1.CPU�ӹ�������˵�ֳ����֣����߽ӿڵ�ԪBIU��ִ�е�ԪEU
���߽ӿڵ�ԪBIU�Ĺ����Ǹ������CPU��洢����I/O�豸֮������ݴ��͡����������ǣ� �� ָ����г��ֿ��ֽ�(8088CPU 1�����ֽڣ�8086CPU 2�����ֽ�)ʱ�����ڴ�ȡ������ָ�BIUȡָ��ʱ������Ӱ��EU��ִ�У����߲��й�������������CPU��ִ���ٶȡ� �� EU��Ҫ���ڴ������˿ڶ�ȡ������ʱ������EU�����ĵ�ַ���ڴ������˿ڶ�ȡ���ݹ�EUʹ�� �� EU�������������ݻ�����������BIU����ָ�����ڴ浥Ԫ������˿�
2.���߽ӿڵ�Ԫ����4��16λ�μĴ���������μĴ���CS�����ݶμĴ���DS����ջ�μĴ���SS�������ݶμĴ���ES��һ��16λ��ָ��ָ��Ĵ���IP��һ��20λ��ַ�ӷ�����6�ֽ�ָ����л�������һ����EUͨѶ���ڲ��Ĵ����Լ����߿��Ƶ�·��
3.ִ�е�ԪEU����ϵͳ�ⲿֱ�����������Ĺ���ֻ�Ǹ���ִ��ָ��EU�����в�����ɣ�
1��16λ��������Ԫ(ALU)�����ڽ��������������㡣
2��16λ��־�Ĵ���FLAGS���������CPU�����״̬�����Ϳ��Ʊ�־��
3�������ݴ�Ĵ�����Э��ALU������㣬�ݴ�μ���������ݡ�
4��ͨ�üĴ���������4��16λ���ݼĴ���AX��BX��CX��DX��4��16λָ�����ַ�Ĵ���SP��BP��SI��DI��
5��EU���Ƶ�·�����ǿ��ơ���ʱ��״̬����·�����մ�BIU��ָ�����ȡ����ָ�����ָ�������γɸ��ֶ�ʱ�����źţ���EU�ĸ�������ʵ���ض��Ķ�ʱ����
4.�����16λ�Ĵ���ʵ��20λ��ַ��Ѱַ����8086�����˶νṹ���ڴ�����ķ�����
��ָ���������ݷֱ�洢�ڴ���Ρ����ݶΡ���ջ�Ρ��������ݶ��У���Щ�εĶε�ַ�ֱ��ɶμĴ���CS��DS��SS��ES�ṩ��������������ڶ��ڵ�ƫ�Ƶ�ַ�����йؼĴ�����������������
5.CPU����β���20λ��ַ������
CPU�ṩ�������Դ洢��Ԫ���з��ʵ�20λ��ַ����BIU�еĵ�ַ�ӷ��������ġ�
6.8086��ָ�������6���ֽ�����ָ����г���2�����ֽڣ�BIU���Զ�ִ��һ��ȡָ�����ڣ�����һ��Ҫִ�е�ָ����ڴ浥Ԫ����ָ����С����Dz��á��Ƚ��ȳ���ԭ��˳���ţ�����˳��ȡ��EU��ȥִ��
7.ָ����е�����ʹ��EU��BIU�����й���
8.����ջ��PUSH��POPָ��Ҫ�������Ϊ��������ÿ����һ�ν�ջ������SPֵ������2
9.����ϵͳ��ÿ���˿ڷ���һ����ַ�ţ���Ϊ�˿ڵ�ַ��һ���˿�ͨ��ΪI/O�ӿ���·�ڲ���һ���Ĵ�����һ��Ĵ�����
10.CPU����ַ���ߵĵ�16λ��Ϊ��8λI/O�˿ڵ�Ѱַ�ߣ�����8086ϵͳ�ɷ��ʵ�8λI/O�˿���65536(64 K)��������������ڵ�8λ�˿ڿ������һ��16λ�Ķ˿ڡ�
11.��������Ϊ�˸Ľ���������ܣ����ݽṹ���ر��Ƕ�ջ��ֻҪ���ܾ�Ӧ������Ȼ�߽��϶��롣��Ϊ���ڲ�����Ĵ洢���ʣ�������Ҫ�������δ洢���ʲ����������ڶ���ķ��ʣ�ֻҪ����һ�δ洢���ʲ���
12.һ���������ܶ�λ������֮һ�У� 1)ָ���������2) �Ĵ���3) �洢��Ԫ4) I/O �˿�
13.������Ѱַ��ʽ��������Ѱַ���Ĵ���Ѱַ��ֱ��Ѱַ���Ĵ������Ѱַ���Ĵ������Ѱַ����ַ��ַѰַ����Ի�ַ��ַѰַ
14.ֱ�Ӷ˿�Ѱַ��ʽ���˿ڵ�ַ��8λ��ַ���ʾ
��Ӷ˿�Ѱַ��ʽ����ʱI/O�˿ڵĵ�ַ��16λ
15.����ת�Ƶ�ַ��Ѱַ��ʽ������ֱ�ӣ���ԣ�Ѱַ�����ڼ��Ѱַ���μ�ֱ��Ѱַ���μ���Ѱַ
16.���ݴ���ָ���ֿ��Է�Ϊ�������֣� (1) ͨ�����ݴ���ָ� (2) �ۼ���ר�����ݴ���ָ�(3) ��ַ��Ŀ�����ݴ���ָ� (4) ��־���ݴ���ָ��
17.��ַ����ָ�����3��ָ���ȡ��Ч��ַָ��LEA�� �ڽ���ַָ��װ��DS(���ݶμĴ���)ָ��LDS���۽���ַָ��װ��ES(���ӶμĴ���)ָ��LES��
18.I/Oָ���Ŀ�IJ������������ۼ�����8λ������AL��16λ��AX��
I/OѰַ�Ŀڵ�ַ����8λ�ڣ�ֱ��Ѱַ��ʽ����ַ����ʽ��8λ��������16λ���Ĵ������Ѱַ����ַ�ں�װ��DX
8.ָ������������ܲ���Ŀ����룬CPU ����ִ�е��ض����ܵ���䡣
9.αָ�����������һ�ֲ�����Ŀ��������䣬�������ڻ������и�������Ӧ��λ�ࡣ���磬����������д���Ļ������Դ�����м����Σ��ε�������ʲô�����������������̣�����������洢��Ԫ�������ֻ����ʽ�����ȡ���Ȼ��αָ������ǻ������ڻ��ʱʹ�õ�
10.������������ţ������ƣ� ������ ������ ��ע��
һ���������к����У��涨���ַ���&����Ϊ�����еı�־
11.�Ѿ���EQU�����ķ��ţ����Ժ������˾Ϳ�����PURGE��������
12.���ִ�����ָ��:�ظ�ǰָ������־ָ�������ָ����Ƚ�ָ���ɨ��ָ��
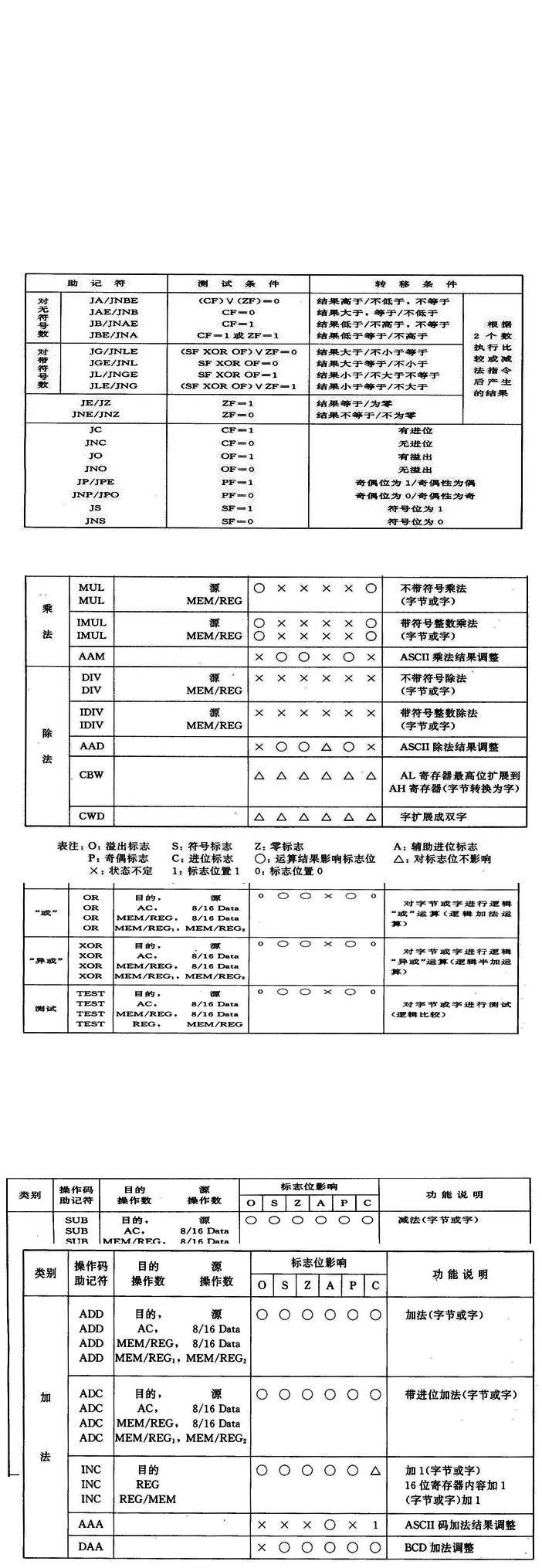
�ֽ�ת��ָ��
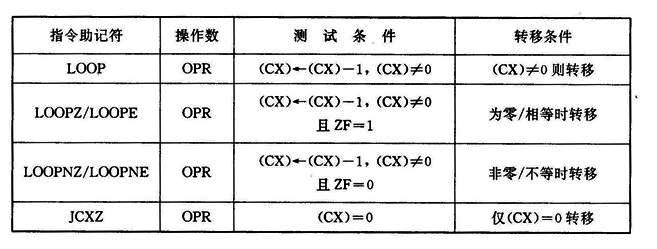
ѭ��ָ����Լ�ת������
�����������������������ʾ�ļ������ֱ��ʶ���ִ�е�һ�ֻ���ָ��ļ��ϡ�
���������ֱ������������Processor���ij���������ԡ�
�����Բ�������ָ��ijһ�־�������ԣ����ǰ����ܶ��������
�ͼ����Էֻ������ԣ��������������ͻ�����ԣ��������ԣ������������Զ���������������ԣ��;��������ָ��ϵͳ������ء�����������ָ������д��������������ָ�����Ƿ�����д����
��������������Ӳ���ṹ��ָ��ϵͳ�أ����и�ǿ�ı����������ɷ���ر�ʾ���ݵ�����ͳ���Ŀ��ƽṹ���ܸ��õ����������㷨����������ѧϰ���ա��������Ա������ɵij������һ����û�����������Ƶij������Ҫ����ִ�е��ٶ�Ҳ�������Ի�������ʺϱ�дһЩ���ٶȺʹ��볤��Ҫ��ߵij����ֱ�ӿ���Ӳ���ij������ԡ�������Ժͻ������Զ������ڱ�д�������������ԡ�
������
���Ƚ��û���������������һ��FAR���̣������һ��ָ��ΪRET��Ȼ���ڴ���ε�������(��FAR����)�Ŀ�ʼ ��������������ָ�PSP��INT 20H ָ��Ķε�ַ��ƫ�Ƶ�ַѹ���ջ��
PUSH DS ������PSP�ε�ַ
MOV AX��0 ������ƫ�Ƶ�ַ0
PUSH AX
. �DZ�����
Ҳ�����û��ij����в�������̶Σ�ֻ�ڴ���ν���֮ǰ(��CODE ENDS֮ǰ)����������䣺
MOV AH��4CH
INT 21H
�����ִ�����Ҳ���Զ�����DOS״̬��
�ڶ�ƪ����еԭ���ܽ�
�����������ͬ�������ǣ��˶��ĵ�Ԫ ����������ǣ�����ĵ�Ԫ ����
�ֵĻ�Բ�뾶ԽС��������ߴ磨Խ�� ��������С�Ļ�Բ�뾶�ᵼ��ѹ���ǣ����� ����
�ó����͵��߷��ɷ����ƽ����߳���ʱ��Ϊʹ�����ֲ��������У�Ӧʹ���ߵģ��ݶ��߲������������ϵ� ����
��Ъ�ֻ����ǽ��������ֵ�����ת����ת��Ϊ���Ӷ�ת�̵ļ�Ъ �����˶���
��е�ĵ�Ч����ѧģ�͵Ľ��������Чԭ���ǣ���Ч���������еĶ���Ӧ�� ��������ϵͳ���ܶ��� ������Ч������Ч���������Ĺ���˲ʱ����Ӧ����������ϵͳ�����������������������Ĺ����������Ĺ���֮�� ����
�߸��ʹ��е�����������ɶ�Ϊ�� -1 ��.
�غ϶� ��ʾһ���ֳ����ϵ�ʱ���ڳ���ת��һ����Բ�ݾ��ʱ����ռ�� 40% ����
��ʾһ���ֳ����ϵ�ʱ���ڳ���ת��һ����Բ�ݾ��ʱ����ռ�� 40% ����

����ΪZ���ֶ�Բ��������Ϊ�µ�б��Բ�������䵱������Ϊ�� ZV=Z/COS3�� ��
б��Բ�����ֵ������Ǧ�ƫ��ʹ�� ����������
�����еĹ����ɷ�Ϊ_ԭ����___�� _�Ӷ���__�� _����__��
���õij��ּӹ������г��η���__���ɷ�_____��
������������λ��ʱ���䣨 �����Ǧã�0 ��
��������������λ���ֵIJ���m��Z������ha*����ͬ������߱�ǰ�ߵģ��ݸ��� ��� ���ֶ�Բֱ�� ���� ���ֶ�Բ�ݺ� ��� ���ܽ� ���� ��
�Ӷ��������λ���ƶ������λ�õ�ת�dz�Ϊ�Ƴ��˶��ǡ�
ֱ��Բ���ֲ����е����ٳ�������ʽ��ʲô��
Zv=Z/cosa
�����˻����е��г��ٱ�ϵ��KΪ��ֵʱ����һ���м������ԣ�
K>1
б���ֵ�ģ����ѹ������_����_��ȡ��ֵ��
�ƶ�����������������___Ħ����__�ڽ�������������������������Ϊһ������������__Ħ��_�ڽ�����������
˵�����ֱ��ת�˶�Ϊֱ���˶��Ļ����� __��������__��___���ֳ���__��
�������������Ҫ������ʲô���� ������������õĻ�е����ת����е�� ��
���г������ϳ���֮Ϊ�����֡��ģ�ʵ�����ǣ����ֻ�����������
���ɻ�����Ҫ�����˶�����������
������������Ƶij��÷�����Ϊ��ת�� �����Ƹ˳��õ��˶������У��˶�ʼĩ�����Գ�������ȼӵȼ�������г�˶����ɡ�
������з�����a����С�ݶ���ϵ�����Ӵ�ѹ���ǡ�
b���ڼӹ�����ʱ���ñ�λ��������
��Ч�����͵�Чת�������ɸ��ݵ�Чԭ����Ч�����ĵ�Ч�������Чת�����������еĶ��ܵ���ԭ��еϵͳ���ܶ�����ȷ����
����ת�Ӿ�ƽ�������� ��ƽ�������������Ĺ�������ʸ���͵����� ������ƽ����������ƽ�������������Ĺ������������ص�ʸ���������� ��
��ʵ�ּ�Ъ�˶��Ļ��������ֻ��� ;���ֻ���;����ȫ���ֻ�����
��Բ���λ�ת����ֱ���Ϳ��ȷֱ�Ϊa��b�������õı�ֵd/b���ھ�ƽ������Ϊ b/a<0.2 �����ڶ�ƽ������Ϊ b/a>=0.2 ��
ʹ�ٶȲ��������� ���� �ķ�Χ�ڣ��Լ����˶��� ���� ��ѹ���͵����ȶԻ����IJ���Ӱ�죬�ǵ��ڻ����ٶȲ�����Ŀ��֮һ��
�����߳��ִ�����������������Ϊ�� ��ȷ��������������������������϶�������� ����
��е�����ٶȲ�����ԭ���ǣ� ��Ч�������ز����ڵ�Ч�����أ�ʹ��е�Ķ��ܷ����仯����� ����
��е���ȶ���תʱ�ڣ���һ���˶�ѭ�����ڵ�ʼĩ�����������迹���Ĵ�С������������ܵ������������� ����
�ڽ�����Ч����ģ��ʱ����Ч�������Ч���أ�������������ϵͳ�е��������������ǰ��� ������� ��ԭ��ȷ���ġ�
�߸��ʹ��ķ����ǣ� ����һ����������������� ��