三角形启动。而SB1按钮是停车按钮。
(3)调试和结果:
线连好,按下SB2,电动机没有动起来,仔细检查才发现由于粗心节点A忘记练了,加以改正后,实现了电路要求的功能。
5、定子绕组串电阻降压启动的控制线路
(1)电路图:

(2)工作原理:
SB2按钮按下以后,KM1线圈得电,KM1常开触点闭合使得它的线圈通电并自锁,此时串入电阻的KM1主电路接通,且KT线圈一直通电。当KT设置的延时时间到达以后,KT的常开触点闭合使得KM2的线圈闭合,线圈的得电使KM1线圈失电,同时KM2常开触点闭使KM2线圈通电并自锁,即用KM2线路短路了串电阻的KM1线路。SB1为停车按钮。
(3)调试和结果:
这个电路连线较简单,顺利实现了星三角启动功能。
6、能耗制动控制
(1)电路图:

(2)工作原理:
当SB1按钮按下后,KM1线圈得电,KM1常开触点闭合,线圈通电并自锁。当需要停车时,按下SB2按钮,一方面KM1线圈所在支路断电,电机不再通电,但是由于惯性很大还是需要一段时间才能停止。如果要让它以很快的速度停下来,我们还使SB2按下以后,KM2线圈通电,KM2线圈的通电在主电路上能使得电机相对于原来KM1线圈通电转动的反方向转动。同时KT也通电,当KT的延时时间到达以后,断开了KM2线圈通电的支路,这个反作用在适当时间内起到了停止的效果。
(3)调试和结果:
做这个电路时出现的问题都是在主电路上。电路一启动就短路了。仔细检查后发现KM2有一处接错了,改正后仍然短路,再检查发现原来是上一次电路的一根线未拆掉,改正后才实现能耗制动的功能。
7、日光灯原理图
(1)电路图:

(2)工作原理:
当开关接通的时候,电源电压立即通过镇流器和灯管灯丝加到启辉器的两极。220伏的电压立即使启辉器的惰性气体电离,产生辉光放电。辉光放电的热量使双金属片受热膨胀,两极接触。电流通过镇流器、启辉器触极和两端灯丝构成通路。灯丝很快被电流加热,发射出大量电子。这时,由于启辉器两极闭合,两极间电压为零,辉光放电消失,管内温度降低;双金属片自动复位,两极断开。
镇流器在启辉器把电路突然中断的瞬间,由于自感现象而产生一个瞬时高压加在灯管上,满足激发水银蒸汽导电需要高压的要求,使日光灯管成为通路开始发光.日光灯正常工作时,从图中可以看出交流电不断通过镇流器和灯管,由于自感现象镇流器的线圈中产生自感电动势阻碍电流变化,起到降压作用,灯管两端电压比220V低很多,满足正常工作要求.
(3)调试和结果:
这个电路是使用220V的交流电,不要求连线,只要弄懂原理即可。刚开始我只知道镇流器产生瞬间高压 使灯管内的气体导电。问过胡老师后才弄懂全部原理。
第二篇:特种电机及其控制实验报告
电气工程及其自动化专业实验
实验名称: 直流无刷电机实验
实验报告书
科 目: 特种电机及其控制
专 业: 电气工程及其自动化
班 级: 05111001
学 号: 0511100109
姓 名: 曾 稀
指导教师: 杨 佳 义
重庆邮电大学移通学院
20##年6月
直流无刷电机实验
一. 实验目的
1. 了解直流无刷电机的运行原理
2. 掌握直流无刷电机的DSP控制。
二. 实验内容
1. 实现无刷直流电机的正反转控制
2. 实现无刷的速度调节
3. 实现无刷直流电机电流环和速度环双环闭环控制
三. 原理简介
1. 直流无刷电机的原理
无刷直流电动机的结构原理图如图2-1所示:

图1 直流无刷电动机的结构原理图
无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C相绕组分别与功率开关管V1、V2、V3相接。位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。其原理框图如图2所示。

图2 直流无刷电动机的原理框图
2. 直流无刷电机的控制
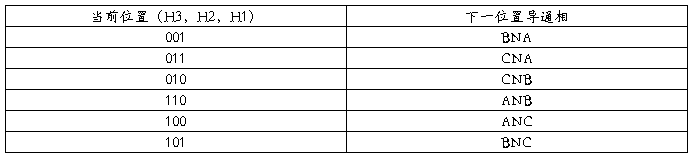
直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。在无刷直流电机的运行过程中,霍尔位置传感器不断检测电机当前位置,控制器根据当前位置信息来判断下一个电子换向器的导通时序。如图3所示

图1 电子换向器的工作原理
图中H1、H2和H3分别表示霍尔位置传感器的信号,H1的有效期为X轴到u轴的正半周,H2的有效器为V轴到y轴的正半周,H3的有效期为W轴到z轴的正半周,有效是霍尔对应的信号为1。电机在各个位置的电子换向器的导通状态供6中,分别为ANC、BNC、BNA、CAN、CNB和ANB,其中以ANC为例表示电机A相到C相的正导通,其他以此类推。电子换向器的控制关键在于在检测到当前位置的同时开通下一个位置导通状态的电子开关,各当前位置与下一位置电子开关的导通相如表1所示。
正向:

反向:
四.实验步骤
1. 设置EVA的PWM1~PWM6作为无刷直流电机的驱动输出,三相霍尔信号作为输入信号
2. 设置定时器TIME1,PWM调制频率约为20KHz,占空比一般不超过50%,并设置好T1的周期中断。
3. 在T1的周期中断函数中,根据三相霍尔信号,来决定当前的换向(调节ACTRA寄存器)
4.调节PWM的占空比,可以调节无刷直流电机的转速
5.设置ADC采样时间,一般在T1的周期中断中启动ADC转换,并把各相电流值作均值滤波,作为电流反馈量。
6.采用数字PI算法完成电流闭环控制
7.采用光电编码器作为速度反馈信号输入DSP的QEP3和QEP4,并设置T4为QEP工作方式
8.采用数字PI算法完成单度闭环控制。
9.采用级连方式作双环控制,其中环的输出作为电流环的指令输入。
五.思考题
1. 试述无刷直流电机的工作原理
答:无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体 ,为了检测电动机转子的极性,在电动机内装有位置传感器。
2. 如何调节无刷直流电机的转向和速度
答:可以用三极管或mos管搭成桥式驱动电路。
3. 试述闭环控制的优点
答:闭环控制有助于提高系统的精度和稳定性,从而提高生产效率和品质。
六.实验感想
通过这次实验,使我学到了不少实用的知识,更重要的是,做实验的过程,思考问题的方法,这与做其他的实验是通用的,真正使我们受益匪浅。对电力拖动制动控制系统有了一个全面的认识,加深了对课本知识的理解,提高了动手能力,总的来说有很大的收获。