目录
1. 目的与要求............................................................................................................. - 1 -
2. 实习内容................................................................................................................ - 1 -
3. 操作步骤................................................................................................................ - 1 -
3.1. 新建测区设置测区参数文件........................................................................... - 1 -
3.2. 模型生成....................................................................................................... - 3 -
3.3. 模型定向与生成核线影像.............................................................................. - 4 -
3.3.1. 模型内定向.......................................................................................... - 4 -
3.3.2. 模型相对定向...................................................................................... - 5 -
3.3.3. 模型绝对定向...................................................................................... - 6 -
3.3.4. 自定义最大作业区............................................................................... - 7 -
3.3.5. 单模型DEM的生成............................................................................. - 8 -
3.3.6. DOM数据制作..................................................................................... - 8 -
3.3.7. DLG数据制作...................................................................................... - 9 -
4. 实习体会.............................................................................................................. - 10 -
5. 附:VirtuoZo质量报告......................................................................................... - 11 -
《数字摄影测量学》
实习报告
学院:测绘科学与技术学院
班级: 测绘工程*****班
姓名: ********
学号: **********
日期: 20***年***月***日
1. 目的与要求
通过操作全数字摄影测量系统VirtuoZo,初步了解全数字摄影测量系统的基本功能、一般作业流程。可以利用该系统生产许多数字产品,如数字高程模型、数字正射影像、数字线画图、景观图等。
2. 实习内容
按照要求,完成操作,例如内定向、相对定向、绝对定向。数字高程模型的建立、正射影像以及数字线划图的生产等。
3. 操作步骤
本次实习以影像像对2_Hammer为原始材料,通过全数字摄影测量系统VirtuoZo实现测区DEM、DOM、DLG的生产。现就各个产品的生产过程作详细描述。
3.1. 新建测区设置测区参数文件
在VirtuoZo系统中,在用户输入影像之前需要用户自定义一个文件夹,用于新建测区和存放该测区所有参数文件及中间结果、成果等。
运行VirtuoZo系统,进入到系统系统主界面,如图3-1所示。

图 3-1
在主菜单中选择“设置”、“测区参数项”,屏幕显示“打开或创建一个测区”文件对话框,在对应位置输入测区名称后进入到参数设置界面,如图3-2所示。
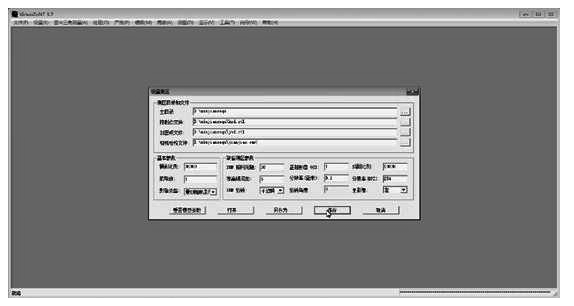
图 3-2
在参数设置界面设置好控制点、相机参数、加密点文件的路径。点击保存返回到系统主界面。
在设置中点击相机参数,屏幕弹出相机检校参数界面,由已知相机数据,在输入处点击鼠标左键,在VirtuoZo安装目录下找到对应的相机校检参数文件。点击确定按钮,将参数存盘。测区文件参数设置如图3-3所示。
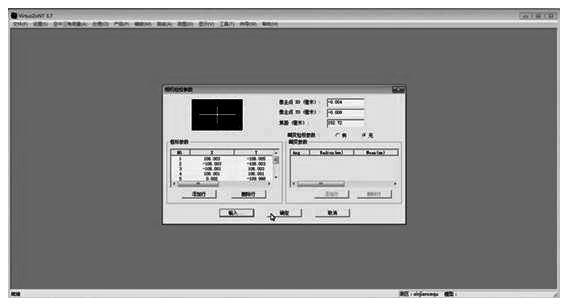
图 3-3
在文件中点击引入,输入影像,屏幕弹出输入影像界面,在界面上点击增加,弹出添加界面,在VirtuoZo安装目录下找到对应的影像文件156和157。点击确定按钮,将影像加载上来。
在输入影像界面将像素大小参数设为:0.045mm,影像类型设置为:测量。然后点击处理按钮,系统将会对像对进行相关处理。最后点击退出,返回到系统主界面。如图3-4所示。

图 3-4
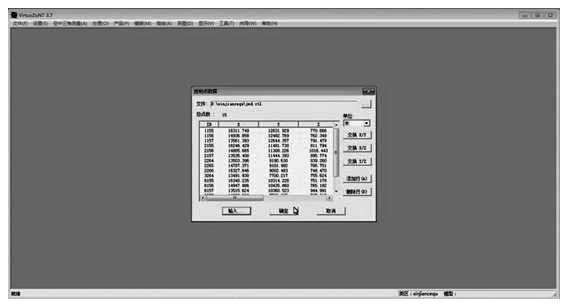
在设置中点击地面控制点,屏幕弹出地面控制点文件选择界面,由已知控制点文件,在输入处点击鼠标左键,在VirtuoZo安装目录下找到对应的控制点参数文件。点击确定按钮,将参数存盘。测区文件参数设置如图3-5所示。
图 3-5
3.2. 模型生成
在文件中单击打开或创建模型,新建一个模型,命名为156-157。如图3-6所示。

图 3-6
模型创建完成后,会弹出模型参数设置界面,在该界面我们需要设置左右影像。我们选择将156影像作为模型的右影像,将156影像作为模型的左影像,将核线参数设置为水平方向。如图3-7所示。点击保存,返回到系统主界面。
 图 3-7
图 3-7
3.3. 模型定向与生成核线影像
3.3.1. 模型内定向
(1)启动内定向模块。
(2)像片内定向
内定向中,左右像片要分别进行内定向。下图中,左边窗口的中心是按钮面板,每个方块按钮对应于一个框标。单击其中一个按钮,则右边微调窗口中将放大显示其对应的框标影像。左边窗口的四周是框标影像窗口,每个小窗口显示一个框标。如图3-8所示。

图 3-8
右边窗口的上边是IO参数显示/修改窗口,可在此微调框标坐标。上半部的参数显示窗口,用来显示各框标的像片坐标、残差、内定向变换矩阵和中误差。下半部显示当前框标的放大影像。
为使内定向的精度满足作业要求,应尽量使白色的十字丝对准框标的中心。这时,要使用到框标的放大影像。具体操作是通过方块按钮选择第一个框标,然后利用右边窗口中的按钮,进行微调,直到框标放大影像中的白色十字丝对准像机的框标中心。对其它框标采用同样的方法进行调整。并保存、退出,完成左右片的内定向。
3.3.2. 模型相对定向
像片的内定向完成后,就要进行相对定向。
(1)启动相对定向模块。
(2)自动相对定向
相对定向时,采用自动相对定向。程序自动进行相对定向,寻找左右影像上合适的同名点,自动相对定向完成后,所有找到的同名点均以红色的“+”分别显示在左右影像上。
(3)检查和调整同名点
在界面的定向结果窗中,显示相对定向的中误差等。拉动定向结果窗的滚动条可看到所有相对定向点的上下视差。若某点误差过大,可进行调整,或将该点删除或微调。
选中某对同名点时,下面的点位放大窗口会显示出该同名点在左右影像上的图像。如果点位没有对准相同的地面位置,可以通过点位放大窗口下的按钮进行调整。选中要微调的点(将光标置于定向结果窗口该点的误差行再击鼠标左键)后,分别选择界面右下方的左影像或右影像按钮,分别点击向上、向下、向左、向右按钮,使左、右影像的十字丝中心位于同一影像点上。如图3-9所示。

图 3-9
自动相对定向完成后,在定向结果窗口检查同名点的上下视差,若上下视差较大,就把该点删除。具体操作是用鼠标左键将该点选中,然后再用鼠标左键单击窗口中的删除点按钮,即可删除该点。
编辑完成后,在影像显示窗口中的任意位置单击鼠标右键,选择弹出的右键菜单中的保存,再选择退出。
至此,模型相对定向完成。
3.3.3. 模型绝对定向
绝对定向前,以手工的方式在当前立体模型的左右影像上准确地定位一定数量的控制点。打开hammerIndex.html文件,查看测区的控制点分布情况,在影像上点击控制点,会出现放大图像,是量测控制点的依据。
量测控制点是在相对定向的界面下进行的。在相对定向界面上按右键,在弹出的菜单上选“全局显示”,在相对定向的界面中出现整张的左/右影像。如下图所示,参照给出的控制点点位图,寻找相应的控制点,找到后在点位附近点击,系统会弹出一放大的影像的小窗口,在该小窗口中,将光标对准该控制点,单击鼠标左键,程序将自动匹配出左/右影像上
的同名点,也以一放大的影像的小窗口显示,同时有一个调整点位的对话框出现。如图3-10所示。
图 3-10
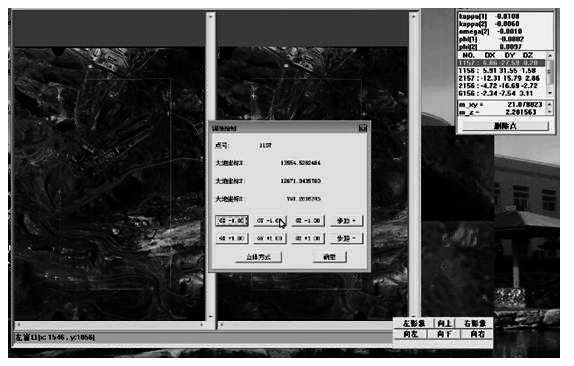
需对控制点的定位进行精确调整。具体方法是:①先选择左影像(或右影像),然后用鼠标左键点击加点对话框中的方向按钮,直到红色十字丝准确对准控制点时为止。再调整右影像(或左影像)。②输入控制点相应的点号,点击确定保存。③保存后还可通过界面右下方的按钮来调整坐标,用鼠标左键点击左影像按钮,然后不断地用鼠标左键点击向上、向下、向左或向右按钮,直到红色十字丝准确对准控制点时为止。
相对定向界面上已确定的控制点为黄色,当前点为青色。当找到3个点后,其它点点位用蓝色圆圈给出。
添加完所有的控制点后,就可以进行绝对定向了。
3.3.4. 自定义最大作业区
完成了模型的相对定向后就可以生成非水平核线影像,但生成水平核线影像需要先完成模型的绝对定向。对于近景影像和卫星影像,只能生成非水平核线。
如果由系统自动生成最大作业区,或在以前的作业中已经定义过作业范围,则不需进入相对定向界面,可直接在Virtuo-Zo主界面中单击处理菜单下的核线重采样的子菜单。
系统可自动定义最大作业区,在影像显示窗口中单击鼠标右键,在系统弹出的右键菜单中单击自动定义最大作业区菜单项,系统将自动定义最大作业区。如图3-11所示。
图 3-11
自动定义完作业区后,就可在影像显示窗口中点击鼠标右键,在右键菜单中点击保存、退出。然后直接在Virtuo-Zo主界面中单击处理菜单下的核线重采样的子菜单,程序自动生成核线影像。
3.3.5. 单模型DEM的生成
完成模型的影像匹配和匹配结果的编辑之后,就可生成数字高程模型DEM。
由于本次实习仅使用156-157一对影像,所以只能生成单模型DEM。当单模型DEM生成后,还要进行DEM编辑。
在Virtuo-Zo主界面中点击产品菜单下的DEM制作。选择Drape工具立体显示DEM。具体操作为:
1、设置显示方式
DEM的立体显示支持三种显示模式:正射影像、格网和伪彩色。
正射影像→格网显示DEM→伪彩色显示DEM→DEM制作完成。
2、浏览DEM为了更好地观测DEM,Drape提供了旋转和缩放功能。将光标置于影像中,按住鼠标左键并同时移动鼠标,可推远或拉近当前影像。将光标置于影像中,按住鼠标右键并同时移动鼠标,可对当前影像做旋转。
3.3.6. DOM数据制作
利用做好的DEM数据可进行DOM的数据制作。
DOM数据制作之前需要制作正射影像,点击Virtuo-Zo主界面下设置菜单下的正射影像参数。设置完正射影像的参数后,在Virtuo-Zo主界面中,用鼠标左键单击产品菜单下的生成正射影像菜单项,程序将会自动生成当前模型的正射影像。或用鼠标左键单击高级菜单下的生成正射影像制作菜单项,程序将会自动生成当前模型的正射影像。
单击正射影像制作后,显示以下对话框,设置DEM文件、像机参数、添加原始影像等,进行正射影像的自动生成。
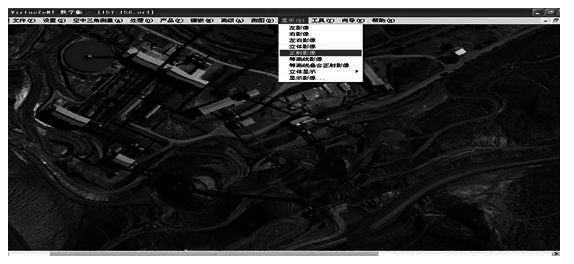
制作的DOM可在Virtuo-Zo主界面的显示菜单下,显示正射影像。如图3-12所示。
图 3-12
3.3.7. DLG数据制作
当制作出测区的DEM、DOM数据后,就可进行DLG的数据采集。其中DLG中的等高线可利用DEM数据生成的等高线数据。点击Virtuo-Zo主界面下的测图菜单下的IGS数字化测图子菜单,进入DLG数据采集界面。
1、新建矢量文件:进入数字化测图界面后,首先要新建一个矢量文件(*.xyz)。点击文件菜单下的新建xyz文件。
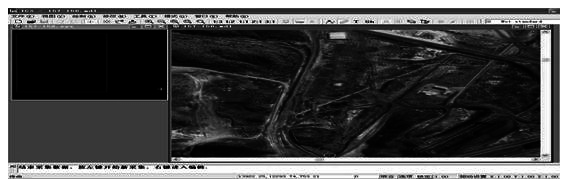
图 3-13
2、设置地图参数:新建好矢量文件后,需要按照像对位置设置地图参数。
3、装载立体模型:单击数字测图界面的装载菜单项的立体模型子菜单,系统列出选择立体模型对话框。选择要打开的立体模型,单击对话框中的打开按钮,程序将立体模型打开。左边窗口为矢量窗口,右面窗口为立体模型窗口。如图3-13所示。
4、立体测图:在立体模型上进行数据采集时,影像应放大一点。测图时,根据个人习惯自定义立体鼠标的快捷键。如果采用电脑自带鼠标测图时需要注意鼠标三键的功能。左键:在量测过程中,用于确认点位。中键:在量测过程中,用于调整测标的高程。右键:在量测操作过程中,用于结束当前操作。
立体测图工作主要包括地物量测、地物编辑和文字注记等。在数字测图系统中,地物量测就是对目标进行数据采集,获得目标的三维坐标 X、Y、Z 的过程。在 IGS 中,系统将实时记录测图的结果,并将之保存在测图文件*.xyz中。
量测地物的基本步骤为:输入或选择地物特征码;进入量测状态;根据需要选择线型或辅助测图功能;根据需要启动或关闭地物咬合功能;对地物进行量测。

每种地物都有各自的标准测图符号,而每种测图符号都对应一个地物特征码。数字化量测地物时,首先要输入待测地物的特征码。单击图标Sh(符号表),在弹出的对话框中选择地物符号。如图3-14所示。
图 3-14
按下“符号化地物绘制”图标,进入量测状态进行地物量测状态。利用鼠标的三键进行地物的采集,立体影像和矢量窗口上均有采集的地物矢量图形。地物量测时,需参照外业调绘片进行数据采集。等高线的绘制可采用DEM生成的等高线数据,点击文件菜单下引入子菜单下的等高线,即可将DEM生成的等高线导入到矢量窗口中,与地物合成,制作出DLG的采集数据。如图3-15所示。
4. 实习体会
全数字摄影测量VirtuoZo系统是由武汉大学开发的一款经典软件,通过本次实习上机操作,我对其功能有了初步的了解,同时有一下几方面的体会与建议。
通过实习我认识到摄影测量学是通过获取立体影像来研究和确定被摄物体的形状、大小、空间位置、性质和相互关系的一门信息科学与技术。全数字摄影测量教学实习是“全数字摄影测量学”课程教学的重要组成部分。 通过实习将课堂理论与实践相结合,使学生深入掌握摄影测量学基本概念和原理,加强摄影测量学的基本技能训练, 培养学生分析问题和解决问题的实际动手能力。

图 3-15
通过实际使 用数字摄影测量工作站,了解数字摄影测量的内定向、相对定向、绝对定向、测图过程及方法;编制数字影像分割程序,使学生掌握数字摄影测量基本方法与实现,为今后从事有关应 用遥感立体影像和数字摄影测量打下坚实基础.我们本次实习的是数字摄影测量工作站的操作,数字摄影测量系统是基于数字影像与摄影测量的基本原理,应用计算机技术、数字影像处理、影像匹配、模式识别等多学科的理论与方法, 提取所摄对象用数字方式表达的几何与物理信息, 从而获得各种形式的数字产品 和目视化产品。
数字摄影测量系统是摄影测量自动化的必然产物。 数字摄影测量系统为用户 提供了从自动空中三角测量到测绘地形图的全套整体作业流程解决方案, 大大改变了我国传 统的测绘模式。VirtuoZo 大部分的操作不需要人工干预,可以批处理地自动进行,用户也可 以根据具体情况灵活选择作业方式,提高了行业的生产效率。它不仅是制作各种比例尺的 4D 测绘产品的强有力的工具,也为虚拟现实和 GIS 提供了基础数据,是 3S 集成、三维景 观和城市建模等最强有力的操作平台。
5. 附:VirtuoZo质量报告
起点坐标 [行数 X 列数]: 2559.081 2559.961
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.011 My = 0.005
残差: 点号 dx dy
1 0.006 -0.005
2 -0.007 0.007
3 -0.011 -0.002
4 0.001 -0.001
5 -0.013 0.002
6 0.026 -0.009
7 -0.003 0.008
8 0.001 0.001
右原始影像 ( D:\1\Images\01-156_50mic.vz ):
起点坐标 [行数 X 列数]: 2528.954 2563.034
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.002 My = 0.012
残差: 点号 dx dy
1 -0.001 0.000
2 -0.000 0.011
3 -0.003 -0.003
4 0.001 -0.003
5 0.002 -0.023
6 0.001 0.008
7 0.003 -0.006
8 -0.002 0.018
------------------------------------------------------------------
相对定向信息: (D:\1\157-156)
------------------------------------------------------------------
相对定向信息:
左旋转矩阵:
0.99994397 0.01061600 -0.00007900
-0.01061600 0.99994397 -0.00000000
0.00007900 0.00000100 1.00000000
右旋转矩阵:
0.99993700 0.00566700 -0.00967300
-0.00565900 0.99998403 0.00083800
0.00967800 -0.00078400 0.99995297
右片旋转角 (rad):
Phi = 0.00007900
Omiga = 0.00000000
Kappa = -0.01061600
左片旋转角 (rad):
Phi = 0.00967400
Omiga = -0.00083800
Kappa = -0.00565900
残差: 点号 dq
1 -0.005000
2 0.005000
3 -0.000000
4 0.001000
5 0.004000
6 0.004000
7 0.000000
8 -0.003000
9 -0.000000
10 0.004000
11 0.001000
12 -0.000000
13 0.001000
14 0.001000
15 0.004000
16 -0.006000
17 0.003000
18 -0.002000
19 -0.004000
20 -0.000000
21 0.000000
22 0.001000
23 0.002000
24 0.002000
25 -0.002000
26 0.006000
27 -0.004000
28 0.002000
29 0.001000
30 -0.001000
31 -0.000000
32 -0.006000
33 -0.001000
34 0.003000
35 0.004000
36 -0.005000
37 0.002000
38 0.004000
39 -0.002000
40 0.003000
41 -0.002000
42 0.002000
43 -0.001000
44 0.001000
45 0.005000
46 -0.006000
47 0.002000
48 0.002000
49 -0.002000
50 0.005000
51 0.002000
52 -0.001000
53 0.001000
54 -0.002000
55 -0.001000
56 -0.003000
57 -0.006000
58 0.001000
59 -0.000000
60 -0.007000
61 -0.005000
62 0.002000
63 0.004000
64 -0.002000
65 -0.002000
66 -0.001000
67 0.003000
68 0.003000
69 -0.001000
70 0.002000
71 -0.003000
72 0.002000
73 -0.003000
74 -0.004000
75 -0.005000
76 -0.006000
77 -0.004000
78 -0.000000
79 0.006000
80 -0.002000
81 -0.004000
82 0.004000
83 0.001000
84 -0.001000
85 0.003000
86 -0.005000
87 -0.003000
88 -0.001000
89 0.002000
90 0.004000
91 0.005000
92 -0.007000
93 0.003000
94 -0.004000
95 -0.005000
96 0.004000
97 0.001000
98 -0.001000
99 -0.004000
100 0.000000
101 0.003000
102 -0.006000
103 -0.006000
104 -0.004000
105 0.002000
106 -0.004000
107 -0.003000
108 -0.004000
109 0.003000
110 0.006000
111 0.002000
112 -0.002000
113 -0.002000
114 0.001000
115 0.000000
116 0.004000
117 0.006000
118 0.002000
119 0.006000
120 0.004000
121 0.004000
122 0.002000
123 -0.002000
124 0.003000
125 0.005000
126 -0.006000
127 -0.007000
128 0.005000
129 -0.000000
130 -0.002000
131 -0.005000
132 -0.007000
133 -0.002000
134 -0.000000
135 -0.004000
136 -0.001000
137 0.001000
138 -0.003000
139 0.002000
140 -0.002000
141 -0.007000
142 0.004000
143 -0.005000
144 0.001000
145 -0.001000
146 0.004000
147 0.000000
148 0.002000
149 -0.005000
150 0.004000
151 -0.003000
152 0.002000
153 0.000000
154 0.005000
155 0.005000
156 0.000000
157 0.001000
158 -0.004000
159 0.001000
160 -0.000000
161 -0.005000
162 -0.000000
163 0.002000
164 0.004000
165 0.005000
166 -0.006000
167 -0.002000
168 0.005000
169 0.003000
170 -0.006000
171 0.004000
172 -0.001000
173 -0.003000
174 0.003000
175 0.000000
176 -0.004000
177 -0.004000
178 0.006000
179 0.001000
180 -0.002000
181 -0.003000
182 -0.001000
183 0.004000
184 -0.004000
185 -0.003000
186 -0.005000
187 -0.006000
188 -0.001000
189 -0.001000
190 0.003000
191 -0.003000
192 -0.004000
193 0.003000
194 0.001000
195 -0.000000
196 -0.003000
197 -0.005000
198 0.005000
199 0.006000
200 -0.002000
1157 0.053000
1156 -0.016000
2156 -0.026000
6157 0.037000
2157 -0.004000
RMS: Mq = 0.006000
------------------------------------------------------------------
绝对定向信息: (D:\1\157-156)
------------------------------------------------------------------
绝对定向信息:
左旋转矩阵:
0.99981833 0.01633384 0.00982216
-0.01635289 0.99986452 0.00186275
-0.00979040 -0.00202303 0.99995005
右旋转矩阵:
0.99993527 0.01137789 0.00023225
-0.01137849 0.99993145 0.00275617
-0.00020088 -0.00275863 0.99999619
左片摄站坐标:
Xs = 13556.032 Ys = 11541.992 Zs = 3244.534
右片摄站坐标:
Xs = 14921.135 Ys = 11534.159 Zs = 3231.032
残差:
1157 -0.338766 0.883808 0.158380
1156 -0.268120 -0.596858 0.519359
2156 0.317247 -0.436642 -0.426866
6157 0.629945 0.394548 0.768798
2157 -0.340307 -0.244855 -1.019671
RMS: mx = 0.399984 my = 0.555632
mxy = 0.684627 mz = 0.649278
------------------------------------------------------------------
内定向信息: (D:\1\157-156)
------------------------------------------------------------------
左原始影像 ( D:\1\Images\01-157_50mic.vz ):
起点坐标 [行数 X 列数]: 2559.081 2559.961
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.011 My = 0.005
残差: 点号 dx dy
1 0.006 -0.005
2 -0.007 0.007
3 -0.011 -0.002
4 0.001 -0.001
5 -0.013 0.002
6 0.026 -0.009
7 -0.003 0.008
8 0.001 0.001
右原始影像 ( D:\1\Images\01-156_50mic.vz ):
起点坐标 [行数 X 列数]: 2528.954 2563.034
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.002 My = 0.012
残差: 点号 dx dy
1 -0.001 0.000
2 -0.000 0.011
3 -0.003 -0.003
4 0.001 -0.003
5 0.002 -0.023
6 0.001 0.008
7 0.003 -0.006
8 -0.002 0.018
------------------------------------------------------------------
相对定向信息: (D:\1\157-156)
------------------------------------------------------------------
相对定向信息:
左旋转矩阵:
0.99994397 0.01061600 -0.00007900
-0.01061600 0.99994397 -0.00000000
0.00007900 0.00000100 1.00000000
右旋转矩阵:
0.99993700 0.00566700 -0.00967300
-0.00565900 0.99998403 0.00083800
0.00967800 -0.00078400 0.99995297
右片旋转角 (rad):
Phi = 0.00007900
Omiga = 0.00000000
Kappa = -0.01061600
左片旋转角 (rad):
Phi = 0.00967400
Omiga = -0.00083800
Kappa = -0.00565900
残差: 点号 dq
1 -0.005000
2 0.005000
3 -0.000000
4 0.001000
5 0.004000
6 0.004000
7 0.000000
8 -0.003000
9 -0.000000
10 0.004000
11 0.001000
12 -0.000000
13 0.001000
14 0.001000
15 0.004000
16 -0.006000
17 0.003000
18 -0.002000
19 -0.004000
20 -0.000000
21 0.000000
22 0.001000
23 0.002000
24 0.002000
25 -0.002000
26 0.006000
27 -0.004000
28 0.002000
29 0.001000
30 -0.001000
31 -0.000000
32 -0.006000
33 -0.001000
34 0.003000
35 0.004000
36 -0.005000
37 0.002000
38 0.004000
39 -0.002000
40 0.003000
41 -0.002000
42 0.002000
43 -0.001000
44 0.001000
45 0.005000
46 -0.006000
47 0.002000
48 0.002000
49 -0.002000
50 0.005000
51 0.002000
52 -0.001000
53 0.001000
54 -0.002000
55 -0.001000
56 -0.003000
57 -0.006000
58 0.001000
59 -0.000000
60 -0.007000
61 -0.005000
62 0.002000
63 0.004000
64 -0.002000
65 -0.002000
66 -0.001000
67 0.003000
68 0.003000
69 -0.001000
70 0.002000
71 -0.003000
72 0.002000
73 -0.003000
74 -0.004000
75 -0.005000
76 -0.006000
77 -0.004000
78 -0.000000
79 0.006000
80 -0.002000
81 -0.004000
82 0.004000
83 0.001000
84 -0.001000
85 0.003000
86 -0.005000
87 -0.003000
88 -0.001000
89 0.002000
90 0.004000
91 0.005000
92 -0.007000
93 0.003000
94 -0.004000
95 -0.005000
96 0.004000
97 0.001000
98 -0.001000
99 -0.004000
100 0.000000
101 0.003000
102 -0.006000
103 -0.006000
104 -0.004000
105 0.002000
106 -0.004000
107 -0.003000
108 -0.004000
109 0.003000
110 0.006000
111 0.002000
112 -0.002000
113 -0.002000
114 0.001000
115 0.000000
116 0.004000
117 0.006000
118 0.002000
119 0.006000
120 0.004000
121 0.004000
122 0.002000
123 -0.002000
124 0.003000
125 0.005000
126 -0.006000
127 -0.007000
128 0.005000
129 -0.000000
130 -0.002000
131 -0.005000
132 -0.007000
133 -0.002000
134 -0.000000
135 -0.004000
136 -0.001000
137 0.001000
138 -0.003000
139 0.002000
140 -0.002000
141 -0.007000
142 0.004000
143 -0.005000
144 0.001000
145 -0.001000
146 0.004000
147 0.000000
148 0.002000
149 -0.005000
150 0.004000
151 -0.003000
152 0.002000
153 0.000000
154 0.005000
155 0.005000
156 0.000000
157 0.001000
158 -0.004000
159 0.001000
160 -0.000000
161 -0.005000
162 -0.000000
163 0.002000
164 0.004000
165 0.005000
166 -0.006000
167 -0.002000
168 0.005000
169 0.003000
170 -0.006000
171 0.004000
172 -0.001000
173 -0.003000
174 0.003000
175 0.000000
176 -0.004000
177 -0.004000
178 0.006000
179 0.001000
180 -0.002000
181 -0.003000
182 -0.001000
183 0.004000
184 -0.004000
185 -0.003000
186 -0.005000
187 -0.006000
188 -0.001000
189 -0.001000
190 0.003000
191 -0.003000
192 -0.004000
193 0.003000
194 0.001000
195 -0.000000
196 -0.003000
197 -0.005000
198 0.005000
199 0.006000
200 -0.002000
1157 0.053000
1156 -0.016000
2156 -0.026000
6157 0.037000
2157 -0.004000
RMS: Mq = 0.006000
------------------------------------------------------------------
绝对定向信息: (D:\1\157-156)
------------------------------------------------------------------
绝对定向信息:
左旋转矩阵:
0.99981833 0.01633384 0.00982216
-0.01635289 0.99986452 0.00186275
-0.00979040 -0.00202303 0.99995005
右旋转矩阵:
0.99993527 0.01137789 0.00023225
-0.01137849 0.99993145 0.00275617
-0.00020088 -0.00275863 0.99999619
左片摄站坐标:
Xs = 13556.032 Ys = 11541.992 Zs = 3244.534
右片摄站坐标:
Xs = 14921.135 Ys = 11534.159 Zs = 3231.032
残差:
1157 -0.338766 0.883808 0.158380
1156 -0.268120 -0.596858 0.519359
2156 0.317247 -0.436642 -0.426866
6157 0.629945 0.394548 0.768798
2157 -0.340307 -0.244855 -1.019671
RMS: mx = 0.399984 my = 0.555632
mxy = 0.684627 mz = 0.649278
------------------------------------------------------------------
内定向信息: (D:\1\157-156)
------------------------------------------------------------------
左原始影像 ( D:\1\Images\01-157_50mic.vz ):
起点坐标 [行数 X 列数]: 2559.081 2559.961
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.011 My = 0.005
残差: 点号 dx dy
1 0.006 -0.005
2 -0.007 0.007
3 -0.011 -0.002
4 0.001 -0.001
5 -0.013 0.002
6 0.026 -0.009
7 -0.003 0.008
8 0.001 0.001
右原始影像 ( D:\1\Images\01-156_50mic.vz ):
起点坐标 [行数 X 列数]: 2528.954 2563.034
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.002 My = 0.012
残差: 点号 dx dy
1 -0.001 0.000
2 -0.000 0.011
3 -0.003 -0.003
4 0.001 -0.003
5 0.002 -0.023
6 0.001 0.008
7 0.003 -0.006
8 -0.002 0.018
------------------------------------------------------------------
相对定向信息: (D:\1\157-156)
------------------------------------------------------------------
相对定向信息:
左旋转矩阵:
0.99994397 0.01061600 -0.00007900
-0.01061600 0.99994397 -0.00000000
0.00007900 0.00000100 1.00000000
右旋转矩阵:
0.99993700 0.00566700 -0.00967300
-0.00565900 0.99998403 0.00083800
0.00967800 -0.00078400 0.99995297
右片旋转角 (rad):
Phi = 0.00007900
Omiga = 0.00000000
Kappa = -0.01061600
左片旋转角 (rad):
Phi = 0.00967400
Omiga = -0.00083800
Kappa = -0.00565900
残差: 点号 dq
1 -0.005000
2 0.005000
3 -0.000000
4 0.001000
5 0.004000
6 0.004000
7 0.000000
8 -0.003000
9 -0.000000
10 0.004000
11 0.001000
12 -0.000000
13 0.001000
14 0.001000
15 0.004000
16 -0.006000
17 0.003000
18 -0.002000
19 -0.004000
20 -0.000000
21 0.000000
22 0.001000
23 0.002000
24 0.002000
25 -0.002000
26 0.006000
27 -0.004000
28 0.002000
29 0.001000
30 -0.001000
31 -0.000000
32 -0.006000
33 -0.001000
34 0.003000
35 0.004000
36 -0.005000
37 0.002000
38 0.004000
39 -0.002000
40 0.003000
41 -0.002000
42 0.002000
43 -0.001000
44 0.001000
45 0.005000
46 -0.006000
47 0.002000
48 0.002000
49 -0.002000
50 0.005000
51 0.002000
52 -0.001000
53 0.001000
54 -0.002000
55 -0.001000
56 -0.003000
57 -0.006000
58 0.001000
59 -0.000000
60 -0.007000
61 -0.005000
62 0.002000
63 0.004000
64 -0.002000
65 -0.002000
66 -0.001000
67 0.003000
68 0.003000
69 -0.001000
70 0.002000
71 -0.003000
72 0.002000
73 -0.003000
74 -0.004000
75 -0.005000
76 -0.006000
77 -0.004000
78 -0.000000
79 0.006000
80 -0.002000
81 -0.004000
82 0.004000
83 0.001000
84 -0.001000
85 0.003000
86 -0.005000
87 -0.003000
88 -0.001000
89 0.002000
90 0.004000
91 0.005000
92 -0.007000
93 0.003000
94 -0.004000
95 -0.005000
96 0.004000
97 0.001000
98 -0.001000
99 -0.004000
100 0.000000
101 0.003000
102 -0.006000
103 -0.006000
104 -0.004000
105 0.002000
106 -0.004000
107 -0.003000
108 -0.004000
109 0.003000
110 0.006000
111 0.002000
112 -0.002000
113 -0.002000
114 0.001000
115 0.000000
116 0.004000
117 0.006000
118 0.002000
119 0.006000
120 0.004000
121 0.004000
122 0.002000
123 -0.002000
124 0.003000
125 0.005000
126 -0.006000
127 -0.007000
128 0.005000
129 -0.000000
130 -0.002000
131 -0.005000
132 -0.007000
133 -0.002000
134 -0.000000
135 -0.004000
136 -0.001000
137 0.001000
138 -0.003000
139 0.002000
140 -0.002000
141 -0.007000
142 0.004000
143 -0.005000
144 0.001000
145 -0.001000
146 0.004000
147 0.000000
148 0.002000
149 -0.005000
150 0.004000
151 -0.003000
152 0.002000
153 0.000000
154 0.005000
155 0.005000
156 0.000000
157 0.001000
158 -0.004000
159 0.001000
160 -0.000000
161 -0.005000
162 -0.000000
163 0.002000
164 0.004000
165 0.005000
166 -0.006000
167 -0.002000
168 0.005000
169 0.003000
170 -0.006000
171 0.004000
172 -0.001000
173 -0.003000
174 0.003000
175 0.000000
176 -0.004000
177 -0.004000
178 0.006000
179 0.001000
180 -0.002000
181 -0.003000
182 -0.001000
183 0.004000
184 -0.004000
185 -0.003000
186 -0.005000
187 -0.006000
188 -0.001000
189 -0.001000
190 0.003000
191 -0.003000
192 -0.004000
193 0.003000
194 0.001000
195 -0.000000
196 -0.003000
197 -0.005000
198 0.005000
199 0.006000
200 -0.002000
1157 0.053000
1156 -0.016000
2156 -0.026000
6157 0.037000
2157 -0.004000
RMS: Mq = 0.006000
------------------------------------------------------------------
绝对定向信息: (D:\1\157-156)
------------------------------------------------------------------
绝对定向信息:
左旋转矩阵:
0.99981833 0.01633384 0.00982216
-0.01635289 0.99986452 0.00186275
-0.00979040 -0.00202303 0.99995005
右旋转矩阵:
0.99993527 0.01137789 0.00023225
-0.01137849 0.99993145 0.00275617
-0.00020088 -0.00275863 0.99999619
左片摄站坐标:
Xs = 13556.032 Ys = 11541.992 Zs = 3244.534
右片摄站坐标:
Xs = 14921.135 Ys = 11534.159 Zs = 3231.032
残差:
1157 -0.338766 0.883808 0.158380
1156 -0.268120 -0.596858 0.519359
2156 0.317247 -0.436642 -0.426866
6157 0.629945 0.394548 0.768798
2157 -0.340307 -0.244855 -1.019671
RMS: mx = 0.399984 my = 0.555632
mxy = 0.684627 mz = 0.649278
------------------------------------------------------------------
影像匹配信息: (D:\1\157-156)
------------------------------------------------------------------
__________________ Initial parameters ______________________
left image: rows =4554 columns =2574
right image: rows =4554 columns =2574
Match window width = 11
Match window length = 11
Searching range = 1
Match grid X_interval = 11
Match grid Y_interval = 11
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 3
MATCH_AREAS == 33 X 19
____________________________________________________________
627 : 0 0.0 %
627 : 479 76.4 %
627 : 551 87.9 %
627 : 580 92.5 %
627 : 584 93.1 %
627 : 588 93.8 %
627 : 592 94.4 %
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 2
MATCH_AREAS == 101 X 57
____________________________________________________________
5757 : 0 0.0 %
5757 : 4599 79.9 %
5757 : 5059 87.9 %
5757 : 5252 91.2 %
5757 : 5329 92.6 %
5757 : 5353 93.0 %
5757 : 5384 93.5 %
5757 : 5394 93.7 %
5757 : 5412 94.0 %
5757 : 5425 94.2 %
5757 : 5430 94.3 %
5757 : 5435 94.4 %
5757 : 5439 94.5 %
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 1
MATCH_AREAS == 303 X 171
____________________________________________________________
51813 : 0 0.0 %
51813 : 40030 77.3 %
51813 : 44771 86.4 %
51813 : 46187 89.1 %
51813 : 47022 90.8 %
51813 : 47408 91.5 %
51813 : 47710 92.1 %
51813 : 47917 92.5 %
51813 : 48134 92.9 %
51813 : 48250 93.1 %
51813 : 48356 93.3 %
51813 : 48431 93.5 %
51813 : 48503 93.6 %
51813 : 48565 93.7 %
51813 : 48626 93.8 %
51813 : 48655 93.9 %
51813 : 48686 94.0 %
51813 : 48711 94.0 %
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 0
MATCH_AREAS == 414 X 234
____________________________________________________________
96876 : 0 0.0 %
96876 : 70104 72.4 %
96876 : 76978 79.5 %
96876 : 79348 81.9 %
96876 : 80999 83.6 %
96876 : 81926 84.6 %
96876 : 82751 85.4 %
96876 : 83569 86.3 %
96876 : 84221 86.9 %
96876 : 84606 87.3 %
96876 : 84908 87.6 %
96876 : 85126 87.9 %
96876 : 85338 88.1 %
96876 : 85524 88.3 %
96876 : 85677 88.4 %
96876 : 85776 88.5 %
96876 : 85877 88.6 %
96876 : 85953 88.7 %
96876 : 86011 88.8 %
96876 : 86068 88.8 %
------------------------------------------------------------------
DEM 检查点中误差:
------------------------------------------------------------------
DEM 文件: D:\1\157-156\product\157-156.dem
检查点(控制点)文件: D:\1\jmd.ctl
------------------------------------------------------------------
点号 X Y Z dZ
1156 14936.858 12482.769 762.349 0.142
1157 13561.393 12644.357 791.479 -0.007
2156 14885.665 11308.226 1016.443 0.746
2157 13535.400 11444.393 895.774 1.057
6156 14947.986 10435.860 765.182 1.141
6157 13515.624 10360.523 944.991 -0.371
点数 = 6
均值 = 0.5
绝对均值 = 0.6
均方根 = 0.7
点号 百分比
dZ <= 1.0 : 4 66.7
1.0 < dZ <= 2.0 : 2 33.3
2.0 < dZ <= 3.0 : 0 0.0
3.0 < dZ <= 4.0 : 0 0.0
4.0 < dZ <= 5.0 : 0 0.0
5.0 < dZ <= 6.0 : 0 0.0
6.0 < dZ <= 10.0 : 0 0.0
10.0 < dZ <= 20.0 : 0 0.0
20.0 < dZ <= 100.0 : 0 0.0
------------------------------------------------------------------
VirtuoZo 影像文件信息 (正射影像):
------------------------------------------------------------------
影像文件名: D:\1\157-156\product\157-156.orl
行列数 [行数X列数]: 3231 X 1661
模型颜色: 24位彩色影像
X-方向像素大小: 0.100000 毫米
地理信息:
------------------------------------------------------------------
影像比例尺: 1 : 10000
旋转角: 0.00000 度
X-方向地面分解率: 1.000000
Y-方向地面分解率: 1.000000
左下角坐标 [x,y]:13470.000 9930.000
右下角坐标 [x,y]:15130.000 9930.000
左上角坐标 [x,y]:13470.000 13160.000
右上角坐标 [x,y]:15130.000 13160.000
------------------------------------------------------------------
内定向信息: (D:\1\157-156)
------------------------------------------------------------------
左原始影像 ( D:\1\Images\01-157_50mic.vz ):
起点坐标 [行数 X 列数]: 2559.081 2559.961
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.011 My = 0.005
残差: 点号 dx dy
1 0.006 -0.005
2 -0.007 0.007
3 -0.011 -0.002
4 0.001 -0.001
5 -0.013 0.002
6 0.026 -0.009
7 -0.003 0.008
8 0.001 0.001
右原始影像 ( D:\1\Images\01-156_50mic.vz ):
起点坐标 [行数 X 列数]: 2528.954 2563.034
[ x0 X y0 ]: 0.000 0.000
RMS: Mx = 0.002 My = 0.012
残差: 点号 dx dy
1 -0.001 0.000
2 -0.000 0.011
3 -0.003 -0.003
4 0.001 -0.003
5 0.002 -0.023
6 0.001 0.008
7 0.003 -0.006
8 -0.002 0.018
------------------------------------------------------------------
相对定向信息: (D:\1\157-156)
------------------------------------------------------------------
相对定向信息:
左旋转矩阵:
0.99994397 0.01061600 -0.00007900
-0.01061600 0.99994397 -0.00000000
0.00007900 0.00000100 1.00000000
右旋转矩阵:
0.99993700 0.00566700 -0.00967300
-0.00565900 0.99998403 0.00083800
0.00967800 -0.00078400 0.99995297
右片旋转角 (rad):
Phi = 0.00007900
Omiga = 0.00000000
Kappa = -0.01061600
左片旋转角 (rad):
Phi = 0.00967400
Omiga = -0.00083800
Kappa = -0.00565900
残差: 点号 dq
1 -0.005000
2 0.005000
3 -0.000000
4 0.001000
5 0.004000
6 0.004000
7 0.000000
8 -0.003000
9 -0.000000
10 0.004000
11 0.001000
12 -0.000000
13 0.001000
14 0.001000
15 0.004000
16 -0.006000
17 0.003000
18 -0.002000
19 -0.004000
20 -0.000000
21 0.000000
22 0.001000
23 0.002000
24 0.002000
25 -0.002000
26 0.006000
27 -0.004000
28 0.002000
29 0.001000
30 -0.001000
31 -0.000000
32 -0.006000
33 -0.001000
34 0.003000
35 0.004000
36 -0.005000
37 0.002000
38 0.004000
39 -0.002000
40 0.003000
41 -0.002000
42 0.002000
43 -0.001000
44 0.001000
45 0.005000
46 -0.006000
47 0.002000
48 0.002000
49 -0.002000
50 0.005000
51 0.002000
52 -0.001000
53 0.001000
54 -0.002000
55 -0.001000
56 -0.003000
57 -0.006000
58 0.001000
59 -0.000000
60 -0.007000
61 -0.005000
62 0.002000
63 0.004000
64 -0.002000
65 -0.002000
66 -0.001000
67 0.003000
68 0.003000
69 -0.001000
70 0.002000
71 -0.003000
72 0.002000
73 -0.003000
74 -0.004000
75 -0.005000
76 -0.006000
77 -0.004000
78 -0.000000
79 0.006000
80 -0.002000
81 -0.004000
82 0.004000
83 0.001000
84 -0.001000
85 0.003000
86 -0.005000
87 -0.003000
88 -0.001000
89 0.002000
90 0.004000
91 0.005000
92 -0.007000
93 0.003000
94 -0.004000
95 -0.005000
96 0.004000
97 0.001000
98 -0.001000
99 -0.004000
100 0.000000
101 0.003000
102 -0.006000
103 -0.006000
104 -0.004000
105 0.002000
106 -0.004000
107 -0.003000
108 -0.004000
109 0.003000
110 0.006000
111 0.002000
112 -0.002000
113 -0.002000
114 0.001000
115 0.000000
116 0.004000
117 0.006000
118 0.002000
119 0.006000
120 0.004000
121 0.004000
122 0.002000
123 -0.002000
124 0.003000
125 0.005000
126 -0.006000
127 -0.007000
128 0.005000
129 -0.000000
130 -0.002000
131 -0.005000
132 -0.007000
133 -0.002000
134 -0.000000
135 -0.004000
136 -0.001000
137 0.001000
138 -0.003000
139 0.002000
140 -0.002000
141 -0.007000
142 0.004000
143 -0.005000
144 0.001000
145 -0.001000
146 0.004000
147 0.000000
148 0.002000
149 -0.005000
150 0.004000
151 -0.003000
152 0.002000
153 0.000000
154 0.005000
155 0.005000
156 0.000000
157 0.001000
158 -0.004000
159 0.001000
160 -0.000000
161 -0.005000
162 -0.000000
163 0.002000
164 0.004000
165 0.005000
166 -0.006000
167 -0.002000
168 0.005000
169 0.003000
170 -0.006000
171 0.004000
172 -0.001000
173 -0.003000
174 0.003000
175 0.000000
176 -0.004000
177 -0.004000
178 0.006000
179 0.001000
180 -0.002000
181 -0.003000
182 -0.001000
183 0.004000
184 -0.004000
185 -0.003000
186 -0.005000
187 -0.006000
188 -0.001000
189 -0.001000
190 0.003000
191 -0.003000
192 -0.004000
193 0.003000
194 0.001000
195 -0.000000
196 -0.003000
197 -0.005000
198 0.005000
199 0.006000
200 -0.002000
1157 0.053000
1156 -0.016000
2156 -0.026000
6157 0.037000
2157 -0.004000
RMS: Mq = 0.006000
绝对定向信息: (D:\1\157-156)
------------------------------------------------------------------
绝对定向信息:
左旋转矩阵:
0.99981833 0.01633384 0.00982216
-0.01635289 0.99986452 0.00186275
-0.00979040 -0.00202303 0.99995005
右旋转矩阵:
0.99993527 0.01137789 0.00023225
-0.01137849 0.99993145 0.00275617
-0.00020088 -0.00275863 0.99999619
左片摄站坐标:
Xs = 13556.032 Ys = 11541.992 Zs = 3244.534
右片摄站坐标:
Xs = 14921.135 Ys = 11534.159 Zs = 3231.032
残差:
1157 -0.338766 0.883808 0.158380
1156 -0.268120 -0.596858 0.519359
2156 0.317247 -0.436642 -0.426866
6157 0.629945 0.394548 0.768798
2157 -0.340307 -0.244855 -1.019671
RMS: mx = 0.399984 my = 0.555632
mxy = 0.684627 mz = 0.649278
------------------------------------------------------------------
影像匹配信息: (D:\1\157-156)
------------------------------------------------------------------
__________________ Initial parameters ______________________
left image: rows =4554 columns =2574
right image: rows =4554 columns =2574
Match window width = 11
Match window length = 11
Searching range = 1
Match grid X_interval = 11
Match grid Y_interval = 11
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 3
MATCH_AREAS == 33 X 19
____________________________________________________________
627 : 0 0.0 %
627 : 479 76.4 %
627 : 551 87.9 %
627 : 580 92.5 %
627 : 584 93.1 %
627 : 588 93.8 %
627 : 592 94.4 %
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 2
MATCH_AREAS == 101 X 57
____________________________________________________________
5757 : 0 0.0 %
5757 : 4599 79.9 %
5757 : 5059 87.9 %
5757 : 5252 91.2 %
5757 : 5329 92.6 %
5757 : 5353 93.0 %
5757 : 5384 93.5 %
5757 : 5394 93.7 %
5757 : 5412 94.0 %
5757 : 5425 94.2 %
5757 : 5430 94.3 %
5757 : 5435 94.4 %
5757 : 5439 94.5 %
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 1
MATCH_AREAS == 303 X 171
____________________________________________________________
51813 : 0 0.0 %
51813 : 40030 77.3 %
51813 : 44771 86.4 %
51813 : 46187 89.1 %
51813 : 47022 90.8 %
51813 : 47408 91.5 %
51813 : 47710 92.1 %
51813 : 47917 92.5 %
51813 : 48134 92.9 %
51813 : 48250 93.1 %
51813 : 48356 93.3 %
51813 : 48431 93.5 %
51813 : 48503 93.6 %
51813 : 48565 93.7 %
51813 : 48626 93.8 %
51813 : 48655 93.9 %
51813 : 48686 94.0 %
51813 : 48711 94.0 %
__________________________________________________________
MATCH_BLOCK == 1
MATCH_LEVEL == 0
MATCH_AREAS == 414 X 234
____________________________________________________________
96876 : 0 0.0 %
96876 : 70104 72.4 %
96876 : 76978 79.5 %
96876 : 79348 81.9 %
96876 : 80999 83.6 %
96876 : 81926 84.6 %
96876 : 82751 85.4 %
96876 : 83569 86.3 %
96876 : 84221 86.9 %
96876 : 84606 87.3 %
96876 : 84908 87.6 %
96876 : 85126 87.9 %
96876 : 85338 88.1 %
96876 : 85524 88.3 %
96876 : 85677 88.4 %
96876 : 85776 88.5 %
96876 : 85877 88.6 %
96876 : 85953 88.7 %
96876 : 86011 88.8 %
96876 : 86068 88.8 %
------------------------------------------------------------------
DEM 检查点中误差:
------------------------------------------------------------------
DEM 文件: D:\1\157-156\product\157-156.dem
检查点(控制点)文件: D:\1\jmd.ctl
------------------------------------------------------------------
点号 X Y Z dZ
1156 14936.858 12482.769 762.349 0.142
1157 13561.393 12644.357 791.479 -0.007
2156 14885.665 11308.226 1016.443 0.746
2157 13535.400 11444.393 895.774 1.057
6156 14947.986 10435.860 765.182 1.141
6157 13515.624 10360.523 944.991 -0.371
点数 = 6
均值 = 0.5
绝对均值 = 0.6
均方根 = 0.7
点号 百分比
dZ <= 1.0 : 4 66.7
1.0 < dZ <= 2.0 : 2 33.3
2.0 < dZ <= 3.0 : 0 0.0
3.0 < dZ <= 4.0 : 0 0.0
4.0 < dZ <= 5.0 : 0 0.0
5.0 < dZ <= 6.0 : 0 0.0
6.0 < dZ <= 10.0 : 0 0.0
10.0 < dZ <= 20.0 : 0 0.0
20.0 < dZ <= 100.0 : 0 0.0
------------------------------------------------------------------
VirtuoZo 影像文件信息 (正射影像):
------------------------------------------------------------------
影像文件名: D:\1\157-156\product\157-156.orl
行列数 [行数X列数]: 3231 X 1661
模型颜色: 24位彩色影像
X-方向像素大小: 0.100000 毫米
地理信息:
------------------------------------------------------------------
影像比例尺: 1 : 10000
旋转角: 0.00000 度
X-方向地面分解率: 1.000000
Y-方向地面分解率: 1.000000
左下角坐标 [x,y]:13470.000 9930.000
右下角坐标 [x,y]:15130.000 9930.000
左上角坐标 [x,y]:13470.000 13160.000
右上角坐标 [x,y]:15130.000 13160.000
-----------------------------------------------------------------