自动控制原理知识点总结
第一章
1.什么是自动控制?(填空)
自动控制:是指在无人直接参与的情况下,利用控制装置操纵受控对象,是被控量等于给定值或按给定信号的变化规律去变化的过程。
2.自动控制系统的两种常用控制方式是什么?(填空)
开环控制和闭环控制
3.开环控制和闭环控制的概念?
开环控制:控制装置与受控对象之间只有顺向作用而无反向联系
特点:开环控制实施起来简单,但抗扰动能力较差,控制精度也不高。
闭环控制:控制装置与受控对象之间,不但有顺向作用,而且还有反向联系,既有被控量对被控过程的影响。
主要特点:抗扰动能力强,控制精度高,但存在能否正常工作,即稳定与否的问题。
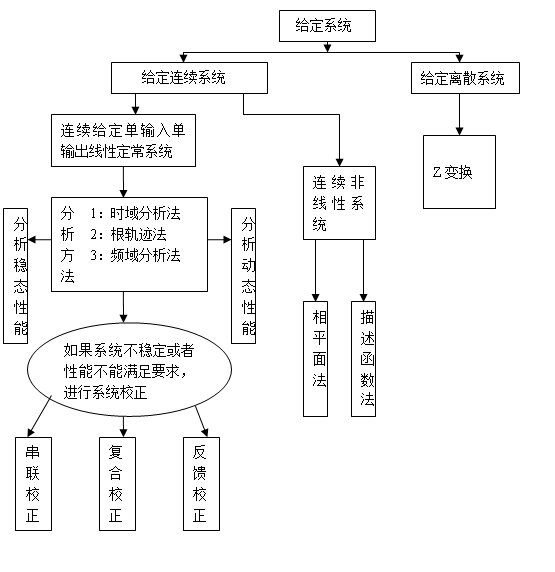
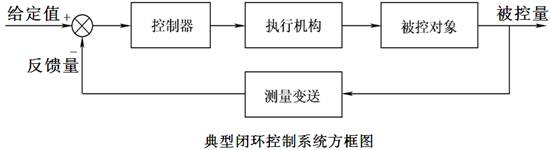
掌握典型闭环控制系统的结构。开环控制和闭环控制各自的优缺点?
(分析题:对一个实际的控制系统,能够参照下图画出其闭环控制方框图。)
4.控制系统的性能指标主要表现在哪三个方面?各自的定义?(填空或判断)
(1)、稳定性:系统受到外作用后,其动态过程的振荡倾向和系统恢复平衡的能力
(2)、快速性:通过动态过程时间长短来表征的
(3)、准确性:有输入给定值与输入响应的终值之间的差值 来表征的
来表征的
第二章
1.控制系统的数学模型有什么?(填空)
微分方程、传递函数、动态结构图、频率特性
2.了解微分方程的建立?
(1)、确定系统的输入变量和输入变量
(2)、建立初始微分方程组。即根据各环节所遵循的基本物理规律,分别列写出相应的微分方程,并建立微分方程组
(3)、 消除中间变量,将式子标准化。将与输入量有关的项写在方程式等号的右边,与输出量有关的项写在等号的左边
3.传递函数定义和性质?认真理解。(填空或选择)
传递函数:在零初始条件下,线性定常系统输出量的拉普拉斯变换域系统输入量的拉普拉斯变换之比
4.七个典型环节的传递函数(必须掌握)。了解其特点。(简答)
…… …… 余下全文

 来表征的
来表征的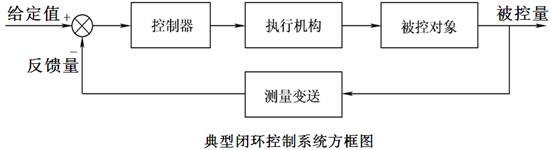
 来表征的
来表征的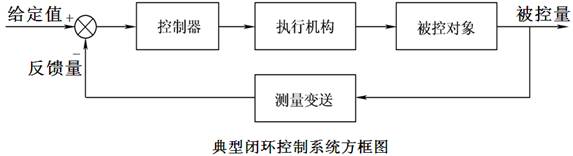 sa
sa