实验四霍尔式传感器的静态位移特性—直流激励
一、实验目的
了解霍尔式传感器的原理与特性。
二、所需单元及部件
霍尔片、磁路系统、电桥、差动放大器、V/F表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V档,直流稳压电源置2V档,主、副电源关闭。
三、实验步骤:
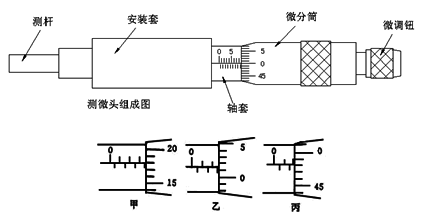
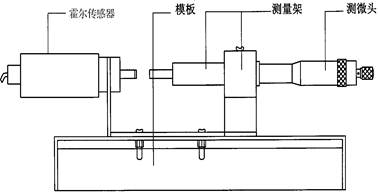
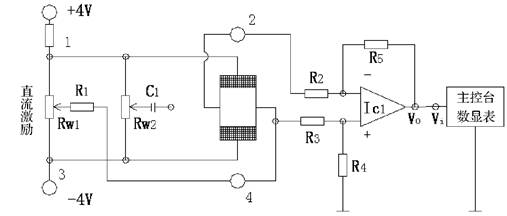
(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
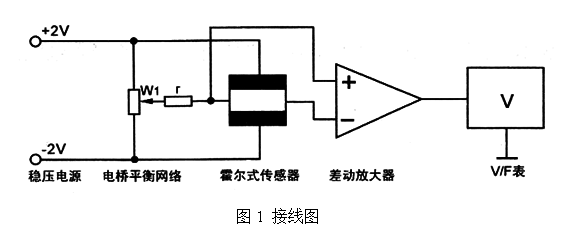
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V/F表读数明显变化,关闭主,副电源,根据图1接线,W1、r为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
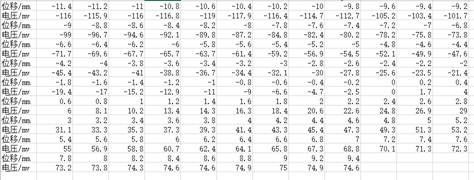
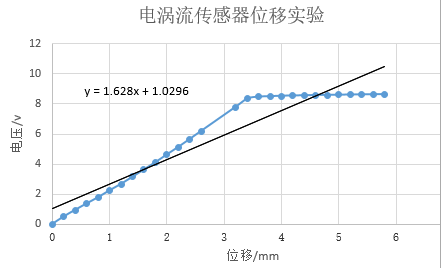
(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm读一个数,将读数填入下表:
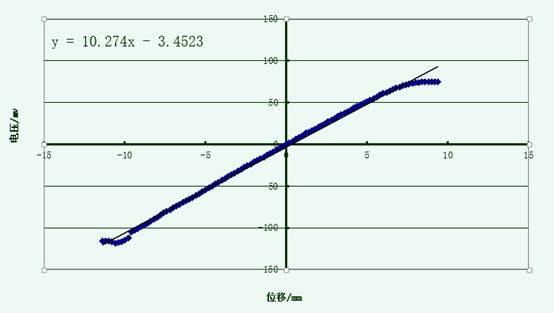
作出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
四、实验数据及处理

V—X曲线
…… …… 余下全文
 ,式中k—位移传感器的灵敏度。这样它就可以用来测量位移。霍尔电动势的极性表示了元件的方向。磁场梯度越大,灵敏度越高;磁场梯度越均匀,输出线性度就越好。
,式中k—位移传感器的灵敏度。这样它就可以用来测量位移。霍尔电动势的极性表示了元件的方向。磁场梯度越大,灵敏度越高;磁场梯度越均匀,输出线性度就越好。


 ,当霍尔元件处在梯度磁场中运动时,它的电动势发生变化,利用这一特性进行位移测量。
,当霍尔元件处在梯度磁场中运动时,它的电动势发生变化,利用这一特性进行位移测量。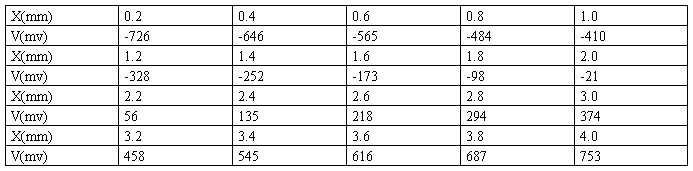
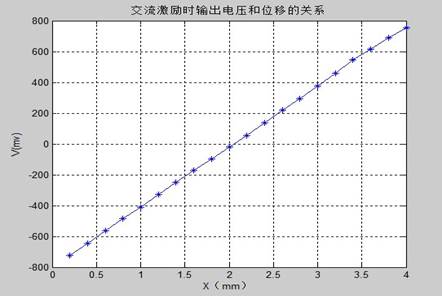
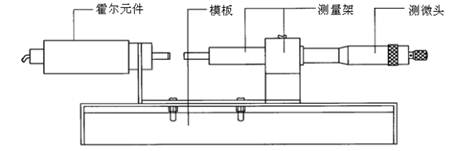
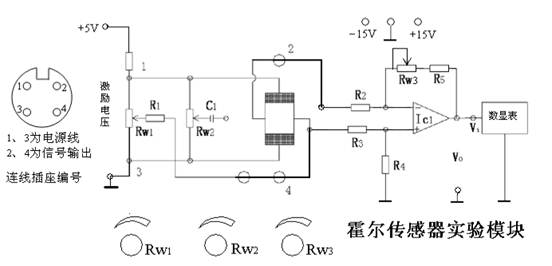
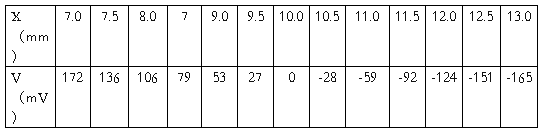
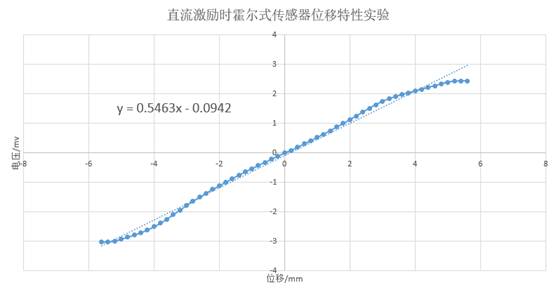
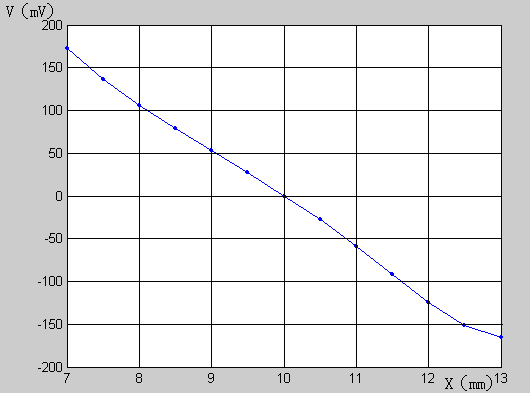 图8-3 霍尔传感器位移量与输出电压特性曲线
图8-3 霍尔传感器位移量与输出电压特性曲线