�ṹ�Ż���������ڽṹ�����������ڸ�������ƿռ�ʵ������ʹ��Ҫ���Ҿ���������ܻ�
��ͳɱ��Ĺ��̽ṹ��Ƶļ���
�Ż���Ƶ���Ҫ��:��Ʊ���;Լ������;Ŀ�꺯��
��:����nά�ռ������s����ȡ��������x1��x2��������������߶�Ҳ����s����
������� =��x1+(1-��)x2 ��
����:�������f(x)������nά�ռ����s�ϣ����Ҷ�s�е���������x1��x2�����ⳣ
����,0.0<=��<=1.0,��f[��x1+(1- ��)x2]<=��f(x1)+(1- ��)f(x2),��f(x)��Ϊs�ϵ�����
�ϸ�����:��ʽС���ϸ����
�滮:�������������Ŀ�꺯�����������������ɵ���ѧ�滮����Ϊ�滮���⡣
����Ʒ�:�������̾���;Ч�ʸ�;ȱ���ϸ���ѧ����
�������ڿ����ˣ�K-T������:�蹹���������㷨;ͨ���Բ�ǿ
��ѧ�滮����:���ϸ����ѧ�������нϺõ�ͨ���ԣ�����Ч��Ҫ���ǡ�
�ṹ�Ż��������Ⲽ��
I. �����Ż�ģ�͡�������ʼ��Ʒ�����
II. �ṹ����(����Ԫ��
III.�Ż��������ԣ����顣������������������IV
IV. �����ȷ���
V. ����Ż����⣬�Ľṹģ�ͣ�����II��
�Ż������������������ѧ�滮��
����Ʒ��������Ż������ԭ�����Ż�����
ͬ��ʧЧ����Ƶ����ۣ�
{�ŵ㣺�����㣬�ر��Ƕ���Լ������n=mʱ������ʵ�ã��ʺ��ڹ�����ơ�
ȱ�㣺ֻ�ܴ���������ƣ���С����ƿռ䣬���ܱ�֤���Ž⣻��n < m �������⣻��n > mʱ��ȷ����Щ�ƻ�ģʽӦͬʱ�����Ƚ����ѡ�
�Ľ��� Ϊ���ֲ���ʽԼ�����治��ʽԼ����ȱ�ݣ������ɳ����Ӧ�i
�� i (X ) =�� i�� ip , 0 �ܦ� i ��1, i =1,2,......n
�������������ԭ�����Ż����⣬�Ļ���˼�룻�������ܵ�ÿ���˿���һ�ֿ���
���ƻ�ģʽ����ܿ���һ��Ԫ�������Եõ���Ӧ����
��Ӧ��������ȱ�㣺��ȫ����������©��������ƣ��м��һ���Dz�������ƣ��Թ���ʵ�ʲ�����ϣ���õ����е��м���Ƶ㡣
���η����������߲����п����Ե��������������һ��ն�����Ʊ��������ȵĽṹ��
��������Ʊ���ͬʱ����һ�������Σ�Ani =��A io}
���Ժ����������������Թ滮���滮��
��Ӧ���������ۣ�
{�ŵ㣺���������ڽ��ܣ������죨�ر��ʺϴ��ͽṹ�Ż��������ڴ����ʵ�ʹ��̽ṹ����Ӧ���������ܽӽ������Ž⣻����λ�ơ�Ƶ�ʵ�Լ��ʱ��Ӧ���ȷ���������Ӧ��Լ����Ҳ�����������������ʹ�ã�Ӧ���ȷ���Ҳͬ��������Ĥ��Ԫ�����������塢���ṹ�����ƹ�Ľ�����Ӧ���������߲���Ѱ����Ӧ����ƣ���Ӧ�����Ļ���˼��?��һ����������ԭ�����ϸ����ѧ�滮���ڽṹ�Ż��еõ��㷺��Ӧ�ú��ƹ㡣
ȱ��:��Ӧ������ܲ������Ž⣻��Ӧ���ȷ������ܲ����������������������볬��������йأ������ṹ�����٣������طֲ����صĽṹ���������ࣻ}
���߲������Ӧ����Ƶ�Ӧ���ȷ�����
K-T�������������壺�ڼ�ֵ�㣬Ŀ�꺯���ĸ��ݶ�Ӧ��Ϊ����Լ���ݶ�������������ϡ�
K-T�����������������������λ��Լ����������С����������ޣ�
1. ������ʼ���Ak���нṹ���������ʵ����������ص������ֲ�
2. ��������������Dn����������һ��ȡ����
3. ���㱻����Ʊ���������λ�ƹ��ף�Wp,ujp
4. ���㡰���š�����W*
5. ������������������ֲ�Ak ��
6. ��Ak��������ޱȽϣ������µ������������� ���µ�����������
����D����Dn�Ƚϣ��������ͬ�� Dn= D������3),�����������
K-T�������������������������λ��Լ����������С����������ޣ�
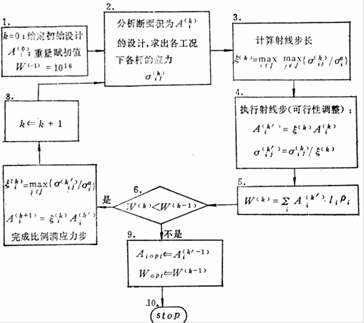
1. ������ʼ��ƣ�k=0
2. ���нṹ���������ʵ����������������ֲ�Si,Sjiv�����㣺
3. ����Aikֵ�͵���������������������Dn����������һ��ȡ����
4. ���ݵ�����ʽ�����µ�������Ʊ���ֵ
a) ���㱻����Ʊ���������λ�ƹ��ף�Wp,ujp
b) ���㡰���š�����W*,��k
c) ����������������ֲ�Aik+1 ������������ޱȽϣ������µ�����������
d) ��Aik+1����������������D����Dn�Ƚϣ��������ͬ�� Dn= D������a),�������5��
5. �Ƚ�|Aik+1-Aik|<��,����������������Aik+1��Ϊ��ʼ��Ʒ���2��
����ȱ�㣺 �ŵ㣺�����ٶȿ����������ģ��
ȱ�㣺�����㷨���ѹ���
������
���Ǵӽṹ��ѧԭ������������һЩ�����Ӷ�Ѱ���ý�����ʽ����Ľṹ��Ʋ���������ͨ��ֱ�۵ĵ�����������ṹ����Ԫ�Ľ������
�ص㣺������С��ͨ���Բ������������
��ѧ�滮���Ǵӽ⼫ֵ�������ѧԭ��������������ѧ�滮�еĸ��ַ��������һϵ����Ʋ��������Ž⡣��ֱ�����������ѧģ��
�ص㣺ͨ���Ժã��������������⣬��������
���Թ滮�������η� ���ι滮����ķ����
��Լ�������Թ滮����Լ�����Ż��㷨��
0���㷨��0.618���������η���Powell�������ܺͷ������㷨
һ���㷨�������½���(�ݶȷ����������ݶȷ������ַ������з�
�����㷨��ţ�ٷ�����Ľ�
Լ�������Թ滮�㷨��1��ת����������������
2��ֱ�ӷ�����1������Լ���Ż��㷨��Ӧ��2�����з���3�����ʸ����
3�����н��ƹ滮�㷨��SLP,SQP)
�����½����ļ��㲽�裺1. ѡ���ʼ��x(0)
2. �����f (x(k)), ��ȡ-��f(x(k))Ϊ̽������
3. ����(k),ʹ����ֵ������½���һά�����Ż���
4. �õ�k+1�ε����ı���ֵ
5.�ж���������������ͣ����������k=k+1,����2
�����½��������ۣ��Ӿֲ����������½�����Ŀ�꺯��ֵ�½����ķ���ȫ�ֿ�������������������Ϊ��������˵���·�����־�����������ٶȲ��������ġ�
���÷�Χ��ǰ�ڵ��������岽�裬�ӽ���С��ʱ����������
ţ�ٷ��ļ��㲽�裺1. ѡ���ʼ��x(0)��2. ���㨌f (x(k))��3. ����H-1k��4. ���е������㣻5.�ж���������������ͣ����������k=k+1,����2
ţ�ٷ����ص㣺
1������ֵ�����ŵ�ӽ�ʱ������
�죬���ǽ�Զʱ����һ����
2) H-1 �����ڣ��㷨�����У�
3) H-1 ���ڣ��������������ܱ�֤��
ɽ����
4) ���ڲ����̶�������f(x(k+1))>f(x(k))
5) ��Ҫ����H-1 ����������
�Ľ���
1) �Ȳ��������½���������ţ�ٷ���
2) ת�������½�������d(k)=-��f(x(k))
3) ���(d(k))T��f(x(k))>0, d(k)= - d(k)��
���(d(k))T ��f(x(k))=0, ת��������
������
4) ��������ţ�ٷ�
5����ţ�ٷ���
���ַ����������Ĺ�ͬ�ص���
1 ������, �ױ��
2 ��Ŀ�꺯����Լ������Ҫ��
3 ��һϵ����Լ���Ż�����, ��������
4 tk��������rk,���ϼ�С, ��ɺ�������ֵ�������.
�ⷣ��������
�ŵ�: (1)���ܴ�������ʽ�����ܴ�����ʽ (2)��ʼ��������ģ���Ҫ�����
ȱ��: (1)�м�㲻���� (2)�������
�ڷ���������
�ŵ�: �м�����
ȱ��: ��1�� ��ʼ��Ҫ����У��Ը���������������
��2��Ҫ���Ʋ����������ߵ���������
��3�����ܴ�����ʽԼ��
�Ŵ��㷨����ģ����Ȼѡ����Ȼ�Ŵ����̵�һ���������Ž�ķ�����
�����Ŵ��㷨����ɣ���1�����루������ʼ��Ⱥ�� ��2����Ӧ�Ⱥ���
��3���Ŵ����ӣ�ѡ���桢���죩 ��4�����в���
���в�������1��M �� ��Ⱥ��ģ ��2��T �� �Ŵ��������ֹ��������
��3��Pc �� ������� ��4��Pm �� �������
�ڶ�ƪ������������ѧ������е�ܽ�