一 课程设计要求
二 控制系统结构与方框图
三 控制系统介绍
四 设计方案原理图
五 设计方案具体实践
六 结论与心得
一、 课程设计要求
使用labVIEW软件编程通过加入比例、微分、积分环节实现对单容水箱液位的控制,使其液位基本保持在设定值处,当有扰动时,系统可以自动调节,仍旧使液位保持在设定值处。
二、 控制系统结构与方框图
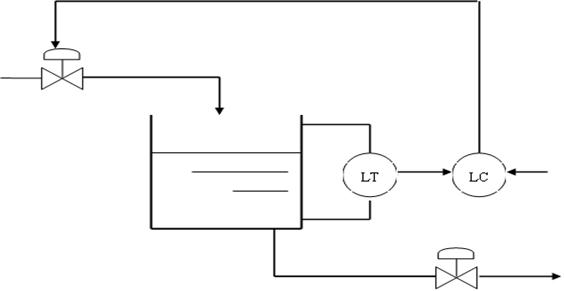
单容水箱液位控制系统结构图
该液位控制系统中,储水槽是被控对象,液位是被控变量,变送器LT将反映液位高低的信号送往液位控制器LC。控制器的输出信号送往执行器,改变控制阀开度使储水槽输出流量发生变化以维持液位稳定。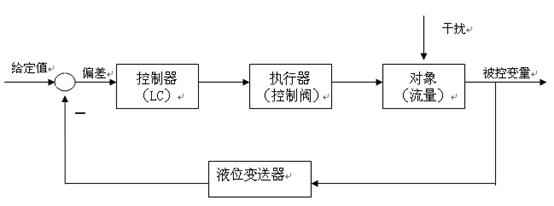
单容水箱液位控制系统方框图
三、 控制系统介绍
该液位控制系统,如下图所示 (LabVIEW前面板)
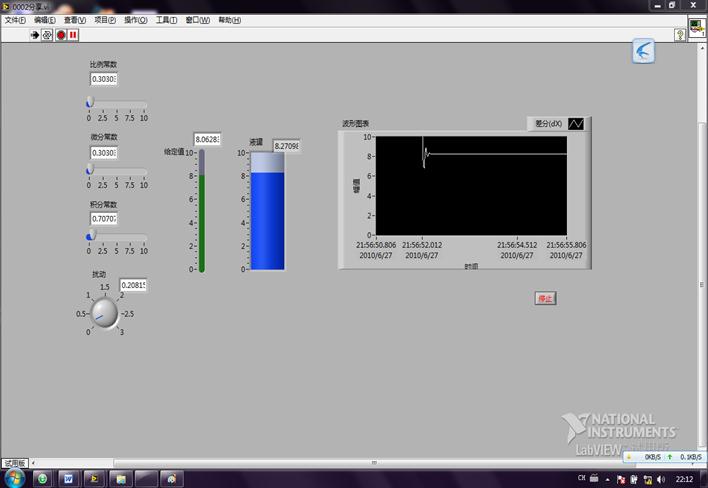
单容水箱、上位手动阀门、上位增压泵(家用增压泵,型号:UPA 15-900 160,格兰富水泵(上海)有限公司)、控制阀阀(厂商产品型号:060459R,德国宝德公司) 、下位增压泵、下位手动阀门
液位传感器为HM型压力传感器,它要测的当然是上位水箱的液位,测得值要传送给计算机,就需要有数采卡和必要的信号条理电路,计算机分析液位若是偏高(比期望值大),就通过DA转换,输出个较大的值给比例阀,让之开大点,让水流快点。水的液位也许基本稳定住了,但控制效果有好坏。比如期望值为30cm,有的控制使液位在25cm到35cm之间变化,而且液位在不停地上升和下降;有的控制使液位就在30cm的左右,上下只有0.1cm的波动。而这些,在硬件不可改变的情况下,是通过PID算来来实现。
四、 设计方案原理图
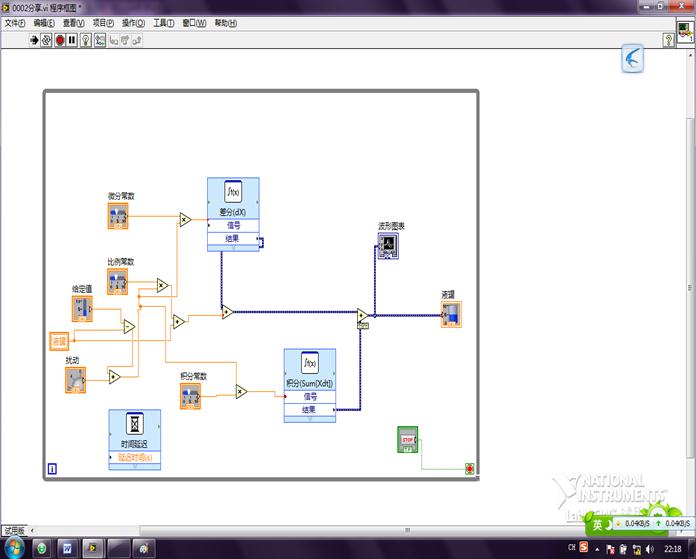 基于LabVIEW实现液位控制的图形化编程图
基于LabVIEW实现液位控制的图形化编程图
五、 设计方案具体实践
加入P控制时图像
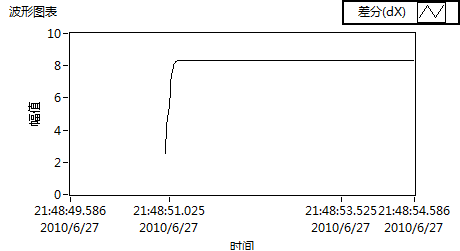
比例控制器的特点是:控制器的输出与偏差成比例,即控制阀门位置与偏差之间具有一一对应关系。当比例变化时,由图像可知,加入比例控制克服干扰,及时控制,缩短过渡时间。
加入PI控制时图像
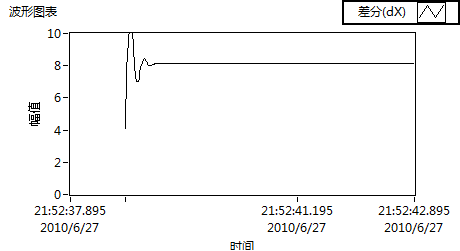
比例积分控制器的特点是:由于在比例控制的基础上加上积分作用,而积分作用的输出是与偏差的积分成比例,只要偏差存在,控制器的输出就会不断变化直至消除偏差为止。由图像可知,在过渡过程结束时可以实现无余差。
加入PID控制时图像

比例积分微分控制器的特点是:微分作用是控制器的输出与输入偏差的变化速度成比例,它对克服对象的之后有显著的效果。在比例的基础上加微分作用能提高稳定性,再加上积分作用可以消除余差。有图像可知,适当调整PID的三个参数,可以是控制系统获得较高的控制质量。
六、 结论与心得
通过不同的PID组合控制我们可以发现,结合使用三者的效果最快最稳定,最能实现对水箱液位的控制。
使用PID控制
(1)原理简单,应用方便,参数整定灵活。
(2)适用性强。可以广泛应用于电力、机械、化工、热工、冶金、轻工、建材、石油等行业。
(3)鲁棒性强。即其控制的质量对受控对象的变化不太敏感,这是它获广泛应用的最重要的一原因。因为在实际的受控对象,例如由于受外界的扰动时,尤其是外界负荷发生变化时,受控对象特性会发生很大变化,为得到良好的控制品质,必须经常改变控制器的参数,这在实际操作上是非常麻烦的;又如,由于环境的变化或设备的老化,受控对象模型的结构或参数均会发生一些不可知的变化,为保证控制质量,就应对控制器进行重新设计,这在有些过程中是不允许的。因此,如果控制器鲁棒性强,则就无须经常改变控制器的参数或结构。
目前,基于PID控制而发展起来的各类控制策略不下几十种,如经典的Ziegler-Nichols算法和它的精调算法、预测PID算法、最优PID算法、控制PID算法、增益裕量/相位裕量PID设计、极点配置PID算法、鲁棒PID等。
经过几天的忙碌和工作,已完成本次课程设计。在这次设计时,由于经验的匮乏,考虑问题还不是很详细,容易忽略一些细节问题。通过这次课程设计不仅让我更深一步了解了PID算法和PID控制技术,更重要的是还让我学会了,或者说是验证了做事一定要有条理,及对事物的总体把握,只有有了条理,做起事来才会得心应手。
第二篇:20xx级自动化课程设计
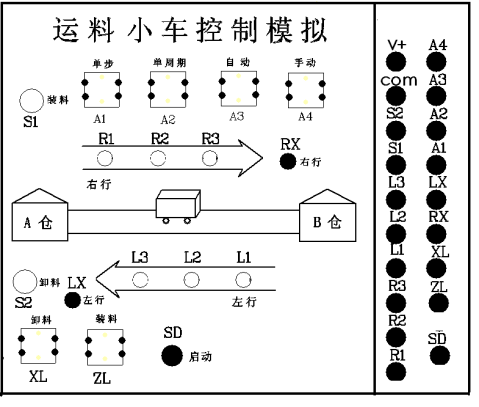
运料小车控制模拟
在运料小车单元完成本实验
一、 目的
用PLC构成运料小车控制系统,掌握多种方式控制的编程。
二、说明
系统启动后,选择手动方式(按下微动按钮A4),通过ZL、XL、RX、LX四个开关的状态决定小车的运行方式。装料开关ZL为ON,系统进入装料状态,灯S1亮,ZL为OFF,右行开关RX为ON,灯R1、R2、R3依次点亮,模拟小车右行,卸料开关XL为ON,小车进入卸料状态,XL为OFF,左行开关LX为ON,灯L1、L2、L3依次点亮,模拟小车左行。选择自动方式(按下微动按钮A3),系统进入装料->右行->卸料->装料->左行->卸料->装料循环状态。选择单周期方式(按下微动按钮A2),小车运行来回一次。选择单步方式,按一次微动按钮A1一次,小车运行一步。
三、面板图 :
1
十字路口交通灯控制(带倒计时显示)
在十字路口交通灯单元完成本实验
一、目的
熟练使用基本指令,根据控制要求,掌握PLC的编程方法和程序调试方法,了解使用PLC解决一个实际问题。
二、说明
信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始工作,且先南北红灯亮,东西绿灯亮,东西和南北的LED数码管由25秒开始倒计时,当启动开关断开时,所有信号灯都熄灭,LED数码管复位显示25;南北红灯亮维持25秒,在南北红灯亮的同时东西绿灯也亮,并维持20秒;东西和南北的LED数码管也开始由25秒开始倒计时,到20秒时,东西绿灯闪亮,闪亮3秒后熄灭。在东西绿灯熄灭时,东西黄灯亮,并维持2秒。到2秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮,东西和南北的LED数码管又由25秒开始倒计时。东西红灯亮维持30秒。南北绿灯亮维持20秒,然后闪亮3秒后熄灭。同时南北黄灯亮,维持2秒后熄灭,这时南北红灯亮,东西绿灯亮。周而复始
三、面板图:

2
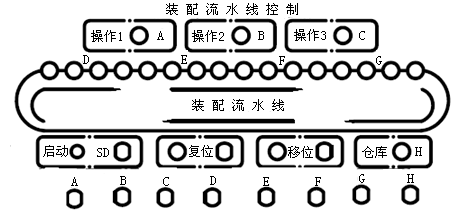
装配流水线的模拟控制
在装配流水线单元完成本实验
一、目的
了解移位寄存器在控制系统中的应用及针对位移寄存器指令的编程方法。
二、说明
在本实验中,传送带共有十六个工位。工件从1号位装入,依次经过2号位、3号位???16号工位。在这个过程中,工件分别在A(操作1)、B(操作2)、C (操作3)三个工位完成三种装配操作,经最后一个工位送入仓库。
按下启动开关SD ,程序按照D→A→E→B→F→C→G→H流水线顺序自动循环执行;在任意状态下选择复位按钮程序都返回到初始状态;选择移位按钮,每按动一次,工件运行一步 。
三、面板图 :
3
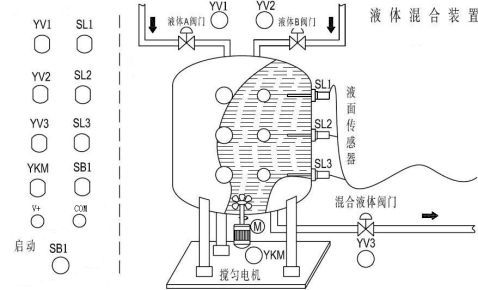
液体混合装置控制的模拟
在液体混合装置单元完成本实验
一、目的
熟练使用置位和复位等各条基本指令,通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试。
二、说明
由实验面板图可知:本装置为两种液体混合装置,SL1、SL2、SL3为液面传感器,液体A、B阀门与混合液阀门由电磁阀YV1、YV2、YV3控制,M为搅动电机,控制要求如下:按下启动按钮SB1,装置投入运行时,液体A、B阀门关闭,混合液阀门打开20秒将容器放空后关闭:液体A阀门打开,液体A流入容器。当液面到达SL2时,SL2接通,关闭液体A阀门,打开液体B阀门。液面到达SL1时,关闭液体B阀门,搅动电机开始搅动。搅动电机工作6秒后停止搅动,混合液体阀门打开,开始放出混合液体。当液面下降到SL3时,SL3由接通变为断开,再过2秒后,容器放空,混合液阀门关闭,开始下一周期。停止操作:在当前的混合液操作处理完毕后.按下停止按钮SB1,停止操作。
三、面板图:
4
机械手动作的模拟
在机械手单元完成本实验
一、目的
用数据移位指令来实现机械手动作的模拟
二、说明
下图为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。设备装有上、下限位开关和左、右限位开关,它的工作过程如图所示,有八个动作,即为:
原位下降夹紧上升右移
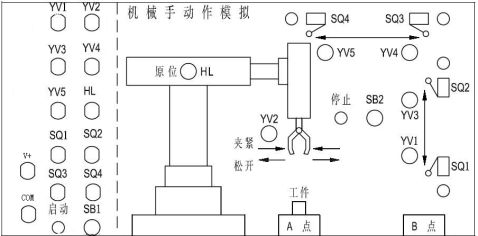
左移放松下降
三、面板图:
5
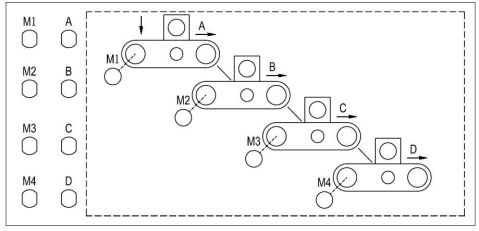
四节传送带的模拟
在四节传送带单元完成本实验
一、 目的
通过使用各基本指令,进一步熟练掌握PLC的编程和程序调试。
二、说明
有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下: 启动时先起动最末一条皮带机,经过1秒延时,再依次起动其它皮带机。 停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。 当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。例如M2故障,M1、M2立即停,经过1秒延时后,M3停,再过1秒,M4停。当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行1秒后停,而该皮带机以后的皮带机待料运完后才停止。例如,M3上有重物,M1、M2立即停,再过1秒,M4停。
三、面板图:
6
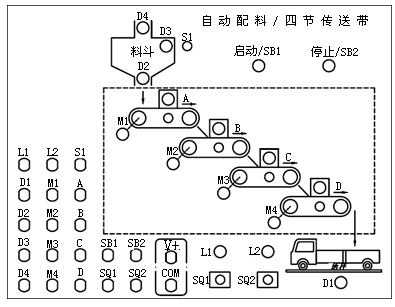
自动配料系统控制的模拟
在自动配料单元完成本实验
一、目的
(1)熟练掌握PLC的编程和程序调试。
(2)了解掌握现代工业中自动配料系统的工作过程和编程方法。
二、说明
系统启动后,配料装置能自动识别货车到位情况及对货车进行自动配料,当车装满时,配料系统能自动关闭。
(1)初始状态
系统启动后,红灯L2灭,绿灯L1亮,表明允许汽车开进装料。料斗出料口D2关闭,若料位传感器S1置为OFF(料斗中的物料不满),进料阀开启进料(D4亮)。当S1置为ON(料斗中的物料已满),则停止进料(D4灭)。电动机M1、M2、M3和M4均为OFF。
(2)装车控制
装车过程中,当汽车开进装车位置时,限位开关SQ1置为ON,红灯信号灯L2亮,绿灯L1灭;同时启动电机M4,经过1S后,再启动启动M3,再经2S后启动M2,再经过1S最后启动M1,再经过1S后才打开出料阀(D2亮),物料经料斗出料。
当车装满时,限位开关SQ2为ON,料斗关闭,1S后M1停止,M2在M1停止1S后停止,M3在M2停止1S后停止,M4在M3停止1S后最后停止。同时红灯L2灭,绿灯L1亮,表明汽车可以开走。
(3)停机控制
按下停止按钮SB2,自动配料装车的整个系统终止运行。
三、面板图:
7
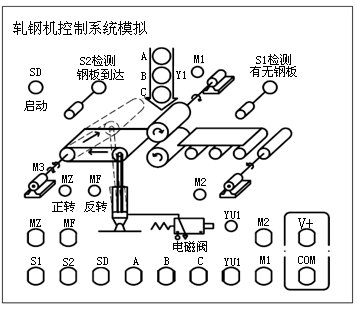
轧钢机控制系统模拟
在轧钢机单元完成本实验
一、目的
用PLC构成轧钢机控制系统,熟练掌握PLC的编程和程序调试方法。
二、 说明
当启动按钮SD接通,电机M1、M2运行,传送钢板,检测传送带上有无钢板的传感器S1的信号(即开关为ON),表示有钢板,电机M3正转(MZ灯亮);S1的信号消失(为OFF),检测传送带上钢板到位后的传感器S2有信号(为ON),表示钢板到位,电磁阀动作(YU1灯亮),电机M3反转(MF灯亮)。Y1给一向下压下量,S2信号消失,S1有信号,电机M3正转??重复上述过程。
Q0.1第一次接通,发光管A亮,表示有一向下压下量,第二次接通时,A、B亮,表示有两个向下压下量,第三次接通时,A、B、C亮,表示有三个向下压下量;在Q0.1第三次接通断开时,电磁阀YU1灯灭,“A、B、C”全灭,“M2”灯亮送走钢板,按下启动开关系统停止工作。
三、面板图:
8
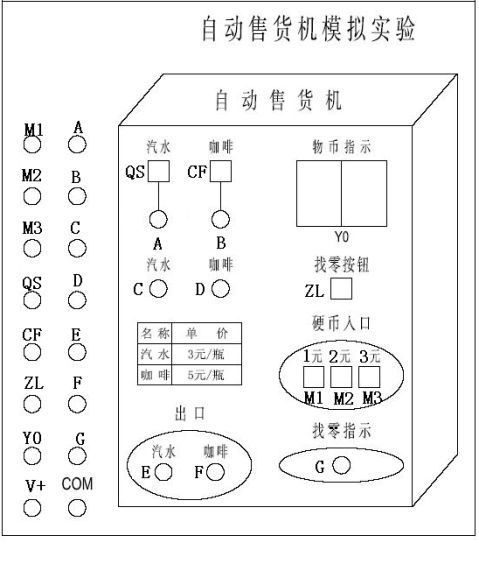
自动售货机的模拟控制
一、目的
了解并掌握可逆计数器CTUD在控制系统中的应用,灵活运用定时器TON使他实现脉冲的功能。
二、说明
M1、M2、M3三个复位按钮表示投入自动售货机的人民币面值,YO货币指示(例如:按下M1则Y0显示1),自动售货机里有汽水(3元/瓶)和咖啡(5元/瓶)两种饮料,当Y0所显示的值大于或等于这两种饮料的价格时,C或D发光二极管会点亮,表明可以购买饮料;按下汽水按钮或咖啡按钮表明购买饮料,此时A或B发光二极管会点亮, E或F 发光二极管会点亮,表明饮料已从售货机取出;按下ZL按钮表示找零,此时Y0清零,延时0.6S找零出口 G发光二极管点亮。
三、面板图:
9