电气传动系统计算机仿真实训报告
简介
直流PWM-M调速系统近年来发展很快,直流PWM-M调速系统采用全控型电力电子器件,调制频率高,与晶闸管直流调速系统相比动态响应速度快,电动机转矩平稳脉动小,有很大的优越性,因此在小功率调速系统和伺服系统中的应用越来越广泛。直流PWM-M调速系统与晶闸管调速系统的不同主要在变流主电路上,采用了脉宽调制方式,至于转速和电流的控制和晶闸管直流调速系统一样。
直流PWM-M调速系统的PWM变换器有可逆和不可逆两类,而可逆变换器又有双极式、单极式和受限单极式等多种电路。本次实训我们组主要研究H型主电路双极式的PWM-M调速,并通过仿真分析工作过程。
原理
直流PWM-M调速系统的主要电路组成如图一所示,主电路由4个电力场效应晶体管VT1~4和4个续流二极管VD1~4成H型连接组成。当VT1和VT4导通时,有正向电流i1通过电动机M,电动机正转;当VT2和VT3导通时,有反向电流i2通过电动机M,电动机反转。VT1~VT4的驱动信号的调制原理如图二所示,在三角波与控制信号Uct相交时,分别产生驱动信号Ub1、Ub4和Ub2、Ub3。
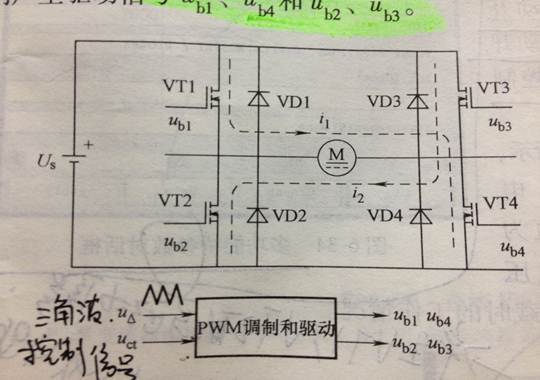
图一:直流PWM-M系统主电路
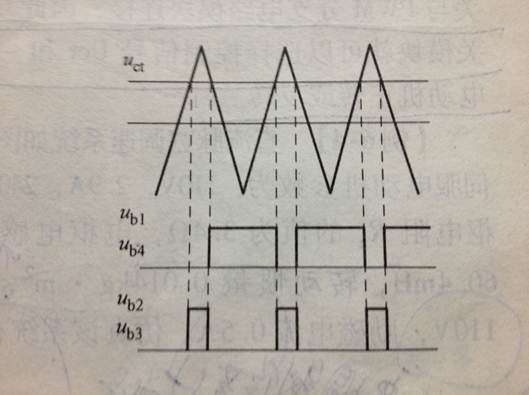
图二:直流PWM调制
图一直流PWM-M系统主电路的仿真模型如图三所示。
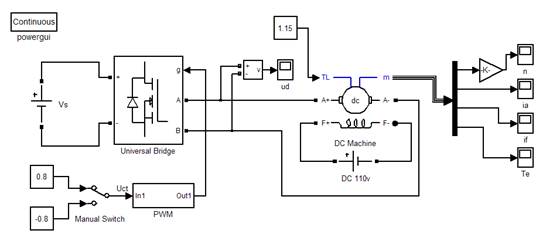
图三:直流PWM-M系统仿真模型
图中H型变流器调用了多功能桥(Universal Bridge),其参数设为两相桥臂,AB在交流输出端,开关器件为MOSFET。多功能桥模块参数设ABC在交流输出端时本来是用于逆变,现在用于直流PWM变流时,其驱动电路需要另外设计。设计的双极式驱动控制电路如图四所示,图中输入端In1接脉宽调制信号Uct,输出端Out1输出4路MOSFET的驱动信号。脉宽调制由两个PWM发生器(PWM Generator)模块进行,其中上方的PWM发生器产生VT1和VT2的驱动信号,下方的PWM发生器产生VT3和VT4的驱动信号,为了使PWM发生器输出的驱动信号顺序与多功能桥的驱动顺序一致,模型中加入一个选择器模块(Selector),调整了脉冲序列。因为MOSFET有导通和关断时间,为了避免上下桥臂的两个管子同时导通和关断,造成桥臂的直通现象,需要有“死时”限制,我们采取的办法是使下方的PWM发生器输入的控制信号为[Uct+0.001],即将下方的Uct略微抬高,使下方的PWM发生器输出信号变窄一些,这样上下管子就不会同时导通和关断。这个PWM驱动信号发生电路经封装后即形成图三中的PWM的分支电路模块。
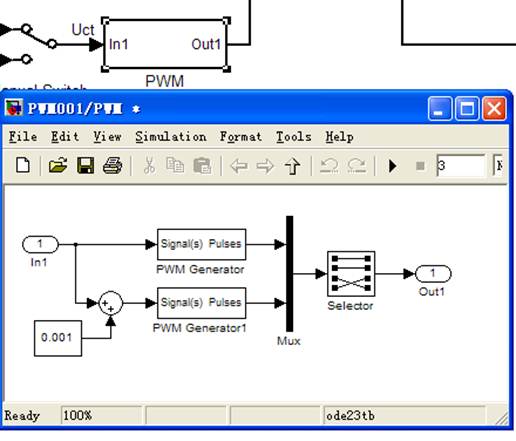
图四:双极式PWM驱动信号发生电路
在主电路模型中控制信号Uct通过互动开关与PWM分支电路模块连接,因此双击互动开关模块就可以选择控制信号Uct和-Uct。控制电动机正转或反转。
伺服电动机参数(如图五所示):电枢电阻Ra=3.4Ω,电枢电感La=60.4mH,转动惯量J=0.014kg·㎡,励磁电压Uf=110V,励磁电流Ia=0.5A。仿真该系统在额定负载时的工作情况。
根据伺服电动机参数计算得伺服电动机励磁电阻Rf=220Ω,励磁电感Lf=0,Laf=0.797mH。将电动机参数输入电动机模块对话框。并通过常数模块输入额定负载转矩Tl=9.55*Ce*Ia=1.15N·m。
在直流PWM模型中,控制信号Uct的取值范围为0~1,Uct也就是双极性PWM的调制度ρ,当Uct=0.8时,PWM交流器的直流电源电压Us=Un/ρ=140V。
图五:伺服电动机参数
直流PWM模型按上述额定参数仿真的结果如下所示。
图六为变流器输出电压放大前的图像,图七为变流器输出电压放大后的一部分(0.01~0.0145s),电压波形呈良好的矩形波,如果不设一定的“死时”,由于上下桥臂管子的换流重叠现象,使输出电压呈梯形如图八所示。
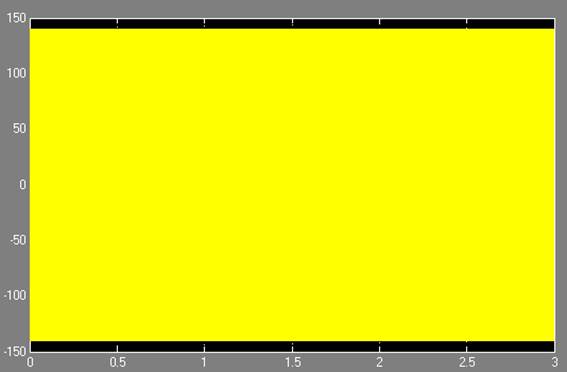
图六:变流器输出电压Ud放大前
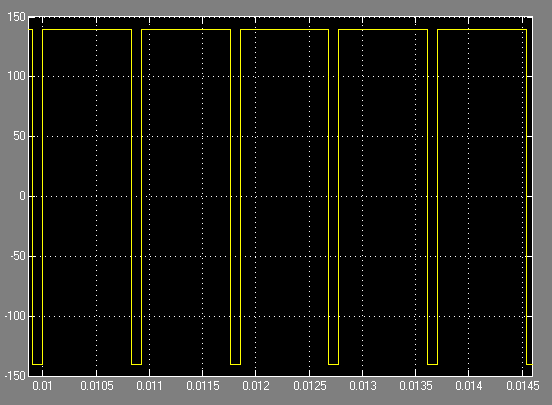
图七:变流器输出电压Ud放大后
图八::不设“死时”时变流器输出电压Ud
第二篇:物流系统仿真实训报告
课
程
设
计
报
告
实验项目名称
班 级 物流工程1007班
姓名 刘静
本组成员 房东升 罗文振 朱建 徐娟 陈飞 刘静 周建
吕孝甫
实 验 日 期 2012-6-1
一、 实验目的
实践一个实际系统的计算机仿真,通过对实际系统的数据采集、建模和仿真分析,为实际系统提出改进和优化方案,全面了解计算机仿真技术的应用,同时通过分组合作的形式,提供一种系统仿真工作常见的团队协作方式的实践体验,培养协调工作共同完成任务的能力。仿真的目的是建立一个典型的配送中心建模,并研究该配送中心的即时库存成本和利润,试图加以改善。
二、 实验内容
三、 实验步骤
四.实验结果和心得