微机原理复习总结
第二章
★正数的反码与原码相同;
★负数的反码,是原码的符号位不变,其它各位求反。
x 0 ≤ x ≤ 2n-1 – 1
[x]反 =
2n–1 -|x| -( 2n-1 – 1)≤ x ≤ 0
3.补码
x 0 ≤ x < 2n-1 – 1
[x]补 =
2n + x - 2n-1≤ x < 0
★ 正数的补码与原码相同
★ 负数的补码是:原码的符号位不变,其余各位求反加1。
补码简单求法
(1)符号位不变,数值部分从低位开始向高位逐位行进,在遇到第一个1以前,包括第一个1按原码照写;第一个1以后,逐位取反。
例:[x]原 = 1 0 0 1 1 0 1 0
↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
[x]补 = 1 1 1 0 0 1 1 0
↑ ↑ ↑
不变 求反 不变
[-128]补=[-127-1]补=[-127]补+[-1]补=1000 0000
3. 补码运算溢出判别
运算结果,超出了计算机所能表示的数的范围称为溢出。
例:73 + 72 = 145 > 127
[x]补=01001001 (+73)
+ [y]补=01001000 (+72)
1 0 0 1 0 0 0 1
补码运算发生溢出情况:
1.同号数相加,可能溢出;
2.异号数相减,可能溢出。
2.1.1 计算机硬件基本结构
由运算器、控制器、存储器、输入设备和输出设备等五个基本部分组成。
微型计算机的分类
按用途分:
? 通用微型计算机
? 嵌入式计算机
按微型计算机的组成和规模分:
? 多板机
? 单板机
? 单片机
? 微机的系统总线按功能分成三组:
? 数据总线DB:
地址总线AB:
控制总线CB:
8086是Intel系列的16位微处理器,有16根数据线和20根地址线。因为可用20位地址,所以可寻址的地址空间达220即1M字节单元。
总线接口部件(BIU):段寄存器、指令指针寄存器(IP)、地址加法器、内部暂存器、指令队列及I/O控制逻辑等部分组成。
执行部件EU:负责指令的执行,包括通用寄存器、专用寄存器、标志寄存器及ALU等部分组成。
CS:16位代码段寄存器 DS:16位数据段寄存器 SS:16位堆栈段寄存器
ES:16位附加段寄存器
AX:累加器 BX:基址(Base)寄存器 CX:计数(Count)寄存器
DX:数据(Data)寄存器
SP:堆栈指针寄存器 BP:基址指针寄存器
SI:源变址寄存器 DI:目的变址寄存器
Flag:状态标志寄存器 IP:指令指针寄存器
假设CS=8211H,IP=1234H,则该指令单元的20位物理地址为:PA= 8311H×10H+1234H=83110H+1234H=84344H
物理地址=段基址×10H+偏移地址
CS ×16+IP
SS ×16+SP(BP)
DS(ES) ×16+SI(DI)
1. 指令
指令是计算机能够识别和执行的指挥计算机进行操作的命令。计算机是通过执行指令序列来解决问题的。
指令系统是指微处理器能执行的各种指令的集合。不同的微处理器有不同的指令系统。
计算机指令码由操作码字段和操作数字段两部分组成。操作码字段指出所要执行的操作,而操作数字段指出指令操作过程中需要的操作数。
2. 操作数
操作数是指令的操作对象。8086/8088指令系统中的操作数分为两类:数据操作数、转移地址操作数。
(1) 数据操作数
按存储位置,数据操作数分为:立即数、寄存器操作数、内存操作数、I/O操作数。
1) 立即数:指令中直接给出操作数本身。
2) 寄存器操作数:即操作对象是寄存器中的内容。例上述指令中AL为寄存器操作数。
3) 内存操作数:也称为存储器操作数,操作对象是内存中的数。
4) I/O操作数:指令中要操作的数据来自或送到I/O端口。
(2) 转移地址操作数
这类操作数出现在程序跳转或程序调用指令中,指出程序要转移的目的地址。它也可以分为:立即数、寄存器操作数、存储器操作数,即要转移的目标地址包含在指令中或存放在寄存器、内存储器中
1 立即寻址
MOV AX ,1234H ;AX ← 1234H
2 寄存器寻址
MOV DX ,AX ;DX ← AX
注意:
(1)当指令中的源操作数和目标操作数均为寄存器时,必须采用同样长度的寄存器;
(2)两个操作数不能同时为段寄存器;
(3)目标操作数不能是代码段寄存器(CS)。
除以上两种寻址方式外,下面5种寻址方式的操作数均在存储器中,统称为内存寻址方式。当采用内存操作数时,必须注意双操作数指令中的两个操作数不能同时为内存操作数。
3 直接寻址
(1) MOV AX,[2000H] ;AX ← (DS:2000H)
(2) MOV [1200], BL ;(DS:1200H) ← BL
(3) MOV ES:[0100], AL ;(ES:0100H) ← AL
说明:DS:2000表示内存单元地址;
(DS:2000)表示地址是DS:2000的内存单元内容。
4 寄存器间接寻址
8086/8088中可用于间接寻址的寄存器有基址寄存器BX、BP和变址寄存器SI、DI。为区别于寄存器寻址,寄存器名要用“[]”括起。
例:MOV AX,[SI] ;AX ← (DS:SI+1,DS:SI)
有效地址EA计算方法如下:
物理地址PA计算方法如下:
物理地址 = DS × 10H + SI 或 DI 或 BX
或
物理地址 = SS × 10H + BP
注意:不同的寄存器所隐含对应的段不同。采用SI、DI、BX寄存器,数据存于数据段中;采用BP寄存器,数据存于堆栈段中。
5 寄存器相对寻址
操作数的有效地址:
EA1 = SI/DI/BX + 8位disp/16位disp(disp代表偏移量)
或 EA2 = BP + 8位disp/16位disp
操作数的物理地址:
PA1 = DS × 10H + EA1
或 PA2 = SS × 10H + EA2
(1)偏移量是有符号数,8位偏移量的取值范围为:00~FFH(即+127~-128);16位偏移量的取值范围为:0000~FFFFH(即+32765~-32768)。
(2)IBM PC汇编允许用三种形式表示相对寻址,它们的效果是一样的,如:
MOV AX,[BX]+6 ;标准格式
MOV AX,6[BX] ;先写偏移值
MOV AX,[BX+6] ;偏移值写在括号内
6 基址变址寻址
操作数的有效地址为:
EA1 = BX + SI / DI
或 EA2 = BP + SI / DI
当基址寄存器选用BX时,数据隐含存于数据段中;当基址寄存器选用BP时,数据隐含存于堆栈段中,即操作数的物理地址为:
PA1 = DS × 10H + EA1
或 PA2 = SS × 10H + EA2
7 相对基址变址寻址
操作数的有效地址为:
EA1 = BX + SI/DI + 8位/16位 disp
或 EA2 = BP + SI/DI + 8位/16位 disp
当基址寄存器选用BX时,数据隐含存于数据段中;当基址寄存器选用BP时,数据隐含存于堆栈段中,即操作数的物理地址为:
PA1 = DS × 10H + EA1
或 PA2 = SS × 10H + EA2
8086/8088指令系统按其功能可分6类:
1. 数据传送指令
2. 算术运算指令
3. 逻辑指令
4. 串操作指令
5. 控制转移指令
6. 处理机控制指令
①MOV指令传送数据的位数由寄存器或立即数决定,dst和src数据位数必须相同?下面的一些用法是错误的:
MOV ES,AL;
MOV CL,4321H?
②MOV指令中的dst和src两操作数中必有一个是寄存器,不允许用MOV实现两存储单元间的传送?若需要时,可借助一个通用寄存器为桥梁,即:
MOV AL,[SI]; 通过AL实现(SI)和(DI)所指的两存储单元间的数据传送
MOV [DI],AL?
③不能用CS和IP作目的操作数;
④不允许在段寄存器之间直接传送数据;
⑤不允许用立即数作目的操作数;
⑥不能向段寄存器送立即数,要对段寄存器初始化赋值,必须通过CPU的通用寄存器?
例如:
MOV AX,DATA; 将数据段地址DATA通过AX装入DS中
MOV DS,AX?
例:以下指令均为合法的传送指令,括号中为目标操作数与源操作数的寻址方式。
1) MOV AL,5 ;(寄存器,立即数)
2) MOV AX,BX ;(寄存器,寄存器)
3) MOV DS,AX ;(段寄存器,寄存器)
4) MOV AX,DS ;(寄存器,段寄存器)
5) MOV ES:VAR,12 ;(存储器,立即数)
6) MOV WORD PTR [BX],12 ;(存储器,立即数)
其中:VAR为符号地址;WORD PTR指明存储器的属性是字属性。
) 进栈指令PUSH
格式: PUSH src
src可以是:r16、seg、m16
功能:堆栈指针减2,并将寄存器、段寄存器或存储器中的一个字数据压入堆栈。
即:① SP ← SP - 2
② (SP+1,SP) ← (src)
执行过程可描述为:先减后压
) 出栈指令POP
格式: POP dest
dest可以是:r16(除CS外)、seg、m16
功能:将栈顶元素弹出送至某一寄存器、段寄存器(除CS外)或存储器,堆栈指针加2。
即: ① (dest) ← (SP+1,SP)
② SP ← SP + 2
执行过程可描述为:先弹后加
由于XCHG指令不允许同时对两个存储单元进行操作,因而必须借助于一个通用寄存器。①先把一个存储单元中的数据传送到通用寄存器;②再将通用寄存器中的内容与另一个存储单元内容进行交换;③把通用寄存器中的内容回传给第一个存储单元。
换码指令 XLAT
格式:XLAT
源操作数、目标操作数均隐含。
功能:把数据段中偏移地址为BX+AL的内存单元的内容传送到AL中,即:AL←(BX + AL)。
1) 对外设端口操作时,当端口地址在0~255范围内,寻址方式可选用直接寻址,也可选用间接寻址;当端口地址大于255时,只能选用间接寻址,并且地址寄存器只能用DX。
(2) 数据寄存器只能用AL(字节操作)或AX(字操作)。当使用AX时,对IN指令来说:是将port或DX所指向的端口数据读入AL,将port+1或DX+1所指向的端口数据读入AH;对OUT指令来说:是将AL寄存器内容送port或DX所指向的端口,将AH寄存器内容送port+1或DX+1所指向的端口。
数据传送指令除SAHF、POPF指令对标志位有影响外,其余指令对标志位无影响。
串操作指令共有5条,串传送指令MOVS、串装入指令LODS、串送存指令STOS、串比较指令CMPS、串扫描指令SCAS。
控制转移指令包括:转移指令、循环控制指令、过程调用指令和中断指令等4类。
(1) 中断调用指令 INT n
格式:INT n
功能:产生一个类型为n的软中断
操作:
① 标志寄存器入栈;
② 断点地址入栈,先CS入栈,后IP入栈;
③ 从中断向量表中获取中断服务程序入口地址,即:
IP ← (0000:4n+1,0000:4n)
CS ← (0000:4n+3,0000:4n+2)
(2) 溢出中断指令 INTO
格式:INTO
功能:检测OF标志位,当OF=1时,产生中断类型为4的中断;当OF=0时,不起作用。
操作:
① 标志寄存器入栈;
② 断点地址入栈,先CS入栈,后IP入栈;
③ 从中断向量表中获取中断服务程序入口地址,即:
IP ← (0000:0011H,0000:0010H)
CS ← (0000:0013H,0000:0012H)
) 中断返回指令IRET
格式:IRET
功能:从中断服务程序返回断点处,继续执行原程序。IRET指令是中断服务程序执行的最后一条指令。
操作:
① 断点出栈,先IP出栈,后CS出栈;
② 标志寄存器出栈;
第五章
⑴ AD15~AD0(双向,三态)
为低16位地址/数据的复用引脚线。
⑵ A19/S6~A16/S3(输出、三态)
⑶ /S7(输出,三态)为高8位数据总线允许/状态复用引脚。
⑷ (输出,三态)
读信号,当其有效时(低电平)表示正在对存储器或I/O端口进行读操作,若M/ 为低电平,表示读取I/O端口的数据;若M/ 为高电平,表示读取存储器的数据。
⑸ READY(输入)
为准备就绪信号。
⑹ (输入)为测试信号,低电平有效。
⑺ INTR(输入)
可屏蔽中断请求信号,高电平有效。
⑼ RESET(输入)
复位信号,高电平有效。
⑽ CLK(输入)
时钟信号,它为CPU和总线控制电路提供基准时钟。
⑾ 电源和地
VCC为电源引线,单一的+5V电源。
引脚1和20为两条GND线,要求均要接地。
⑿ MN/ (输入)
为最小/最大模式信号。
第六章
1.RAM
特点:
RAM的读写次数无限。
如果断开RAM的电源,其内容将全部丢失。
RAM的分类 :
静态RAM(SRAM,Static RAM)
动态RAM(DRAM,Dynamic RAM)
2. ROM
掩膜ROM:掩膜ROM简称ROM,是由芯片制造的最后一道掩模工艺来控制写入信息。
PROM(Programmable ROM):可由用户一次性写入的ROM,如型熔丝PROM 。
EPROM(Erasable Programmable ROM):可擦除的可编程只读存储器。如紫外线擦除型的可编程只读存储器。
E2PROM(Electrically Erasable Programmable ROM):也称为EEPROM,是可以电擦除的可编程只读存储器。
闪速存储器(Flash Memory):闪速存储器是新型非易失性存储器,在系统电可重写。
【例6.3】某8086系统(最大组态)的存储器系统如图所示:
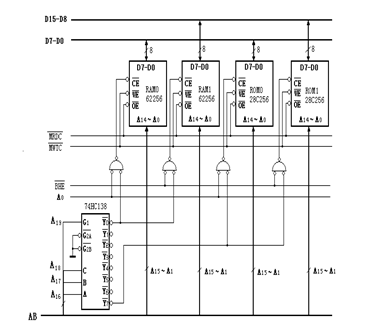
RAM0和RAM1组成的存储器的地址范围为80000H~8FFFFH,RAM0是偶存储体,RAM1是奇存储体。
ROM0和ROM1组成的存储器的地址范围为F0000H~FFFFFH,ROM0是偶存储体,ROM1是奇存储体。
第七章
1:(1)输入输出口的传送方式:
I/O端口与内存统一编址
I/O端口独立编址
(2)CPU与外设之间的传送方式
特点:以CPU为中心,由输入/输出程序实现数据传输。
两种方式:无条件传输
条件传输(查询方式)
无条件传输方式 :一般用于能够确信外设已经准备就绪的场合。如读取开关的状态,LED的显示等。
条件传输方式 : CPU不断读取并测试外设的状态,如果外设处于“准备好”状态(输入设备)或“空闲”状态(输出设备),则输入或输出数据。对于条件传输来说,一个条件传输数据的过程一般由三个环节组成:
(1) CPU从接口中读取状态字;
(2)CPU检测状态字的相应位是否满足“就绪”条件,如果不满足,则转⑴;
(3) 如状态位表明外设已处于“就绪”状态,则传输数据。
2:直接存储器存取(DMA)
DMA方式是指不经过CPU的干预,直接在外设和内存之间进行数据传输的方式。1次DMA传输需要执行1个DMA周期(相当于1个总线读或写周期)。
实现DMA方式,需要专门的接口器件来控制外设接口和内存之间的数据传输,它被称为DMA控制器(DMAC)。
采用DMA方式进行数据传输时,使用系统的数据总线、地址总线和控制总线。
3:DMA操作的基本方法有三种:
(1) CPU停机方式。指在DMA传送时,CPU停止工作,不再使用总线。该方式比较容易实现,但由于CPU停机,可能影响到某些实时性很强的操作,如中断响应等。
(2) 周期挪用方式。利用窃取CPU不进行总线操作的周期,来进行DMA传送。这一方式不影响CPU的操作,但需要复杂的时序电路,而且数据传送过程是不连续的和不规则的。
(3) 周期扩展方式。该方式需要专门时钟电路的支持,当传送发生时,该时钟电路向CPU发送展宽的时钟信号,CPU在加宽时钟周期内操作不往下进行;另一方面,仍向DMAC发送正常的时钟信号,DMAC利用这段时间进DMA传送。
第八章
1:中断源可分为两大类:
外部中断(硬件中断)
内部中断(软件中断)
常见的中断源有:
⑴ 外部设备的请求,如CRT终端、键盘、打印机等;
⑵ 由硬件故障引起的,如电源掉电,硬件损坏等;
⑶ 实时时钟,如定时器芯片等;
⑷ 由软件引起的,如程序错、运算错、为调试程序而设置的断点等。
2:中断系统的功能:
⑴ 能实现中断响应、中断服务及中断返回。
⑵ 能实现中断优先权排队
⑶ 能实现中断嵌套:
3:中断处理过程
(1).中断请求
(2).中断判优
(30.中断响应
通常中断响应的操作过程应包括(由硬件实现):
? 保留断点地址
? 关闭中断允许(关中断)
? 转入中断服务程序
(4).中断处理 (由中断服务程序完成 )
开中断*(弱允许中断嵌套)
保护现场
完成中断服务
恢复现场
(5). 中断返回
6:可屏蔽中断INTR
受CPU中断允许标志位IF的控制,即IF=1时,CPU才能响应INTR引脚上的中断请求。
当可屏蔽中断被响应,CPU需执行7个总线周期,才转入中断服务程序。即:
(1)在第一个总线周期内通知外部中断系统CPU已响应;
(2)在第二个总线周期,从中断源读取中断类型号;
(3)执行一个总线写周期,将标志寄存器内容压栈,同时使IF为0,TF为0;
(4)执行一个总线写周期,把CS内容压栈;
(5)执行一个总线写周期,把当前IP内容压栈;;
(6)执行一个总线读周期,从中断向量表中读取中断服务程序的偏移地址并送IP;
(7)执行一个总线读周期,从中断向量表中读取中断服务程序的段地址并送CS。
7:非屏蔽中断NMI信号连到CPU的NMI引脚,它不受CPU中断允许标志位IF的控制
8:内部中断(软件中断)
除法错中断:执行除法指令时,若除数为0或商超过寄存器所能表达的范围,则CPU立即产生一个中断类型号为0的中断。
溢出中断:如果上一条指令使溢出标志位OF为1,则执行INTO指令产生中断,溢出中断的中断类型号为4。
INT n指令中断:在执行中断指令INT n时产生的一个中断类型号为n的内部中断。
单步中断:当单步标志(陷阱标志)TF置“1”时,80x86处于单步工作方式。在单步工作时,每执行完一条指令,CPU自动产生中断类型号为1的中断。
断点中断:断点中断是80x86提供的一种调试程序的手段。用于设置程序中的断点,中断类型号为3。
9:中断优先级(由高到低):
除法错、溢出、INT n指令、断点中断
非屏蔽中断
可屏蔽中断INTR
单步中断
10:中断向量:把各个中断服务子程序的入口都称为一个中断向量;
中断向量表:将这些中断向量按一定的规律排列成一个表,就是所谓的中断向量表,当中断源发出中断请求时,即可查找该表,找出其中断向量,就可转入相应的中断服务子程序。
向量表地址:中断向量在中断向量表中的位置。
8086中断系统中的中断向量表是位于0段的0~3FFFH的存贮区内,每个中断向量占四个单元,其中前两个单元存放中断处理子程序的入口地址的偏移量(IP),低位在前,高位在后;后两个单元存放中断处理子程序入口地址的段地址(CS),也是低位在前,高位在后,整个中断向量的排列是按中断类型号进行的。
CPU响应中断后,将中断类型号×4,在中断向量表中“查表”得到中断服务程序入口地址,分别送CS和IP,从而转入中断服务程序。
例给定(SP)=0100H,(SS)=0300H,(FLAGS)=0240H,存储单元的内容为(00020H)=0040H,(00022H)=0100H,在段地址为0900H及偏移地址为00A0H的单元中有一条双字节中断指令INT 8,试问执行INT 8指令后,SP,SS,IP,CS的内容是什么?栈顶的三个字是什么?
11:设置中断向量的方法:
将中断服务程序的入口地址直接写入中断向量表中的相应单元:
MOV AX , 0000H
MOV DS , AX
MOV SI , 中断类型号 * 4
MOV AX , 中断服务程序偏移地址
MOV [SI], AX
MOV AX , 中断服务程序段地址
MOV [SI+2] , AX
二是利用DOS功能调用完成中断向量的设置:
中断向量设置(DOS功能调用 INT 21H)
功能号:AH=25H
入口参数:AL=中断类型号,
DS:DX=中断向量(段地址:偏移地址)
获取中断向量(DOS功能调用 INT 21H)
功能号:AH=35H
入口参数:AL=中断类型号
出口参数:ES:BX=中断向量(段地址:偏移地址)
12:8259A的功能
⑴ 具有8级优先权控制,通过级联可扩展至64级。
⑵ 每一级均可通过编程实现屏蔽或开放。
⑶ 能向CPU提供相应的中断类型号。
⑷ 可通过编程选择不同的工作方式。
13:重要的寄存器
中断请求寄存器(IRR):用于寄存外部设备提出的中断请求,当IR0~IR7中任何一个变为高电平,IRR中的相应位置“1”。
中断服务寄存器(ISR):用于寄存所有正在被服务的中断请求,8259A在接收到第一个信号后,使当前被响应的中断请求所对应的ISR置“1”,而相应的IRR复位。在中断嵌套时,ISR中有多个位为“1”。
中断屏蔽寄存器(IMR):用于寄存要屏蔽的中断。某位为“1”,表示屏蔽相应中断请求,为“0”,表示开放相应中断请求。
14:需要说明的引脚:
A0:地址线,输入,在使用中8259A占用相邻两个端口地址,A0与 配合,A0=1选中奇地址端口,A0=0选中偶地址端口。在80X86的PC系列机中,主片8259A的端口地址为20H和21H。
CAS2~CAS0:级联信号线,对主片8259A,它为输出;对从片8259A,它为输入。主、从片8259A 的CAS2~CAS0对应相连,主片8259A在第一个响应周期内通过CAS2~CAS0送出识别码,而和此识别码相符的从片8259A在接收到第二个信号后,将中断类型码发送到数据总线上。
INT:中断请求信号,输出。与CPU的INTR引脚连接。
:中断响应信号,输入。与CPU的 引脚连接。
15:8259A的工作方式
中断嵌套方式
(1)全嵌套方式。全嵌套方式是8259A最常用的一种工作方式,中断优先级别固定,IR0最高,IR7最低。当IRi中断请求响应时,相应的ISRi位置1,在中断服务过程中禁止同级和优先级低于本级的中断请求。
(2)特殊全嵌套方式。特殊全嵌套方式与全嵌套方式基本相同,只是在特殊全嵌套方式下,可响应同级的中断请求。特殊全嵌套方式一般用于8259A的级联情况。
循环优先方式
(1)优先级自动循环方式。初始时,优先次序为IR0→IR7,IR0最高,IR7最低。当某级中断响应后,则优先级降为最低。而其后的与之相邻的优先级升为最高。如,IR3响应后的优先级次序变为IR4,IR5,IR6,IR7,IR0,IR1,IR2,IR3。
(2)优先权特殊循环方式。优先权特殊循环方式与优先权循环方式相比仅有一点不同,就是在优先权特殊循环方式下,一开始的最低优先权是由编程确定的。
16.中断屏蔽方式
(1)普通屏蔽方式。
(2)特殊屏蔽方式。
结束中断处理方式
(1)自动中断结束方式(AEOI)。
(2)非自动中断结束方式(EOI)。
中断请求触发方式
(1)边沿触发方式
(2)电平触发方式
第九章
1:8253具有3个独立的16位计数器,使用单一+5V电源,采用NMOS工艺,24脚双排直插式封装的大规模集成电路
2.8253主要功能
⑴ 每片有3个独立的16位计数通道。
⑵ 每个计数器可按二进制或十进制来计数,时钟脉冲下降沿使计数器进行减1操作 。
⑶ 每个计数器最高计数速率可达2.6MHZ。
⑷ 每个计数器可编程设定6种工作方式之一。
⑸ 所有输入、输出均与TTL电平兼容,便于与外围接口电路相连。
试题:
填空:
1.8086的数据线为 16 位,地址线为 20 位,I/O口使用 16 位地址线。
2.在某进制的运算中 7×3=33,则7×5=55_。
3.用8位二进制数表示整数时,十进制数(-128)的补码为__。原码为 ,反码为 。
3.8086内部寄存器长度为 16位,通用寄存器有8 个,段寄存器有 4个。
4.8086偶存储体的选片信号是 ,奇存储体的选片信号是 。
5.MOV AX,[BX+SI]的源操作数是___ 寻址方式,目的操作数是 寻址方式。
6.8086可以指向堆栈的指针寄存器有 SP 和 BP 。
7.程序中段定义结束的伪指令是 ,子程序定义结束的伪指令是 。
8.EEPROM的擦除方法为 .
9.下列指令段经汇编后,DATA所代表的偏移地址为_100CH__。
ORG 1000H
STROE DB 12 DUP(?)
DATA DB 05H,06H,07H,08H
选择:
1. 8086/8088在不考虑段跨越情况下,DI寄存器给出的偏移地址位于___。
A. 仅DS段 B. DS或SS段 C. DS或ES段 D. DS或CS段
2. 下列指令中格式错误的是___ _。
A. SHL AL,CX B. XCHG AL,BL
C. MOV BX,[SI] D. AND AX,BX
3. 设(20010H)=3FH,(20011H)=B2H,执行下列指令段后,BX=__ ___。
MOV AX,2000H
MOV DS,AX
MOV BX,[0010H]
A. B2B2H B. B23FH C. 3F3FH D. 3FB2H
4. 若SP=0124H,SS=3300H,在执行INT 60H这条指令后,堆栈栈顶的物理地址为____。
A. 3311CH B. 33120H C. 33122H D. 3311EH
5. 下列指令中格式错误的是___。
A. MOV AX,357AH[BX][DI]
B. OUT DX,AL
C. LEA AX,50H[BX][BP]
D. RCR BX,1
6. 下列指令中允许寻址范围最大的是___。
A. JNZ NEXT B. LOOP NEXT
C. JMP SHORT PTR NEXT
D. CALL NEAR PTR NEXT
7. 8086/8088不属于BIU部分的寄存器是____。
A. IP B. ES C. DS D. SP
8.8086/8088最大模式比最小模式在结构上至少应增加_ __。
A. 中断优先级控制器 B. 总线控制器
C. 数据驱动器 D. 地址锁存器
9. 8086在存取存贮器中以偶地址为起始地址的字时,M/IO、BHE、A0的状态 分别是___。
A. 0,0,1 B. 1,0,1 C. 1,1,0 D. 1,0,0
10. 一个半导体存贮芯片的引脚有 A13~A0,D3~D0,WE,OE,CS,VCC,GND等,该芯片存贮容量为__ ___。
A. 8K×8 B. 8K×4 C. 16K×4 D. 16K×8
简答:
1.写出8086CPU所含14个寄存器的英文标识及中文名称。
AX-------作累加器用
BX-------作基址(Base)寄存器
CX-------作计数(Count)寄存器
DX-------作数据(Data)寄存器
SI-------源变址寄存器
DI-------目的变址寄存器
BP-------基址指针寄存器
SP-------堆栈指针寄存器
(2)段寄存器
CS:16位代码段寄存器(Code Segment Register)
DS:16位数据段寄存器(Data Segment Register)
SS:16位堆栈段寄存器(Stack Segment Register)
ES:16位附加段寄存器(Extra Segment Register)
(3)标志(FLAGS)寄存器
(4)IP寄存器
2.写出8086的7种寻址方式。
立即寻址、寄存器寻址、直接寻址、寄存器间接寻址、寄存器相对寻址、基址变址寻址、相对基址变址寄存
3.在8086系统中,设DS=1000H,ES=2000H,SS=1200H,BX=0300H,SI=0200H,BP=0100H,VAR的偏移量0060H,指出下列指令的目标操作数的寻址方式,若目标操作数为存储数操作数,计算它们的物理地址。
MOV [BX] [SI],AX
MOV ES:[SI],AX
MOV VAR,8
MOV BX,12
MOV 6[BP+SI],AX
4.给定(SP)=0008H,(SS)=0300H,在段地址为1000H及偏移地址为0005H的单元中有一条双字节CALL指令近调用某个子程序,试问执行CALL指令后,SP,SS的内容是什么?
画出堆栈的内容并标出地址。
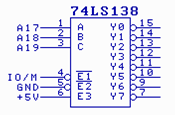
大题
5.某8088系统的内存贮器的译码器采用了一片74LS138,实现全译码方式, 请分析四个输入端Y0~Y3所控制的地址范围是多少?它适合多大容量的存贮器芯片?该存贮器的总容量是多少?