青岛理工大学琴岛学院
课程设计报告
课题名称:机械原理课程设计
学 院:机电工程系
专业班级:机械设计制造及其自动化
学 号:20090201012
学 生:吴涵
指导老师:胡之杨
青岛理工大学琴岛学院教务处
20## 年 6 月 29 日

…… …… 余下全文
课题名称:机械原理课程设计
学 院:机电工程系
专业班级:机械设计制造及其自动化
学 号:20090201012
学 生:吴涵
指导老师:胡之杨
青岛理工大学琴岛学院教务处
20## 年 6 月 29 日
…… …… 余下全文
机械原理实验项目
机械原理课程实验(一)
机械传动性能测试实验
一、实验目的
(1) 通过测试常见机械传动装置(如带传动、链传动、齿轮传动、蜗杆传动等)在传递运动与动力过程中的速度、转矩、传动比、功率及机械效率等,加深对常见机械传动性能的认识与理解。
(2) 通过测试由常见机械传动组成的不同传动系统的机械参数,掌握机械传动合理布置的基本要求。
(3) 通过实验认识机械传动性能综合实验台的工作原理、提高计算机辅助实验能力。
二、实验设备
机械传动性能测试综合实验台。
三、实验内容
 机械传动性能测试是一项基于基本传动单元自由组装、利用传感器获取相关信息、采用工控机控制实验对象的综合性实验。它可以测量用户自行组装的机械传动装置中的速度、转矩、传动比、功率与机械效率,具有数据采集与处理、输出结果数据与曲线等功能。
机械传动性能测试是一项基于基本传动单元自由组装、利用传感器获取相关信息、采用工控机控制实验对象的综合性实验。它可以测量用户自行组装的机械传动装置中的速度、转矩、传动比、功率与机械效率,具有数据采集与处理、输出结果数据与曲线等功能。
机械原理课程实验(二)
慧鱼机器人设计实验
一、实验目的
1)通过对慧鱼机器人、机电产品的系统运动方案的组装设计,培养学生独立确定系统运动方案设计与选型的能力。
2)利用“慧鱼模型”组装机器人模型,探索机器人各个功能的实现方法,进行机电一体化方面的训练。
二、实验设备
1)慧鱼创意组合模型包;
2)计算机一台;
3)可编程控制器、智能接口板;
4)控制软件。
三、实验内容
 “慧鱼创意组合模型”是工程技术型模型,能够实现对工程技术以及机器人技术等的模拟仿真。模型是由各种可以相互拼接的零件所组成,由于模型充分体现了各种结构、动力、控制的组成因素,并设计了相应的模块,因此,可以拼装成各种各样的机器人模型,可以用于检验学生的机械结构和机械创新设计与控制的合理可行性。
“慧鱼创意组合模型”是工程技术型模型,能够实现对工程技术以及机器人技术等的模拟仿真。模型是由各种可以相互拼接的零件所组成,由于模型充分体现了各种结构、动力、控制的组成因素,并设计了相应的模块,因此,可以拼装成各种各样的机器人模型,可以用于检验学生的机械结构和机械创新设计与控制的合理可行性。
慧鱼机器人实验二室
机械原理课程实验(三)
PLC控制实验
一、实验目的
1)了解全自动加工中心、自动化立体仓库、焊接站等工业模型的组装设计,控制原理及PLC在工业中的应用;
…… …… 余下全文
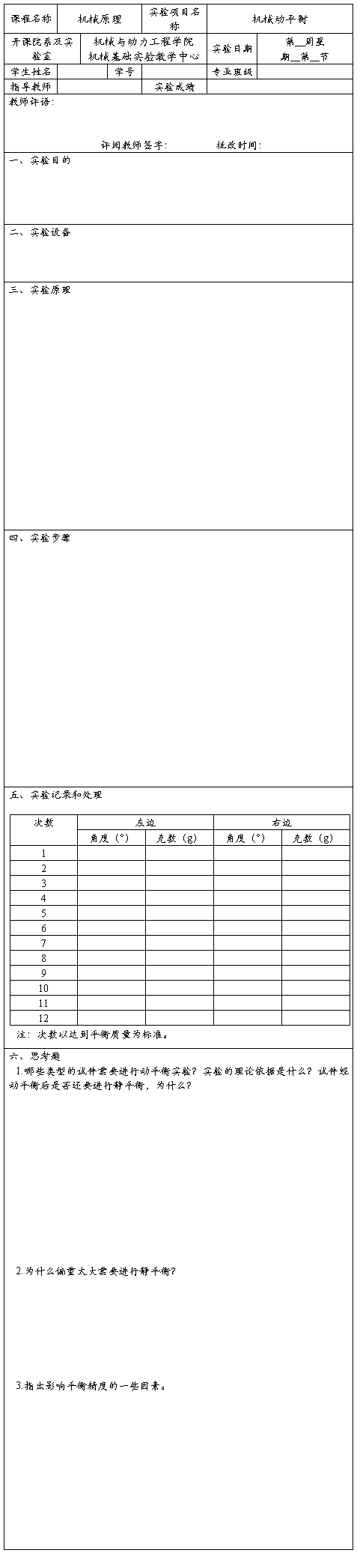
实验三:刚性转子动平衡实验
一、实验目的
1、加深对刚性转子动平衡概念的理解;
2、掌握刚性转子动平衡实验的原理及基本方法。
3、了解动平衡试验机的结构组成及工作原理。
二、实验设备
1、JPH-A型动平衡实验台;
2、转子试件;
3、平衡块;
4、百分表0~10mm。
三、实验原理
由《机械原理》所述的回转体动平衡原理知:一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡质量 所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量
所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量 和
和 (它们的质心位置分别为
(它们的质心位置分别为 和
和 ,半径大小可根据数值、的不同而不同)所产生的离心力。动平衡的任务就是在这两个任选的平面(称为平衡基面Ⅰ、Ⅱ)内的适当位置(
,半径大小可根据数值、的不同而不同)所产生的离心力。动平衡的任务就是在这两个任选的平面(称为平衡基面Ⅰ、Ⅱ)内的适当位置( 和
和 )加上两个适当大小的平衡重
)加上两个适当大小的平衡重 和
和 ,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即:
,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即:


半径 越大,则所需的平衡重
越大,则所需的平衡重 就越小。此时,Σ
就越小。此时,Σ =0且Σ
=0且Σ =0,该回转体达到动平衡。
=0,该回转体达到动平衡。
转子不平衡质量的分布有很大的随机性,而无法直接判断其大小和方位。因此很难用公式来计算平衡重,但可用实验方法来解决。
“刚性转子动平衡实验”是利用实验用动平衡实验台测定需加于两个平衡基面上的平衡质量的大小和方位,并通过增减配重质量来进行校正,直到达到平衡。
四、实验方法和步骤
1、将平衡试件装到摆架的滚轮上,把试件右端的联轴器盘与差速器轴端的联轴器盘,用弹性柱销柔性联成一体。装上传动皮带。
2、用手转动试件和摇动蜗杆上的手柄,检查动平衡机各部分转动是否正常。松开摆架最右端的两对锁紧螺母,调节摆架上面的安放在支承杆上的百分表,使之与摆架有一定的接触,并随时注意振幅大小。
3、开机前将试件右端圆盘上装上适当的待平衡质量(四块平衡块),接上电源启动电机,待摆架振动稳定后,调整好百分表的位置并记录下振幅大小y0(格),百分表的位置以后不要再变动,停机。
…… …… 余下全文
河南农业大学机电工程学院

机构认识实验指导书
一、 实验目的和任务
1.实验目的
1).初步了解《机械原理》课程所研究的各种常用机构的结构、类型、特点及应用实例。
2).增强学生对机构与机器的感性认识。
2.实验任务
1)对机器的认识
通过实物模型和机构的观察,学生可以认识到:机器是由一个机构或几个机构按照一定运动要求组合而成的。所以只要掌握各种机构的运动特性,再去研究任何机器的特性就不困难了。在机械原理中,运动副是以两构件的直接接触形式的可动联接及运动特征来命名的。如:高副、低副、转动副、移动副等。
2)平面四杆机构
平面连杆机构中结构最简单,应用最广泛的是四杆机构,四杆机构分成三大类:即铰链四杆机构;单移动副机构;双移动副机构。
(1).铰链四杆机构分为:曲柄摇杆机构、双曲柄机构、双摇杆机构,即根据两连架杆为曲柄,或摇杆来确定。
(2).单移动副机构,它是以一个移动副代替铰链四杆机构中的一个转动副演化而成的。可分为:曲柄滑块机构,曲柄摇块机构、转动导杆机构及摆动导杆机构等。
(3).双移动副机构是带有两个移动副的四杆机构,把它们倒置也可得到:曲柄移动导杆机构、双滑块机构及双转块机构。
3)凸轮机构
凸轮机构常用于把主动构件的连续运动,转变为从动件严格地按照预定规律的运动。只要适当设计凸轮廓线,便可以使从动件获得任意的运动规律。由于凸轮机构结构简单、紧凑,因此广泛应用于各种机械,仪器及操纵控制装置中。
凸轮机构主要有三部分组成,即:凸轮(它有特定的廓线)、从动件(它由凸轮廓线控制着)及机架。
凸轮机构的类型较多,学生在参观这部分时应了解各种凸轮的特点和结构,找出其中的共同特点。
4)齿轮机构
齿轮机构是现代机械中应用最广泛的一种传动机构。具有传动准确、可靠、运转平稳、承载能力大、体积小、效率高等优点,广泛应用于各种机器中。根据轮齿的形状齿轮分为:直齿圆柱齿轮、斜齿圆柱齿轮、圆锥齿轮及蜗轮、蜗杆。根据主、从动轮的两轴线相对位置,齿轮传动分为:平行轴传动、相交轴传动、交错轴传动三大类。
…… …… 余下全文
机械原理实验报告
姓名:
班级:
学号:
日期:
现代机械设计教研室
河南机电高等专科学校
机构现场认识实验报告
一、平面连杆机构
1.根据机构中移动副数目的不同,平面四杆机构可分为 、 、 三种类型。
2.根据连架杆是否能整周转动,平面铰链四杆机可分为 、
…… …… 余下全文
机械原理实验指导
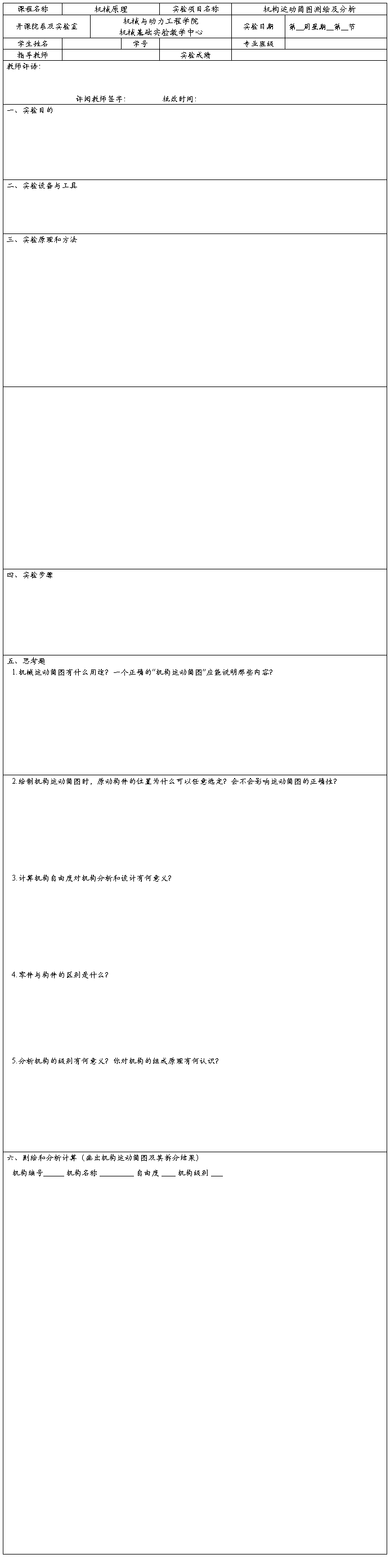
实验一 机构运动简图的测绘
一、 实验目的
1.掌握根据各种机构实物或模型绘制机构运动简图的方法;
2.验证机构自由度的计算公式;
3.分析某些四杆机构的演化过程。
二、 实验设备和工具
1.各类机构的模型和实物;
2.钢板尺、量角器、内外卡钳等;
3.三角尺、铅笔、橡皮、草稿纸等(自备)。
三、 实验原理
由于机构的运动仅与机构中构件的数目和构件所组成的运动副数目、类型和相对位置有关。因此,可以撇开构件的实际外形和运动副的具体构造,用简单的线条来表示构件,用规定的或惯用的符号来表示运动副,并按一定的比例画出运动副的相对位置,这种简单的图形即为机构运动简图。
四、 实验步骤
1.使被测机构缓慢运动,从原动件开始,循着传动路线观察机构的运动,分清各个运动单元,确定组成机构的构件数目;
2.根据直接相联接两构件的接触情况及相对运动性质,确定运动副的种类;
3.选择能清楚表达各构件相互关系的投影面,从原动件开始,按传动路线用规定的符号,以目测的比例画出机构运动示意图,再仔细测量与机构有关的尺寸,按确定的比例再画出机构运动简图,用数字1、2、3……分别标注各构件,用字母A、B、C……分别标注各运动副;
比例尺
4.分析机构运动的确定性,计算机构运动的自由度。
五、 思考题
…… …… 余下全文
河北工程大学机电学院
机械原理实验报告
专业班级
姓 名
学 号
一 实验名称:
二 实验原理:
三 实验目的:
四 实验仪器及设备:
五 实验步骤:
六 简要回答下列问题:
1、平面连杆机构有哪些类型?曲柄存在的条件是什么?哪些四连杆机构能由转动转换为移动?
2、凸轮机构由哪些构件组成?在示教板上所列的几种凸轮机构中,指出凸轮和推杆运动形式?
平面机构自由度的计算公式:
F=3n-2pL-pH
式中: F——机构自由度数目
n——活动构件数
pL——低副数
pH——高副数


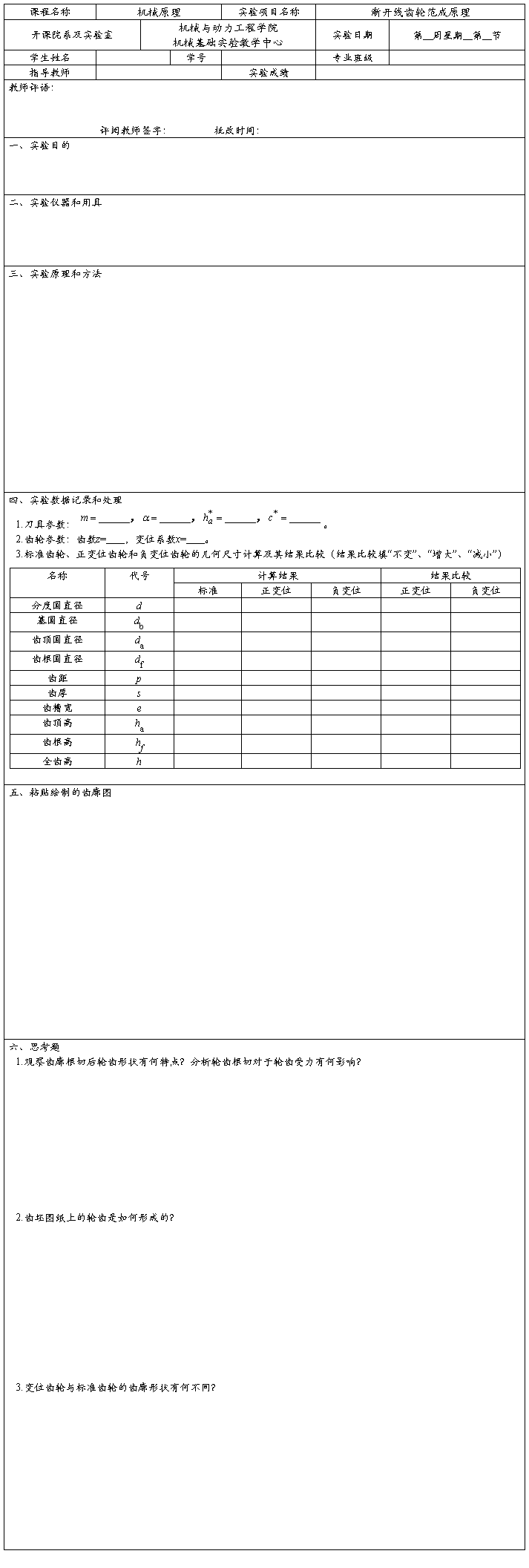
渐开线齿轮范成实验报告
一、实验名称:
二、实验原理:
三、实验目的:
四、实验仪器及设备:
五、实验步骤:
六、实验有关数据记录:
(一)被加工齿轮的基本参数:
(二)齿条刀的基本参数
(三)内容
1、标准齿轮
2、正变位齿轮
…… …… 余下全文