江 西 理 工 大 学
创新实验报告
题 目:循迹小车的制作
学 院:电气工程与自动化学院
专 业:自动化
班 级: 113
学 生:黄盼
学 号:23
时间:20##年8月2号
目 录
目 录...
摘 要:...
1.任务及要求...
…… …… 余下全文
江 西 理 工 大 学
创新实验报告
题 目:循迹小车的制作
学 院:电气工程与自动化学院
专 业:自动化
班 级: 113
学 生:黄盼
学 号:23
时间:20##年8月2号
目 录
目 录...
摘 要:...
1.任务及要求...
…… …… 余下全文
青岛理工大学琴岛学院
课程设计报告
课题名称:智能循迹机器人小车 学 院:机电工程系
专业班级:电气工程及其自动化 学 号:20100202129 学 生:许辉
指导老师:张岐磊
青岛理工大学琴岛学院教务处 2012 年 12 月 14 日
…… …… 余下全文
电子作品设计报告
项目名称: 智能小车
学院: 机电工程学院
专业: 应用电子技术
班级: 09应电(1)班
组别: 第 三 组
姓名: 杨磊 赖焕宁 梁广生
指导老师:杨青勇 玉宁
…… …… 余下全文
电子信息专业实验报告
课 程 电子信息系统综合设计实验MCU部分
实验题目 智能机器小车设计 实验总分
学生姓名 学 号
学生姓名 学 号
学生姓名 学 号
实验时间 地 点分组
电子信息学院专业实验中心
目录
一、摘要
二、题目要求
三、软硬件设计方案
四、各部分电路的作用及电路工作原理分析
五、系统调试与实验结果
六、实验结果
七、拓展功能
八、参考资料
九、附录
一、摘要
摘要:智能循迹小车主要由单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。本次设计我们采用STC89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够识别黑白两色路面,电机模块由L293D芯片和两个减速直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词 智能小车 STC89C52单片机 L293D芯片 红外光对管
二、题目要求
“智能寻迹机器小车设计”,要求采用MCS-51单片机为控制芯片,设计出一个能够识别并沿着以白底为道路色,宽度5mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹行进的智能寻迹机器小车。
…… …… 余下全文
电子作品设计报告
项目名称:智能循迹小车
摘要:本组的智能循迹小车是采用自主设计的车体,以两个直流电机来驱动小车,各个模块自行设计。通过反射式红外光电传感器TCRT5000来采集跑道信息,传送至主控芯片STC12C5A60S2单片机, 进行数据处理后,送进驱动芯片L298N以完成相应的操作,实现小车的自主循迹功能。
关键词:STC12C5A60S2 L298N 反射式红外光电传感器TCRT5000 自动循迹
引言:
随着电子科技的迅猛发展,人们对技术也提出了更高的要求。汽车的智能化在提高汽车的行驶安全性,操作性等方面都有巨大的优势,在一些特殊的场合下也能满足一些特殊的需要。智能小车系统涉及到自动控制,车辆工程,计算机等多个领域,是未来汽车智能化是一个不可避免的大趋势。本文设计的智能小车以STC12C5A60S2单片机为控制核心,用反射式红外光电传感器TCRT5000作为检测元件实现小车的自主循迹前行功能。
一、系统设计
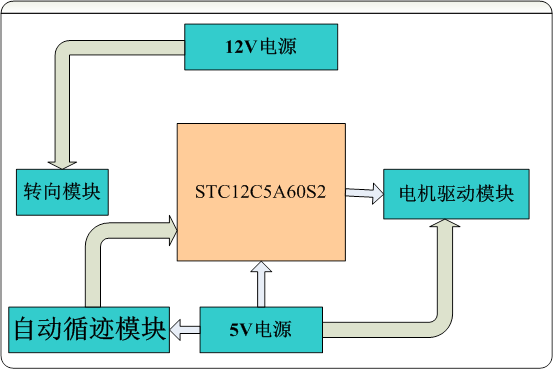
本组智能小车的硬件主要有以STC12C5A60S2 作为微处理器,小车主要由自动循迹模块,电机驱动模块,前轮转向模块,电源模块,比较器模块组成。电机驱动部分我们采用12V直流电源直接供电,其他部分由3个5V稳压模块供电。
小车硬件系统结构示意图如下:
(1)实现小车沿规定轨迹前进 ;
(2)电路板自行设计,车体不可采用飞思卡尔车模;
1.2车体方案论证与选择:
根据比赛设计要求,我们的车模不可使用飞思卡尔或玩具车的整体车模,我们采用自主设计车体。一方面是符合比赛设计要求,另一方面是我们的车体要求不是很难,可以通过自己设计出来,节省大量资金,并且灵活性强。
…… …… 余下全文

实践设计报告
(嵌入式技术实践二)
学 院:电气工程与自动化学院
题 目:基于51单片机的循迹小车
专业班级:自动化131班
学 号:19
学生姓名:吴亚敏
指导老师:温如春
2014年6月30日
…… …… 余下全文
宜宾职业技术学院
《单片机系统设计》
项目设计报告
项目设计题目:智能寻迹避小车的实现
系 部:电子信息与控制工程系
班 级:电 子 11201 班
组 号:第 四 组
小 组 成 员:陈鼎 徐 成 焱
毛池贵 蒲 东
指 导 教 师: 罗 德 雄
20##年9月30日
目录
一、 引言……………………………………………….3
二、 方案论证………………………………………….4
三、 小车车体设计…………………………………….7
四、 硬件系统设计…………………………………….8
1、 单片机最小系统………………………………….8
2、 循迹电路…………………………………………..9
…… …… 余下全文

