工业机器人
一. 选择题(30分)
1.机器人要完成任意一个空间作业,一般需要(C)个自由度。
A.3个 B 4个C 6个 D 7个
2.机器人手臂应具有足够的承载能力和刚度,其支撑板通常选用的材料为
(C)
A圆刚管 B 方刚管
C 工子刚 D 异性刚管
3.常用的三自由度手腕不包括哪种形式(A)
A.BBB手腕 B BBR手腕 C RRR手腕 D RBR手腕
4.单自由度机器人手腕的翻转运动通常有(C)实现
A.B关节 B T关节 C R 关节 D.G关节
5.手爪开合常用的驱动方式是(B)
A.液压传动 B.气压传动 C.电气驱动 D.其它形式驱动
6.真空吸附式机器人手部不适用于搬运那种工件(D)
A.表面有孔工件 B.非铁磁材料工件 C.聚乙烯薄膜
D.体积小,质量大的工件
7.动坐标系{0/,u,v,w}与固定坐标系{0,X,Y,Z}初始位置重合,动坐标系作如下运动:绕X轴转动a,绕W轴a,绕有Y 轴转动a。求齐次变换矩阵T(B)
A.T=Rot(x,a) Rot(z,a) Rot(y,a) B. T=Rot(y,a) Rot(x,a) Rot(z,a)
C.T=Rot(y,a) Rot(z,a) Rot(x,a) D. T=Rot(z,a) Rot(x,a) Rot(y,a)
8.下列关于机器人逆运动学的特性说法不正确的是(A)
A. 一定有解 B.解可能不存在 C.可能具有多重解 D.求解方法的多样性
9.已知V为机器人末端在操作空间的广义速度,?
为机器人关节在关节空间中的关节速度,J为其速度雅可比矩阵,则下列 成立的等式为(A)
A.V=J ? B.V=??1? C.V=??? D. ? =??V
10.手部端点力和广义关节力矩t之间的线性映射关系等式为(B)
A t=JF B t=?? ? C t=??1F D t=FJ
二. 判断题(10分)
1.机器人的自由度是根据其用途而设计的,可能少于六个自由度,也可能多于六个自由度。(√)
2.工业机器人的自由度一般是4-6个。(√)
3.RR二自由度手腕实际只是构成单自由度功能(√)
三. 简答题(30分)
1. 一般来说,机器人应该具有哪三大特征?
答:拟人功能、可编程、通用性 详见书p2
2.简述机器人的组成部分及其作用。
答:机器人是由机械系统、驱动系统、控制系统和感知系统四部分组成。
其中,机械系统由机身、肩部、手腕、末端操作器和行走机构组成;工业机器人的机械系统的作用相当于认得身体。
驱动系统可分为电气、液压、气压驱动系统以及它们结合起来应用的综合系统组合;该部分的作用相当于人的肌肉。
控制系统的任务是根据机器人的作业指令程序及从传感器反馈回来的信号,控制机器人的执行机构,使其完成规定的运动和功能;该部分的作用相当于人的大脑。
感知系统由内部传感器和外部传感器组成。其中,内部传感器
用于检测各关节的位置、速度等变量,为闭环伺服控制系统提供反馈信息;外部传感器用于检测机器人与周围环境之间的一些状态变量,如距离、接近程度、接触程度等,用于引导机器人,便于其识别物体并作出相应的处理。该部分的作用相当于人的五官。
3.简述D-H参数法建立Zi轴 Xi 和Yi 轴的方法,并指出包含哪些D-H参数,如何定义这些参数?
四.计算题(30分)
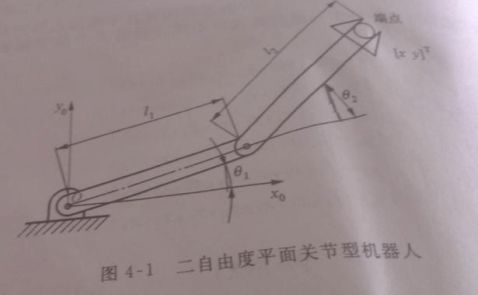
1.如图所示的2R平面机械手,关节变量及连杆参数如图所示,建立关节坐标系,列出各连杆参数,并写出机械手末端中心点p的运动学方程?
6. 齐次坐标。 P51
将一个 n 维空间的点用 n+1 维坐标表示,则该 n+1 维坐标即为 n 维坐标的齐次坐
标。
7. 欧拉角 P62
用来确定定点转动刚体位置的三个一组独立转动角参量,其中每次转动都是相对于动坐
标系进行的
8. 运动学逆解问题 P73
在机器人运动学分析中,已知末端执行器要达到的目标位姿,求解所需的关节变量值叫
做运动学逆解问题。
9. 速度雅克比矩阵 P81
速度雅克比矩阵是一个把关节速度矢量 变换为机器人手爪相对基坐标即固定坐标的广义速度矢量 v的变换矩阵。
10. 广义坐标
用来描述系统位形所需要的独立参数或者最少参数叫做广义坐标。
11. RPY 角 P60
RPY 角是描述船舶在大海中航行或者飞机在空中飞行时姿态的一种方法。将船的行驶方
向取为 z 轴,则 R 表示绕 z 轴的回转(а);将船体的横向取为 y 轴,则 P 表示绕 y 轴俯仰(β);将垂直于船体的方向取为 x 轴,则 Y 表示绕 x 轴的偏角(γ)。
12. 运动学的正解问题
在机器人的运动学分析中,已知各关节变量值,求末端执行器要达到的目标位姿
13. 力雅可比矩阵 P88
在机器静力计算中把手部端点力矢量 τ 的变换矩阵
第二篇:机器人大赛赛后总结
机器人大赛赛后总结
机器人大赛结束了,每个科协人都缓和了一下自己忙碌的节奏。在比赛这段时间里,大家都辛苦地准备了很久,尽管在比赛中有着不尽如人意的地方,比赛也落下了完美的帷幕。
赛后我们认真总结了此次活动中出现的问题。
首先,我们来谈谈赛前准备。(1)报名表中有的信息没有必要,例如学院审核,这会增加其他学院参赛队的麻烦;只需保留学号,姓名,联系方式,和队名,作品名即可,还应注意的是灭火类队名和作品名的区别。(2)一旦报名截止,就不能让参赛队再更改信息。(3)调试场地值班问题,由于值班时间过长,开始时极少有参赛队去调试,因此我们可以缩短调试场地值班时间并将比赛时间适当提前;值班时还应注意保护场地清洁,以身作则。(4)搬运场地也出现了问题,有的队因场地搬运和更换新场地,会导致地面变滑,小车的部分参数需要更改,因此可以在搬运场地后给参赛队6,7个小时去调试,使机器人适应场地,此间还应注意保护场地,禁止踩踏。(5)今年比赛时话筒紧张,以后要注意。 然后,是比赛过程中遇到的一些问题。(1)此次比赛做得比较花哨,没有侧重参赛队的需求,而是更像鼓励性的比赛,现场的秩序比较混乱,比较拥挤,不受控制。下一次,
要将比赛做的更正式些。(2)比赛场地有点挤,观众大部分都尽可能的挤到靠近比赛场地的地方,导致现场的混乱,我们可以考虑换用更大的场地,同时布置成阶梯型,体育馆是比较合适的选择。(3)媒体的采访也是导致现场混乱的原因之一,建议抓好媒体签到的工作并将媒体采访集中到比赛结束后,这样也可以为媒体采访提供较好的平台。(4)谈及自主创新类比赛,普遍的问题是5分钟的介绍时间太紧,很多细节不能展示给评委,就此我们可以考虑下一次将自主创新的比赛做成全封闭的答辩式,方便参赛队和评委的沟通。(5)裁判和参赛队的沟通很重要,因为裁判放置机器人的方式和参赛队自己是否一样,将影响到比赛能否成功和最后成绩。
(6)鉴于裁判自己要熟悉比赛规则,和比赛中出现的不少机器人不能正常参赛和没有成绩的问题,我们考虑增加预赛,并将预赛成绩作为一部分计入最后成绩中,这样可以一举两得。在预赛结束后建议开一个小小的总结会,为正式比赛做准备。(7)灭火比赛中有人质疑比赛规则中的“赛前3分钟调试”,因此我们考虑下一次细化比赛规则时将这一条去掉。(8)由于部分参赛队怀疑工作人员取放机器人时对部分线路有所损坏,可建议他们为机器人增加外壳保护装置。
(9)比赛时可允许每个队有2个人进入场地,一个负责提示裁判如何控制机器人启动,一个人在旁边介绍自己队的设计。(10)由于灭火的蜡烛的位置有很大的可变性,裁判在
放置蜡烛时要严格按照比赛规则。(11)立项时要求每个队的机器人都要完工,包括程序。比赛后在收回立项的机器人时将他们的程序一起收上来,方便后人的学习。(12)此次比赛的视频制作不是科协自己的人做的,这展现了科协还缺少一些必要的技术人员,我们必须培养自己的人才,尽量减少去求助比别人。
总结经验,吸取教训,相信我们的比赛将在全体成员的努力下越办越好。
宋伟山