单片机运动控制系统设计
摘 要
本文介绍了利用红外反射式传感器实现小车自动寻迹的设计与实现。本设计中的小车能够自动识别路线 ,......。
......。
关键词:自动寻迹;传感器;单片机;机器人;数据采集
Abstract
This article introduces the design and execution of auto-searching for track by usage of the reflected infrared sensor on the auto-guided car. The car discern the routs automatically, .......
.......
Keyword: Auto-tracking;Infrared Sensor; Single-chip microcomputer; Robot; Data Collection
目 录
1 绪 论.................................................................... 1
1.1机器人的运动控制背景................................................... 1
1.2 本设计的应用及意义.................................................... 1
1.3 论文主要工作.......................................................... 1
2 系统总体方案.............................................................. 2
2.1 系统总体规划.......................................................... 2
2.2 单片机内部结构及接口描述.............................................. 2
2.3 技术指标.............................................................. 2
2.4 主要芯片的选型........................................................ 2
2.4.1 电机驱动芯片的选型................................................ 2
2.4.2温度传感器芯片的选型............................................... 3
2.5 其他芯片的简介........................................................ 3
2.5.1 ATMEL 93C46....................................................... 3
2.5.2 LCD1602........................................................... 3
2.5.3 74HC540.......................................................... 3
2.5.4 74HC245........................................................... 3
3 硬件设计与实现............................................................ 4
3.1系统运动控制部分设计................................................... 4
3.1.1 电机选型.......................................................... 4
3.1.2 L298N驱动电机.................................................... 4
3.2 寻迹模块设计.......................................................... 4
3.3无线电发射接收模块介绍................................................. 4
3.4测温系统设计........................................................... 5
3.5 电源.................................................................. 5
3.5.1电源的选型......................................................... 5
3.5.2稳压电路设计....................................................... 5
3.5.3抗干扰设计......................................................... 5
4 测试及其控制程序设计...................................................... 6
5 总结与展望................................................................ 7
致 谢...................................................................... 8
参考文献.................................................................... 9
附录1 机器实体照片........................................................ 10
1 绪 论
近年来,人类的生产和生活方式发生了巨大的变化,产生这一变化的重要原因就是计算机技术的飞速发展。第一台计算机诞生至今仅仅几十年的时间,计算机的性能已经大大提高,价格不断的下降,从而使之可以迅速而广泛地应用于人类的生产和生活的各个领域。然而机器人的发展无疑得益于计算机技术的发展。
......
1.1 机器人的运动控制背景
什么叫机器人?
......
1.2 本设计的应用及意义
本文的设计正是一个本着学习、创新和服务人类的思想的机器人设计。让机器按照自己预定的想法和目的运作,一直是我人生的追求和梦想。我选择自动化专业,正是要加入自动化这个大家庭,吸收文化不断提高自己,不断的走近自己的梦想。
.....
1.3 论文主要工作
本论文主要的工作就是通过一个自动寻线小车的软件、硬件和整体结构的设计和实现,......。
2 系统总体方案
本章围绕系统的总体设计,介绍系统组成框图、主控芯片单片机的内部硬件资源及其接口技术、整个机器人系统所用到的其它IC的介绍。
2.1 系统总体规划
整个系统的构成是由两部分组成。一部分的用于整个机器人系统的运动控制, 一部分的机器人体内装载的传感器件,负责检测和采集现场的环境参数。
......
2.2 单片机内部结构及接口描述
......
......,P3口也接收一些控制信号,如表 2-1所示。
表 2-1 各口线的特殊功能和信号名称

......
2.3 技术指标
......
2.4 主要芯片的选型
......
2.4.1 电机驱动芯片的选型
考虑到,本机器人需要的驱动能力比较高,......。
......,外型如图2-4示。
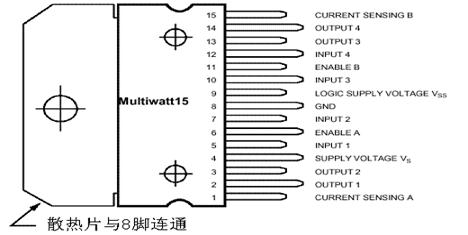
图2-4 L298N外型
2.4.2 温度传感器芯片的选型
考虑到......。
2.5 其他芯片的简介
本设计是......。
2.5.1 ATMEL 93C46
IC:93c46是储存器件(如图2-6示),负责储存机器人系统中温度采集系统采集到的温度参数。
......
2.5.2 LCD1602
......
2.5.3 74HC540
......
2.5.4 74HC245
74HC245是8总线收发......。
......
3 硬件设计与实现
本设计的机器人采用废弃的电脑光驱机盒钢板做为整个硬件体系的骨架,......。
3.1 系统运动控制部分设计
3.1.1 电机选型
......
3.1.2 L298N驱动电机
......
L298N芯片已在电机驱动芯片的选型一节介绍过,本设计中具体应用电路进行说明,如图3-1示。
......
3.2 寻迹模块设计
......
3.3 无线电发射接收模块介绍
本设计采用辅助模块,无线电发射模块原理图如图3-14示,就是为了达到远程手动控制的目的,由于无线电的设计涉及的学科知识面比较广,调频比较困难。故此本设计直接应用市场上的成品无线电模块,出于成本的考虑,选用的无线电的有效控制距离是比较短的,但是这个不限制本设计功能的实现,距离的远近用户完全可以根据需要更换模块。
......
......................................,驱动电流约2mA,与发射器上的四个按键一一对应。
......,表3-1中5个输出引脚10、11、12、13、VT的“0”代表低电位OV,1代表高电位5V。
表3-1 接收模块输出电位表

续表3-1

3.4 测温系统设计
本设计采用LCD1602作为显示器件,相比数码管显示,显示内容丰富更加丰富、显示方式更为灵活,而且硬件电路得到简化。LCD1602作为一款非常经典的液晶显示模块,具有良好的性价比,完全符合和满足本设计的要求。
......
3.5 电源
3.5.1 电源的选型
由于本系统需要电池供电,我们考虑了如下集中方案为系统供电。
......
3.5.2 稳压电路设计
......
3.5.3 抗干扰设计
由于此单片机控制的运动系统,工作在各种恶劣的环境中,所以抗干扰处理是必不可少的。
......
4 测试及其控制程序设计
......
5 总结与展望
......
致 谢
自从我接触单片机,到现在能够用以单片机为控制核心设计出我的毕业设计——单片机运动控制系统设计。这是一个学习的过程,......。
......
参考文献
......
[12] 高稚允,高岳. 光电检测技术[M]. 北京:国防工业出版社,1995.
[13] 金篆芷,王明时. 现代传感技术[M]. 北京:电子工业出版社,1995
[14] 罗志增 .简易红外接近觉传感器 [C].全国青年第三届机器人学研讨会论文集 ,1990.
[15] Brian W. Kernighan & Dennis M. Ritchie . The C Programming Language (The second Edition). Prentice-Hall , 1988.
......
附录1 机器实体照片
001100
0
第二篇:毕业设计论文范文参考—-—摘要、目录、正文、致谢、参考文献、附录
单片机运动控制系统设计
摘 要
本文介绍了利用红外反射式传感器实现小车自动寻迹的设计与实现。本设计中的小车能够自动识别路线 ,......。
......。
关键词:自动寻迹;传感器;单片机;机器人;数据采集
Abstract
This article introduces the design and execution of auto-searching for track by usage of the reflected infrared sensor on the auto-guided car. The car discern the routs automatically, .......
.......
Keyword: Auto-tracking;Infrared Sensor; Single-chip microcomputer; Robot; Data Collection
目 录
1 绪 论.................................................................... 1
1.1机器人的运动控制背景................................................... 1
1.2 本设计的应用及意义.................................................... 1
1.3 论文主要工作.......................................................... 1
2 系统总体方案.............................................................. 2
2.1 系统总体规划.......................................................... 2
2.2 单片机内部结构及接口描述.............................................. 2
2.3 技术指标.............................................................. 2
2.4 主要芯片的选型........................................................ 2
2.4.1 电机驱动芯片的选型................................................ 2
2.4.2温度传感器芯片的选型............................................... 3
2.5 其他芯片的简介........................................................ 3
2.5.1 ATMEL 93C46....................................................... 3
2.5.2 LCD1602........................................................... 3
2.5.3 74HC540.......................................................... 3
2.5.4 74HC245........................................................... 3
3 硬件设计与实现............................................................ 4
3.1系统运动控制部分设计................................................... 4
3.1.1 电机选型.......................................................... 4
3.1.2 L298N驱动电机.................................................... 4
3.2 寻迹模块设计.......................................................... 4
3.3无线电发射接收模块介绍................................................. 4
3.4测温系统设计........................................................... 5
3.5 电源.................................................................. 5
3.5.1电源的选型......................................................... 5
3.5.2稳压电路设计....................................................... 5
3.5.3抗干扰设计......................................................... 5
4 测试及其控制程序设计...................................................... 6
5 总结与展望................................................................ 7
致 谢...................................................................... 8
参考文献.................................................................... 9
附录1 机器实体照片........................................................ 10
1 绪 论
近年来,人类的生产和生活方式发生了巨大的变化,产生这一变化的重要原因就是计算机技术的飞速发展。第一台计算机诞生至今仅仅几十年的时间,计算机的性能已经大大提高,价格不断的下降,从而使之可以迅速而广泛地应用于人类的生产和生活的各个领域。然而机器人的发展无疑得益于计算机技术的发展。
......
1.1 机器人的运动控制背景
什么叫机器人?
......
1.2 本设计的应用及意义
本文的设计正是一个本着学习、创新和服务人类的思想的机器人设计。让机器按照自己预定的想法和目的运作,一直是我人生的追求和梦想。我选择自动化专业,正是要加入自动化这个大家庭,吸收文化不断提高自己,不断的走近自己的梦想。
.....
1.3 论文主要工作
本论文主要的工作就是通过一个自动寻线小车的软件、硬件和整体结构的设计和实现,......。
2 系统总体方案
本章围绕系统的总体设计,介绍系统组成框图、主控芯片单片机的内部硬件资源及其接口技术、整个机器人系统所用到的其它IC的介绍。
2.1 系统总体规划
整个系统的构成是由两部分组成。一部分的用于整个机器人系统的运动控制, 一部分的机器人体内装载的传感器件,负责检测和采集现场的环境参数。
......
2.2 单片机内部结构及接口描述
......
......,P3口也接收一些控制信号,如表 2-1所示。
表 2-1 各口线的特殊功能和信号名称

......
2.3 技术指标
......
2.4 主要芯片的选型
......
2.4.1 电机驱动芯片的选型
考虑到,本机器人需要的驱动能力比较高,......。
......,外型如图2-4示。
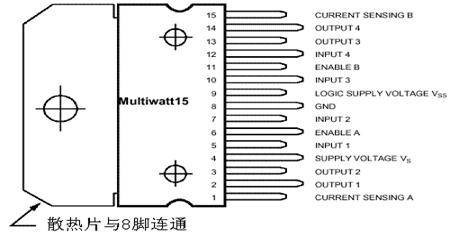
图2-4 L298N外型
2.4.2 温度传感器芯片的选型
考虑到......。
2.5 其他芯片的简介
本设计是......。
2.5.1 ATMEL 93C46
IC:93c46是储存器件(如图2-6示),负责储存机器人系统中温度采集系统采集到的温度参数。
......
2.5.2 LCD1602
......
2.5.3 74HC540
......
2.5.4 74HC245
74HC245是8总线收发......。
......
3 硬件设计与实现
本设计的机器人采用废弃的电脑光驱机盒钢板做为整个硬件体系的骨架,......。
3.1 系统运动控制部分设计
3.1.1 电机选型
......
3.1.2 L298N驱动电机
......
L298N芯片已在电机驱动芯片的选型一节介绍过,本设计中具体应用电路进行说明,如图3-1示。
......
3.2 寻迹模块设计
......
3.3 无线电发射接收模块介绍
本设计采用辅助模块,无线电发射模块原理图如图3-14示,就是为了达到远程手动控制的目的,由于无线电的设计涉及的学科知识面比较广,调频比较困难。故此本设计直接应用市场上的成品无线电模块,出于成本的考虑,选用的无线电的有效控制距离是比较短的,但是这个不限制本设计功能的实现,距离的远近用户完全可以根据需要更换模块。
......
......................................,驱动电流约2mA,与发射器上的四个按键一一对应。
......,表3-1中5个输出引脚10、11、12、13、VT的“0”代表低电位OV,1代表高电位5V。
表3-1 接收模块输出电位表

续表3-1

3.4 测温系统设计
本设计采用LCD1602作为显示器件,相比数码管显示,显示内容丰富更加丰富、显示方式更为灵活,而且硬件电路得到简化。LCD1602作为一款非常经典的液晶显示模块,具有良好的性价比,完全符合和满足本设计的要求。
......
3.5 电源
3.5.1 电源的选型
由于本系统需要电池供电,我们考虑了如下集中方案为系统供电。
......
3.5.2 稳压电路设计
......
3.5.3 抗干扰设计
由于此单片机控制的运动系统,工作在各种恶劣的环境中,所以抗干扰处理是必不可少的。
......
4 测试及其控制程序设计
......
5 总结与展望
......
致 谢
自从我接触单片机,到现在能够用以单片机为控制核心设计出我的毕业设计——单片机运动控制系统设计。这是一个学习的过程,......。
......
参考文献
......
[12] 高稚允,高岳. 光电检测技术[M]. 北京:国防工业出版社,1995.
[13] 金篆芷,王明时. 现代传感技术[M]. 北京:电子工业出版社,1995
[14] 罗志增 .简易红外接近觉传感器 [C].全国青年第三届机器人学研讨会论文集 ,1990.
[15] Brian W. Kernighan & Dennis M. Ritchie . The C Programming Language (The second Edition). Prentice-Hall , 1988.
......
附录1 机器实体照片
001100000