合肥学院机械工程系毕业设计(论文)文件--
合肥学院机械工程系
毕业设计(论文)
开题报告
 题目: 电动智能小车
题目: 电动智能小车
专业 机械 年级 2011级
姓名 邹宗耀 学号 1106014018
指导教师 汪珺 职称 实验师
20##年3 月 3日
毕业设计(论文)开题报告
第二篇:智能小车智能蔽障算法研究(开题报告)
目录
1 课题背景 ..................................................1
1.1 课题背景 ............................................................ 1
1.2 课题的目的和意义 .................................................... 2
2 文献综述 ..................................................2
2.1国内外智能汽车发展状况 .............................................. 2
2.2基于不同避障方式的智能车 ............................................ 3
2.3智能车自动平衡技术现状 .............................................. 4
2.4智能车自动避障技术现状 .............................................. 4
2.5智能车路径计算和避障研究 ............................................ 6
3 研究方案 ..................................................8
3.1研究内容及目标 ...................................................... 8
3.2技术路线 ............................................................ 9
3.3技术难点及解决办法 ................................................. 10
3.4创新之处 ........................................................... 10
4 论文计划安排 .............................................11
4.1论文安排 ........................................................... 11
4.2 论文计划 ........................................................... 11
参考文献...................................................12
Ⅰ
智能小车智能避障算法研究(开题报告) 1
智能小车智能避障算法研究
机设104班 (10100872) 王立人
摘要:智能机器人是如今工程研究的热点,在工业和航空航天领域,智能车已作为一种重要的人力替代被广泛应用。本研究将在智能车能够双轮直立且自主循迹的基础上,通过自动控制方法来引导车辆前进,并通过控制系统避让行进过程中的障碍物。本研究结果将提供障碍物识别以及自动避障控制理论的新方法,为自主机器人的避障研究提供一些参考。最终实现两轮平衡车通过数字摄像头传感器在指定环境中上准确的判断路障并在一定速度下安全行驶。
关键字:智能车,障碍物识别,避障算法,控制系统
1 课题背景
1.1 课题背景
智能汽车的研究始于20世纪50年代初,美国 Barrett Electronics公司开发出世界上第一台自动引导车辆系统(Automated Guided Vehicle System,AGVS)。与此同时,Basrrett 电子公司研制出牵引式小车系统,对钢丝索导引的路径进行跟踪。其后,美国国防部也将智能小车应用纳入其研究范畴中,NASA火星探测智能移动机器人Spirit和Opportunity都包含了路径跟踪内容;第三代军用智能汽车SmarTruck III能够利用光电信息技术探测,满足有路和无路条件下的车辆自动驾驶。在欧洲, 20世纪80年代,意大利帕尔玛大学实验研制出ARGO实验车,配备有障碍物自主避让及跟踪系统。它借助于车前的视觉探测器实现障碍物检测避让和路径跟踪,是一种基于立体视觉的智能系统。在亚洲,日本60年代也开始了智能汽车的研究,其中Toyota公司推出了Lexus LS460智能泊车辅助系统,通过对前后座摄像头的图像进行处理,利用其结果来控制电子动力方向盘,从而命令其自主泊车。在我国,智能车的研究也在同步进行。清华大学智能技术与系统国家重点实验室研制的THMR系列机器移动车,其车载设备包括磁罗盘、摄像机、差分GPS、电子地图等等,以保证其控制系统能够接受自主驾驶和辅助驾驶。19xx年,沈阳金杯汽车厂研制的6台用于汽车发动机装配用的自动引导小车,可以是说是中
智能小车智能避障算法研究(开题报告) 2
国自主研发自动引导小车在实践应用中较成功的案例。
1.2 课题的目的和意义
智能汽车及智能公交系统是将来道路交通的发展趋势,而实现其的基础则是智能机器人。本课题基于现有的智能车的研究成果,利用全国大学生“飞思卡尔”杯智能汽车竞赛这个平台,对智能汽车进行功能开发,为未来的智能汽车提供参考。
智能机器人有着极为广泛的应用前景。结合传感器技术和自动控制技术可以使智能车实现各种预设的功能,如泊车,寻迹,导航等。随着控制算法研究的深入,我们已经实现了智能车的速度控制和直立式智能车的平衡控制。能够自动避障的智能车将极大地简化驾驶员的驾驶任务,甚至取代人类驾驶员,达到完全自主和安全的驾驶。智能机器人也不受工作环境和工作时间的限制,能够代替人类在复杂甚至危险的环境中工作,是灾难救援,地区安全保障和自然探索中非常重要的工具。因此提升智能机器人的性能,开发智能机器人的功能等是非常有意义且具有前景的研究方向。
2 文献综述
2.1国内外智能汽车发展状况
智能车(Intelligent Vehicle, IV),也称作无人地面车辆(Unmanned Ground Vehicle, UGV),是一个集环境感知、动态决策与规划、智能控制与执行等多功能于一体的综合系统[1],相关技术涉及信息工程、控制科学与工程、计算机科学、机械工程、数理科学、生命科学等诸多学科,是衡量一个国家科研实力和工业水平的重要标志。[1]
在智能驾驶技术的研究方面,国外起步较早,已经论证了技术的可行性并进行了实路测试,典型的研究代表如美国卡耐基梅隆大学的NavLab-5[2]与Boss[3]智能车、谷歌公司的Google Driverless Car、意大利帕尔马大学的The ARGO vehicle[4,5]、德国联邦国防军大学的VaMP智能驾驶系统[6]等。到90 年代中后期,美国陆军提出未来战斗系统(Future Communications Commission,FCS),包含的多种核心武器都涉及到智能驾驶技术[7]。吉林大学是我国最早的智能车研究单位之一。王荣本教授带领的智能车课题组从
智能小车智能避障算法研究(开题报告) 3
上世纪80 年代后期开始智能车自主导航的研究,在环境感知、导航技术等方面有较为深入的研究,研发出的智能车具有遥控驾驶和自主行驶两种方式,可在无人操作的情况下自己按照驾驶标识路线前进,同时已具备简单环境中的直线、弧线行驶等功能。[8] 清华大学汽车系“安全与节能”国家重点实验室李克强教授主持研制的THASV 智能车侧重于汽车主动安全研究,在视觉导航、主动避障、离线报警等方面取得了较突出的研究成果,目前正在进行智能巡航控制系统、前碰撞预警系统等技术的实用化工作。
作为智能汽车的基础,智能小车在近年也有非常快速的发展。机器人比赛是近几年在国际上迅速开展起来的一项高科技活动,虽然历史不长,但由于集高新技术、娱乐、比赛于一体。所以引起了众多学者的广泛关注和极大的兴趣。机器人小车子系统作为整个系统的执行机构,其性能好坏对整个系统起着至关重要的作用。飞思卡尔大赛作为众多机器人竞速赛中规模最大的比赛,数年中已经吸引了数百所大学参与。该竞赛以竞速赛为基本竞赛形式,辅以创意赛和技术方案赛等多种形式。竞速赛以统一规范的标准硬软件为技术平台,制作一部能够自主识别道路的模型汽车,按照规定路线行进,并符合预先公布的其他规则,以完成时间最短者为优胜。创意赛是在统一限定的基础平台上,充分发挥参赛队伍想象力,以创意任务为目标,完成研制作品;竞赛评判由专家组、现场观众等综合评定。技术方案赛是以学术为基准,通过现场方案交流、专家质疑评判以及现场参赛队员投票等互动形式,针对参赛队伍的优秀技术方案进行评选,其目标是提高参赛队员创新能力,鼓励队员之间相互学习交流。我校积极参与飞思卡尔竞赛,并在数年的竞赛中取得了不俗的成绩。
2.2基于不同避障方式的智能车
以全国大学生“飞思卡尔”杯智能汽车竞赛的要求为背景,要求智能车在相对高速的运行状态下能够准确的避让一定体积的障碍物并且不影响路径识别和继续前进。由此,衍生出许多种障碍物识别和避让的方法。
2.2.1 摄像头识别避障
使用数字或者模拟摄像头,对赛道和障碍物进行统一的识别。 优点是简化传感器
智能小车智能避障算法研究(开题报告) 4
数量,节省安装和调试难度,缺点是摄像头容易采集到不必要的信息,对算法的设计提出了更高的要求。
2.2.2 红外测距避障
使用红外距离传感器进行避障,通过感应车身周围一定距离内的障碍情况来识别障碍物。优点是借助了障碍物在车辆行进路线上占据体积的特点,判断准确;缺点是需要另外安装传感器,而且红外传感器的距离判断是线性的,有判断死角,可能导致漏判或者避让不足。
2.2.3 超声传感器避障
超声传感器工作原理类似于红外传感器,但其探测范围是扇形的,弥补了红外传感器的探测死角,缺点是成本较高且数据处理较摄像头更为复杂。将其与摄像头结合使用也可能导致智能车行驶过程过于保守。
2.3智能车自动平衡技术现状
两轮机器人的平衡问题一直是智能机器人研究领域中的一个热点问题。19xx年,日本首先开始了自平衡两轮机器人的研究,美国、瑞士等国家也相继研制出多种自平衡两轮机器人,其中控制器的设计大多采用了经典或现代控制理论。经典控制理论中PID参数的设定往往需要十分复杂的调试过程,而现代控制理论需要得到控制对象精确的数学模型,才能设计出期望的控制器。李潮全等人使用依据完整约束下的方程拉格朗日方程对两轮平衡小车进行了力学建模,计算了机器人的状态空间方程,并证明了同轴两轮机器人是可控的,并且给出了机器人在-0.25 rad的倾斜角度下能够恢复并维持动态平衡,响应时间小于2s;在受到干扰时能够快速恢复平衡,平均响应时间小于3s,系统动态特性很好的结论。[9]李明爱等人针对自平衡两轮机器人复杂的动力学特性,提出分层模糊控制的思想,设计2个模糊控制器分别对机器人体的偏移角度和轮的转动速度进行控制,由决策器进行智能判断和协调,输出控制量,以实现机器人的平衡控制。[10]
2.4智能车自动避障技术现状
智能小车智能避障算法研究(开题报告) 5
智能小车的避障问题也是机器人路径规划问题中很重要的一部分,机器人路径规划问题同样一直是机器人学的一个非常重要的研究课题。机器人路径规划问题是指在有障碍物的工作环境中,如何寻找一条从给定起点到终止点的较优的运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有的障碍物,且所走路径最短。目前已有许多种算法来解决路径规划问题,如启发式图搜索算法、人工势场法、可视图法、遗传算法等。这些方法都具有各自的优点,但也存在着一定的局限性。人工势场法的基本思想是认为机器人的移动空间是一个虚拟力场,由目标产生引力,障碍物对机器人排斥,机器人在合力的作用下向目标移动。[11]向量场直方图法是将移动机器人作为中心,建立一维的极线直方图表示行驶环境,对线速度和角速度分别进行控制,这个方法较好地解决了人工势场法丢失环境细节信息的问题。曲率速度法以及动态窗口法把避障问题转化为二维速度空间的部分优化问题。也有文献基于模糊逻辑控制方法,并且引入人的经验,来实现机器人避障的功能,但难点在于模糊规则难以确定。根据不同的环境特点选取不同的算法也是提高路径规划性能的一个有效途径。邓高峰等人提出了一种障碍环境下机器人路径规划的蚁群粒子群算法,该混合算法在时间效率上优于蚁群算法,在求精效率上优于粒子群算法,是综合两种算法长处的一种新的启发式算法,达到时间性能和优化性能上的双赢,获得了非常好的效果。[12]
目前,基于传感器的不同,机器人避障方法主要有超声避障、激光避障、视觉避障等方法。由于视觉传感器获取的信息量大,内容丰富,因此基于视觉的移动机器人导航和避障成为重点研究的方向之一。Ohya将摄像机拍摄到的场景图像分成5个区域,计算出每个区域的像素平均值并与设定的阈值进行比较来确定可行区域,但该方法要求背景环境单纯,否则极易发生误判。[13]Kyoung让机器人事先记忆环境中的一些图像,然后在行进时将获取得场景图像与存储的图像进行比对,如果在某区域产生差异则表示有障碍物存在。[14]Taylor等提出一种以Boundary Place Graph搜索未知环境的方法,对环境中的物体都贴上路标(Landmark),机器人避障时只要环绕着物体的边界前进直到下一
[15][16]个路标出现。还有一种基于光流的障碍物检测方法,该方法对于障碍物运动时检测
智能小车智能避障算法研究(开题报告) 6
有显著的效果,但是当障碍物太小或静止不动时光流分析将会失败。除此之外,应用光流法对图像进行处理时,需要处理大量的数据,因此实时性受到影响。徐玉华[11]等人采用二维激光测距仪获取环境信息,针对阈值敏感性问题,提出一种基于自适应阈值求可行方向的移动机器人避障新方法:在离前方的障碍物较远时,阈值选得较大,使机器人能较早地发现较远处的障碍或者可行通道,并对行驶方向做出调节,使机器人向可行通道驶去,以免进入局部“死区”。离前方的障碍物较近时,阈值选得较小,使机器人能够获得近处的障碍信息,以免“忽视”了身边的障碍,并通过实验验证了算法的有效性。使用激光传感器,使机器人能够有效的避让固定的障碍物,为传感器的选择提供了借鉴。闻帆[17]等人设计了新的模板匹配方法用来搜索机器人的可行区域;利用基于粒子滤波的方法对模板进行更新。使机器人能有效地躲避室内环境下的各种静态和动态障碍物。他们的研究为障碍物的识别方法提供了新的有效的方法。赵祚喜等人使用bug算法进行避障,结合DistBug算法、VisBug算法得到较短路径的“相遇点”与“脱离点”的确定方法,基于按分段直线与速度窄间法结合得到圆滑自然路径的绕行障碍物边缘算法。[18]还提出“虚拟触角”的概念来分析利用传感器数据,机器人依靠多种“虚拟触角”实现基于传感器的改进Bug算法。此类研究优化和整合了多种算法,为避障策略提供了新的想法。樊晓平等人在分析人工势场法抖动问题的基础上,增加了一个指数项到引力场函数中,消除了奇异值点,用这种方法避免了抖动现象。并且通过对敏感度的调节,还能够克服传统势场法中目标点在斥力作用范围内时,机器人无法到达目标点的缺陷。
2.5智能车路径计算和避障研究
2.5.1路径路况识别
摄像头能够采集到车辆正前方所有的图像信息,利用得到的图像,我们可以对车辆即将行驶的区域有个明确的了解。具体算法介绍如下:
(1)对传回的图像进行二值化处理,使其变为简单的黑白图像。若是数字摄像头,则能跳过这一步。对处理后的图像进行滤波,去噪点甚至矩阵变换等工作,使其成为具有明显特征,易于处理的图像。
智能小车智能避障算法研究(开题报告) 7
(2) 分别识别出赛道的左右边界,并根据远近的不同对图像不同部分的数据进行加权处理, 由左右边界得到行驶路径在图上的坐标,由此获得中线的位置。比较实际中线位置与理想中线位置的坐标值,得到位置偏差。
(3)建立位置偏差和舵机转动角度所对应的PWM脉宽关系的模型,拟合二者的函数关系曲线。在这里我们认为舵机转动的角度是和PWM脉宽成线性的正比关系,因此以一次函数来唯一确定 PWM 脉宽与舵机转动角度之间的关系。实时生成PWM波形,并输出至舵机。
2.5.2平衡控制
平衡控制主要采用PID算法进行控制,PID控制具有实现简单,效果好的特点。使用陀螺仪测量车身静态角度,用陀螺仪测量水平方向上的加速度,陀螺仪能直接很精确的得到角速度的值,然后积分得到角度。两者结合就可以得到精确的角度和角速度。将角度和角速度数值进行了一定的处理后,就可以通过PID控制器来控制车模的平衡,只需调节PID的参数就可以让车模直立起来。
2.5.3避障算法
避障算法初步以摄像头作为主要的传感器,在图形处理过程中识别出障碍物并进行避让。避障算法的主要难点在于路径余量的控制和障碍物避让后车身的回正。
避障算法可以由两种方式来实现:
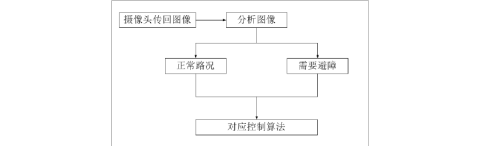
1)使用摄像头作为唯一的传感器。由于飞思卡尔的规则细则中明确规定,障碍物将是两块黑色的砖头,所以这种障碍物具有明显的色彩特征。在图像处理时,最简单的情况下,黑色的障碍物将会被认为是赛道的边界而进行统一的计算。这种算法的优点是简化传感器和算法,但是缺点是算法余量不足,容易导致车辆直接撞上障碍物,如果放大车辆的行驶余量,则会导致小车在其他路况下表现过于保守,不利于竞速。所以对障碍物进行辨认是有必要的。使用摄像头,可以通过识别图像上黑块的面积(宽度)来辨认是正常的轨道边界还是障碍物,以调整对应策略,使用灵活的算法进行蔽障。此种方
智能小车智能避障算法研究(开题报告) 8
法的流程图如图1所示。
2)使用其他距离传感器。我们也可以使用红外或者超声波传感器,来直观地检测障碍物。这种方法的好处是能够直接检测到障碍物的存在,以便调整应对策略,难点在于控制方法的切换如何做到柔性过度,使车辆顺畅得在两种运行方案间切换。此种方法的流程图如图2所示。
图1 摄像头避障流程图
图2 其他传感器避障流程图
3 研究方案
3.1研究内容及目标
本课题将在已经取得的成就的基础上,对更复杂路况下,路径计算和平衡控制进行研究。采用数字摄像头作为传感器,使用方便,图像清晰度高,能够尽量多的获取路况信息。通过对摄像头不同取景范围的分析,尝试各种可能的想法,使用先进的图像处理技术,并寻找出一套简单使用的障碍物识别和避让算法。主要工作包括以下几个方面:
(1)

研究摄像头取景范围对控制算法的影响。通过改变摄像头的高低、角度、前瞻
智能小车智能避障算法研究(开题报告) 9
等,对不同位置时,信号的采集和判断能力进行分析,选出较好的安装位置。
(2) 研究如何区分摄像头采集到不同路段的信号并做相应的处理。根据飞思卡尔大赛的规则明细,我们需要判断四种基本的路况并做相应的分析。在直道,弯道,虚线和十字路口的情况下小车均能正常通过且在此基础上能够避让明显的障碍物。
(3) 尝试一些新型信号滤波融合算法,比较小车的动态和静态稳定性。比如四元素法、卡尔曼、长期短期融合等方法,分析各自优缺点,并选出最理想的。
(4) 最后将所有功能整合,对小车性能参数进行调试。主要是PID的参数调节,不断的改变参数然后观察小车运行状态直到一个最佳参数。
3.2技术路线
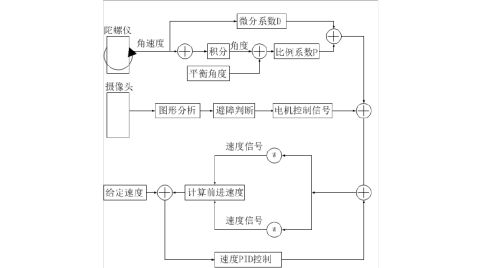
根据本课题的研究内容,拟定的技术路线如下图所示。
图3 控制策略图
智能小车智能避障算法研究(开题报告) 10
具体步骤如下:
以20ms为控制周期,进行以下工作:
(1) 数据信号采集:采集编码器,陀螺仪,加速度器及摄像头传回的数据。
(2) 将加速度计信号和陀螺仪信号融合,计算出电机平衡控制分量。
(3) 处理并分析图像信号,区别出路径的边界以为障碍物,获得控制小车前进的路径数据。
(4) 测量当前小车速度将其和给定速度比较计算出电机速度控制分量。
(5) 将电机分量相加并分别输出给相应的电机。
3.3技术难点及解决办法
本课题可能遇到的技术难点及解决办法如下:
(1) 信号采集问题:直立小车运行姿态的稳定性对摄像头的视野范围影响极大,需要有优秀的平衡控制算法作为研究的前提,以保证摄像头的采集范围合适且基本不变。
(2) 路径分析问题:摄像头在不同光源环境下对路况信息的表现区别很大,需要使用自适应的方法使其返回的数据尽量特征明显,便于分析;摄像头数据量大,需要过滤无用的信息,保留有用的道路信息,可以通过算法计算图形与赛道的相关性来实现。
(3) 快速前进稳定性问题:当小车以一定速度前进时,图像相比静态会产生一定灰度,使得高速下图像变得模糊,应使用对应的还原算法还原赛道的特征或者在模糊的图像中提取出特征参数。
3.4创新之处
本研究使用数字摄像头作为唯一传感器,同时执行避障及路径识别功能,并使用二轮小车作为载体,是传统直立小车功能的扩展。在本研究中也优化和简化了一些图像处理技术,使其能够更为简单的应用到实际的工作中,并将对综合性的路径判断算法提供一定参考。
智能小车智能避障算法研究(开题报告) 11
4 论文计划安排
4.1论文安排
论文内容安排如下:
第一部分:引言,介绍课题背景和研究目的及意义。
第二部分:自主平衡小车的电路设计,介绍电路原理及其功能。
第三部分:自主平衡小车的智能避障算法讨论,分析不同算法处理问题的优缺点。 第四部分:自主平衡小车的智能避障算法实况模拟,根据小车运行状态分析并调试优化,并确定最后参数。
第五部分:自主平衡小车的智能避障算法实验结论,总结研究成果。
4.2 论文计划
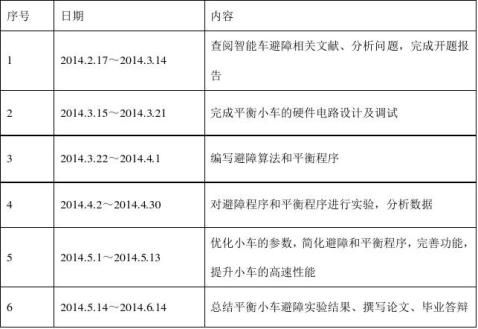
工作安排和进度时间表如下:
表4.1 工作安排和进度
智能小车智能避障算法研究(开题报告) 12
参考文献
[1]徐友春,章永进,王肖等.智能车的研究现状与发展趋势[C].//第六届中国智能交通年会暨第七届国际节能与新能源汽车创新发展论坛论文集.2011:129-134.
[2]R.Bishop. Intelligent vehicle applications worldwide. IEEE Intelligent Systems and Their Applications, 2000, 15(1): 78-81.
[3]D.A.Pomerleau, T.M.Jochem. Rapidly adapting machine vision for automated vehicle steering. IEEE Expert, 1996, 11(2).
[4]C.Urmson, J. Anhalt, D.Bagnell, et al. Autonomous driving in urban environments: Boss and the urban challenge. Journal of Field Robotics, 2008, 25(8): 425-466.
[5]A.Broggi, M.Bertozzi, A.Fascioli. The 2000 km test of the ARGO vision-based autonomous vehicle. IEEE Intelligent Systems, 1999, 55-64.
[6]A.Broggi, M.Bertozzi, A.Fascioli, et al. Automatic vehicle guidance: the experience of the ARGO vehicle. World Scientific. Singapore, 1999.
[7]M.Maurer, R.Behringer, F.Thomanek, et al. A compact vision system for road vehicle guidance. Proceedings of the 13th International Conference on Pattern Recognition. Vienna, Austria, 1996.
[8]王荣本, 张荣辉, 金立生. 区域交通智能车导航控制技术. 农业机械学报, 2007, 38(7):39-42.
[9]李潮全,高学山,李科杰等.基于完整约束的两轮机器人建模及平衡控制[J].控制工程,2012,19(3):478-481.DOI:10.3969/j.issn.1671-7848.2012.03.027.
[10]李明爱,焦利芳,乔俊飞等.自平衡两轮机器人的分层模糊控制[J].控制工程,2009,16(1):80-82,94.DOI:10.3969/j.issn.1671-7848.2009.01.023.
[11]徐玉华,张崇巍,徐海琴等.基于激光测距仪的移动机器人避障新方法[J].机器人,2010,32(2):179-183.
[12]邓高峰,张雪萍,刘彦萍等.一种障碍环境下机器人路径规划的蚁群粒子群算法[J].控制
智能小车智能避障算法研究(开题报告) 13
理论与应用,2009,26(8):879-883.
[13]OHYA A,KOSAKA A,KAK A.Vision—based navigation by a mobile robot with obstacle avoidance using single camera vision and ultrasonic sensing[J].IEEE Transactions on Robotics and Automation,1998,14(6):969-978.
[14]KYOUNG S R,WANG H L,IN S K.Obstacle detection and self-localization without camera calibration using pmjec—live invariant[c]//Proc IEEE/RSJ International Conference on Intelligent Robots and System.Grenoble,France,1997.
[15]TAYLOR C J,KRIEGMAN D J.Vision—based motion planning and exploration algorithms for mobile robots[J].IEEE Trans on Robotics and
Automation,1998,14(3):417-426.
[16]YOUNG G S,HONG T H,HERMAN M,YANG J C S.New visual invariant for obstacle detection using optical flow induced from general motion[C]//Proc IEEE Workshop on Applications of Computer Vision.Palm Springs,CA,1992.
[17]闻帆,屈桢深,王常虹等.未知环境下的移动机器人实时避障研究[J].哈尔滨工程大学学报,2009,30(7):751-756.DOI:10.3969/j.issn.1006-7043.2009.07.006.
[18]赵祚喜,汪宁,张智刚等.一种适用于非360°探测机器人的避障导航算法[J].机械工程学报,2010,46(19):44-52.DOI:10.3901/JME.2010.19.044.
[19]Jason Hardy,Mark Campbell.Contingency Planning over Probabilistic Obstacle Predictions for Autonomous Road Vehicles[C].//2010 IEEE/RSJ International Conference on Intelligent Robotics and Systems. [v.3].2010:2237-2242.