
完成日期:20##年 5月 26日
目录
1 机器的功能和设计要求…………………………………….2
1.1 简述………………………………………………………………2
1.2 硬币分拣机的系统组成…………………………………………2
1.3 硬币分拣包装机的设计要求和主要参数………………………3
2 工作原理和工艺动作分解………………………………….4
3 根据工艺动作顺序和协调要求拟定运动循环图…………5
4 机构选型及机械运动方案的选择和评定…………………………..5
5 所选定机构的设计计算过程及各阶段的结果……………6
6 主要参考文献……………………………………………...13
7 设计心得…………………………………………………13
1 机器的功能和设计要求
1.1 简述
本次设计题目为硬币分拣机设计,本项目属于应用于现代化的创新性设计。该设备主要用于多种硬币的分选、计数、包装,该设备实现了自动化操作,达到高效、可靠、生产率高、减轻劳动成本的目的。在目前国内的小面值货币流通的领域,硬币分拣大多为人工操作,生产率低,浪费劳动成本。所以,此设备的研制可以改善这一状况,节约劳动力成本,提高劳动生产率。
表1-1 我国目前流通币种及其基本信息

1.2 硬币分拣机的系统组成
由机械系统和控制系统两部分组成。
机械系统可分为7个主要功能单元,各个功能单元具有一定的独立性。
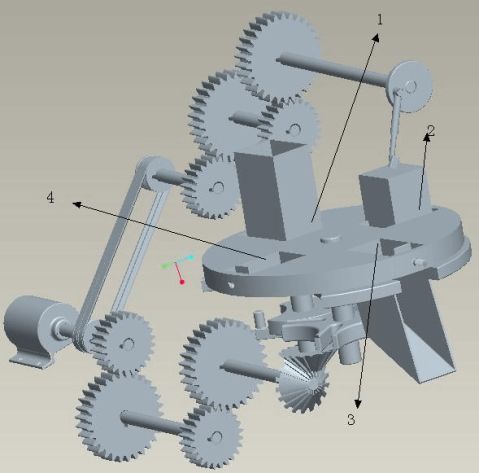
图1-1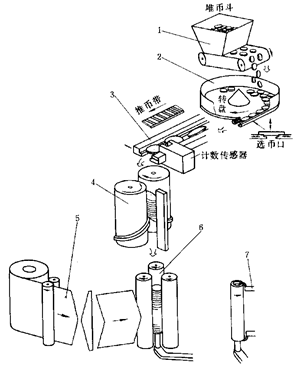 硬币分拣包装机功能示意图
硬币分拣包装机功能示意图
1、 硬币堆放、输送功能单元
2、 硬币排列、分选功能单元
3、 硬币分选计数功能单元
4、 硬币堆码、整理功能单元
5、 送纸、撕纸功能单元
6、 硬币包装功能单元
7、 卷边功能单元
图1-2
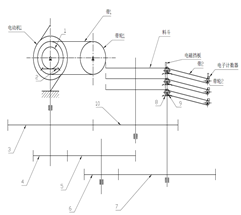
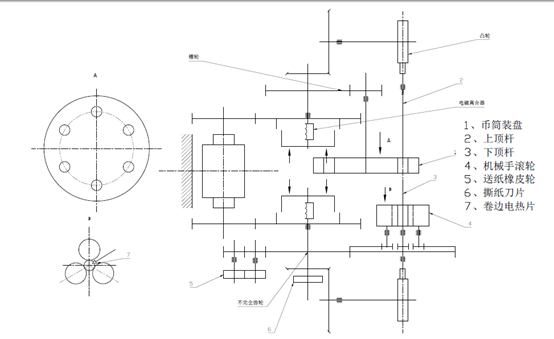
图1-3
1.3 硬币分拣包装机的设计要求和主要参数
(1)包装能力: ;
;
(2)驱动电机: ;
;
(3)机械运动方案力求简单;
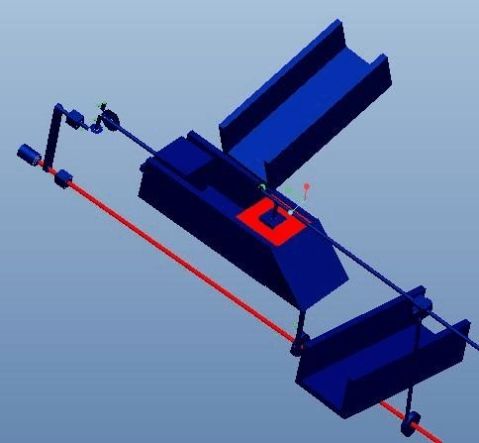
(4)图1-2表示功能单元1和2,希望能准确分离不同大小的硬币。图1-3表示功能单元3~7,希望能实现各部分协调工作。
(5)顶杆运动有冲击力,希望顶住硬币时冲击力较小。
(6)机械手既要包装又有定位,所以滚轮能加热,且具有一定的摩擦以带动硬币旋转。
2 工作原理和工艺动作分解
根据上述分析,硬币分拣包装机要求完成的工艺动作有以下五个动作:
(1)漏斗将硬币送到传输带上,再送到加速分拣单元上。
(2)加速分拣单元的运动方式是做扭转运动。料斗分三层,上两层开有分选孔,第一层孔大小比五角、一角硬币稍大,比一元硬币小;第二层孔大小比一角大,比五角小。这样在旋转时达到分离三种硬币的效果。另外,硬币在料斗中随着惯性向前运动,在料斗的侧面开出滑道口,符合规格的硬币通过小孔直接落入滑道,滑道口大小由上至下依次为一元、五角、一角。
(3)滑道底面是传送带,侧面装有计数器,两端口装有电磁挡板,以达到准确计数的效果。
计数器每计完一百个硬币,电磁挡板自动挡住滑道口,以便下一步工作。
(4)硬币经过送料机分选后经过滑道直接滑入币筒中,每个币筒容量为一百个,完成码堆。利用间歇运动机构完成币筒的间歇装动,利用顶杆将硬币送到包装单元。
(5)利用间歇机构完成送纸及包装。机械手又三个带有加热装置的偏心摩擦轮,通过摩擦轮的转动带动包装塑料纸及硬币转动,以达到包装侧面的效果。硬币堆两端各有加热片,硬币堆装动时,自动完成勾边。
上述五个动作,加料,分拣,计数比较简单,不做太多的考虑。硬币分拣包装机设计时应重点考虑以下三个机构的设计问题:币筒的间歇转动机构,机械手及送纸机构的间歇运动机构,顶杆的上下运动。
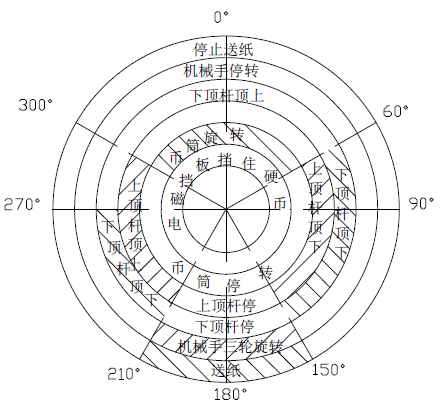
3 根据工艺动作顺序和协调要求拟定运动循环图
对于硬币分拣包装机运动循环图,主要是确定币筒、顶杆、机械手、送纸橡胶轮的先后顺序、相位,以及对各执行机构的设计、装配和调试。以上凸轮为定标构件,上凸轮每旋转一周为一个运动循环。如图:
图3-1
4 机构选型及机械运动方案的选择和评定
根据币筒、顶杆、机械手和送纸橡皮轮这三个执行构件动作要求和结构特点,可选择如表4-1的常用的机构:
表4-1

根据表4-1所示的三个执行机构的形态矩阵,由此可求出硬币分拣包装机的机械运动方案数为:

现在可以按给定条件、各机构的相容性和尽量使机构简单等来选择方案。我们选定的机构比较简单的方案为:币筒机构为槽轮机构、顶杆机构为凸轮顶杆机构、机械手、送纸橡皮轮机构为不完全齿轮机构。
5 所选定机构的设计计算过程及各阶段的结果

6 主要参考文献
1、 机械原理课程设计指导书。同济大学机械原理与设计教研室
2、 孙桓,陈作模,葛文杰,机械原理(第七版)高等教育出版社,2006
3、 李兴华,机械设计课程设计 清华大学出版社,2012
7 设计心得
通过这2个月的努力,从初步的想法到具体的数据,设计逐渐成型。在设计过程中,我们遇到了不少问题,比如凸轮的设计,由于计算与设计的繁琐,让我们付出了大量的脑力。也比如如何让硬币实现分拣功能,为此我们多次开会,讨论可行性。最终选定了目前的分拣装置,更好地满足效率与准确分离的功能。像包装功能的实现,间歇机构的设计等等难点,无不暴露了我们在学科学习中的遗漏点与不足。通过这次课程设计,我们脚踏实地地掌握了知识,串联了书本的相关知识点。更明白了集体的力量与智慧,合作的创造力。齐心协力,我们的设计会更完美。
第二篇:机械原理设计自动打印机
机械原理课程设计

自动打印机
院 系: 工学院 专 业: 机械工程及自动化 年 级: 学生姓名: 学 号: 指导教师: 小组成员:
20xx年1月
1
目录
一.机械原理课程设计的目的与任务 ??????????? 3
二.课程设计任务书????????????????????4
三.课程任务设计分析???????????????????5
四.机械运动的构思与设计?????????????????5
五.整体设计方案运动简图?????????????????11
六.方案设计的比较????????????????????13
七.设计心得体会?????????????????????15
八.参考文献???????????????????????16
附CAD二维简图,Pro/E三维立体结构图电子版
2
一. 机械原理课程设计的目的与任务
机械原理课程设计的目的是使学生较全面、系统地掌握和深化机械原理课程所学的基本原理和方法的重要环节,是培养学生“初步具有拟定机械运动方案、分析和设计机构的能力”及“增强学生对机械技术工作的适应能力和开发创造与创新能力”的一种手段。其目的是:
(1).以现代机械系统运动方案拟定与设计为主线,将机械原理课程中分散基本理论与方法联系起来,进一步巩固和加深学生对知识的理解和掌握。
(2).使学生在讨论机械运动多的变换与传递及力的传递的过程中,对机械的运动,动力分析与设计有一个较完整的概念。
(3).进一步提高学生的绘图,运用计算机和技术资源的能力。
(4).通过编写课程设计说明书,培养学生表达,归纳,总结,独立思考的能力。
机械设计的任务是按照给定的机械总功能的要求,分解形成分功能,再进行机构的选型与组合;设计该机构的若干运动方案中,对各运动方案进行对比和选择;对选定方案中的机构(如连杆机构、齿轮机构、凸轮机构、组合结构、其他常用机构等)进行分析与设计;制定机构运功循环图;设计飞轮;进行机械动力分析。
3
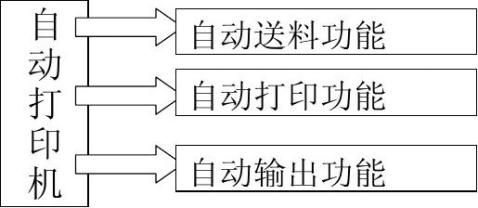
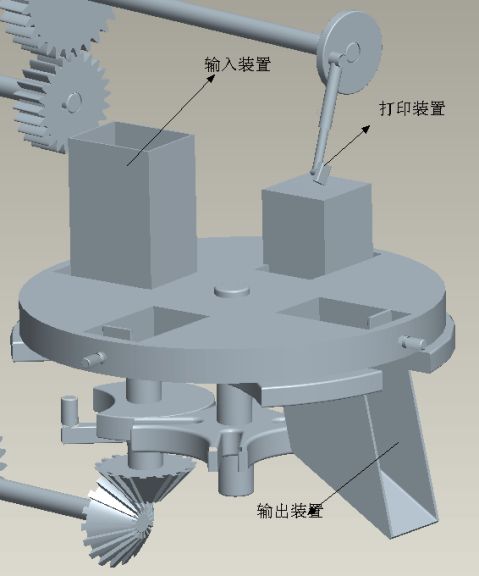
二. 课程设计任务——自动打印机
1. 工作原理及工艺动作过程
在某商品包装好的纸盒上,为了某种需要而在商品上打印一种记号。它的主要动作有三个:送料到达打印工位,然后打印记号,最后将产品输出。
2.原始数据和设计要求
(1)纸盒尺寸:长100~150mm、宽70~100mm、高30~50mm。
(2)产品重量:5~10N;
(3)自动打印机的生产率:80次/min;
(4)要求机构的结构简单紧凑、运动灵活可靠、易于制造加工。
3.设计方案提示
(1)从结构简化考虑将送料——夹紧机构合为一体,可以采用凸轮机构或有一定间歇运动的连杆机构。
2)打印机构可以采用平面连杆机构凸轮机构。
3)输出机构可以采用连杆机构或凸轮机构。
4)由于定位夹紧时在送料方向有一挡块,从结构简化考虑,输出运动可与送料运动的方向互相垂直。如何使三个执行机构的原动机在一根主轴上是需要认真考虑的。
4
三.课程任务设计分析
自动打印机的工作主要有三个步骤,即送料到打印台,打印商标,将打印好的商品送出,进行下个商品的打印。
考虑到商品的尺寸有不确定性,所以我们必须要考虑到对不同大小的商品要有精确地定位和打印头的长度,对于不同的商品有不同的调节来进行定位打印。
四.机构运动的构思与设计
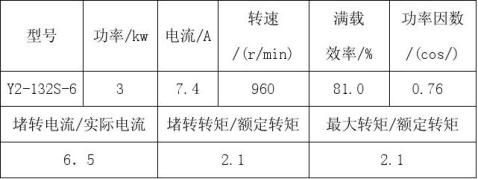
1.电动机的选择
选择的电动机的额定功率必须满足负载要求,而且必须保证在启动时可以顺利地运行。根据设计任务要求每分钟必须完成80个零件(80次/min),那么就要求我们对电动机必须要减速,所以我们选择的电动机的转速不能太高,否则在减速过程中会带来不必要的麻烦,造成机械传动系统的过分庞大和制造成本的显著增加。通过查阅资料,转速选择960r/min较为适合,可以保证运行的稳定性,另外
5
转速也不太高,传动比也较为容易计算(i=960/80=12/1)。经过多方面的考虑我选960转/min的电动机。型号为Y2-132S-6
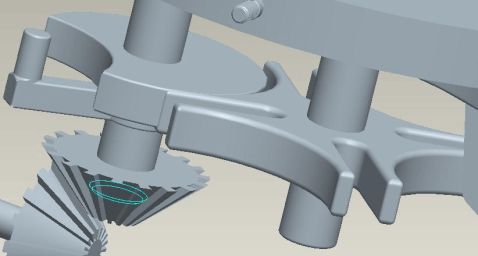
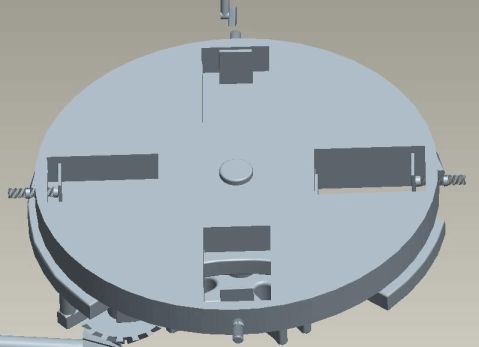
2.自动送料功能
自动送料功能采用有间歇运动的槽轮机构来实现。

CAD二维图
6
Pro/E三维立体图
槽轮机构的间歇运动可以有效的实现送料到工作台上,打印头的正下方,等待的打印头的打印。打印结束后又可以将商品有效的撤离打印工作台,最终实现送料———打印———输出。
由于打印机需要完成对不同尺寸商品都进行打印的功能,所以就必须考虑对不同尺寸的商品进行定位。我们把统一尺寸的商品分成一类,同一类商品一次打印完,对打印机只需进行一次调整。设计了如下的定位:
7
Pro/E
对于不同尺寸的商品,我们首先将商品进行分类,将同一尺寸的商品分成一类,然后再按分类打印商标。同一尺寸的商品只需要进行一次调整定位即可。即在未打印时将商品放在打印台上,调整打印台上的挡板,将商品夹持稳,但不要紧夹持住商品,否则打印完后不能将商品正常输出和下一次打印时商品不能正确到达打印工作台上。 三维立体图
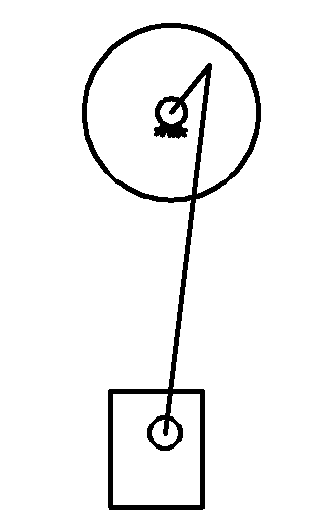
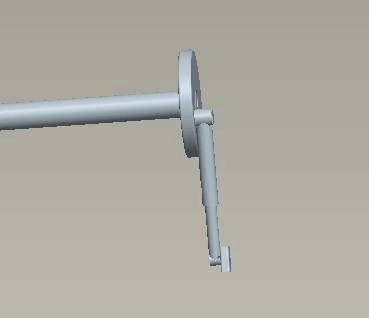
3.自动打印功能
自动打印功能采用偏心轮装置来实现。
8
Pro/E三维立体图
打印装置
9
考虑到商品的高度有所不一致,所以打印头的连杆设计成伸缩式的,可以根据商品的高度来调节打印杆的长度。如图:
Pro/E三维立体图
对于不同尺寸的商品,它的高度不一致,将打印连接杆设计成伸缩式的,可以对不同尺寸的商品进行调整。通过螺钉来固定伸缩杆的位置,调整后只要将螺钉拧紧,就可以固定打印头打印商标。
10
4.自动输出功能
商品自身所具有的重力功能,当商品转到没有底板支撑时,商品就会自动掉出,进入到商品输出槽中,最终输送出打印机。如下图:
Pro/E三维立体图
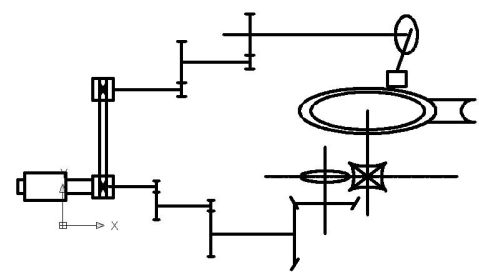
五.整体设计方案运动简图
1.工作原理:
打印头的工作:电机转动,通过两条V带传动,带动减速齿轮减速,减速齿轮带动偏心轮转动后,偏心轮就带动打印头做上下移 11
动,实现打印功能。
工作台的工作:另一轴的转动通过减速就带动槽轮机构做间歇运动,带动工作台做间歇转动,间歇转动过程中就有转动———停止,在停止时工作台上的商品加紧位置刚好在商品进输入的正下方,商品通过它自身的重力自动调入工作台的加紧装置中。然后由槽轮机构转动就带动工作台和商品一起转动到打印头的正下方。打印头刚好向下运动,将商标打印在商品上。打印头向上运动,脱离商品。此时,另一工作加紧槽也刚好转入到商品输入的正下方,商品自动掉入到工作槽中。再由槽轮机构的转动将打好商标的商品转出打印头的下方,进入到输出装置中。由商品自身的重力自动的调入到商品输出槽中,由输出槽将打印好商标的商品输出。此时,后一工作台上的商品也转入到了打印头的正下方,又进入到工作台的打印,重复上一个工作过程,最终实现商品商标的自动打印功能。
12
13
CAD二维运动简图
14
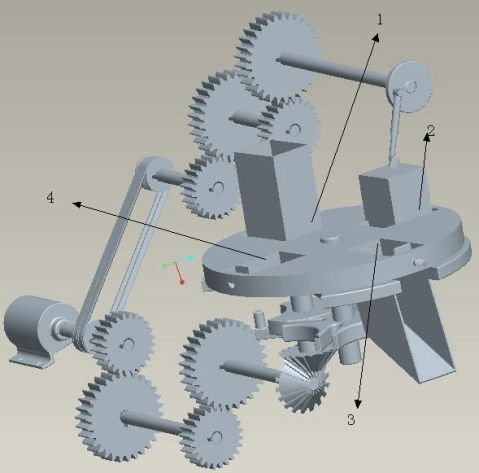
Pro/E三维立体图
1,2,3,4分别表示四个工作工位,对应工作运动循环图解中的1,2,3,4
运动循环图解
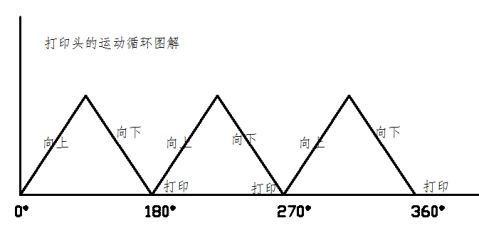
15
注:图解是从打印机开始时表示的,只表示槽轮机构只是转动360度的打印过程。“无”表示没有商品在上面。当进行下一个过程是就全部工位都在工作中。
六.方案设计的比较
方案一
16

图(a)
优点:机构紧凑,使传动效率增大,由于机构的紧凑性,减少了占地面积,圆盘式的传动式送料更为平稳。
缺点:槽轮机构的配合要求较高。
17
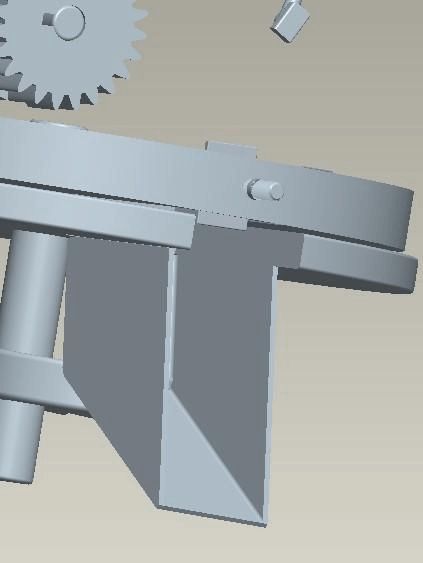
方案二
如图(6)所示为整体设计方案的三维机械运动图。电机转动,通过带传动传给两个主轴,再通过减速器进行相应的减速。蜗杆带动涡轮转动,曲柄摇杆机构附在涡轮上,当曲柄滑块机构运动到最左端时纸盒由送料口进入到滑槽中,曲柄转动带滑块向右推动,将纸盒送到指定位置,此时盖头正好朝下打印标记,与此同时三角形物块朝上对纸盒进行固定。曲柄滑块回转,盖头朝上,三角形物块朝下,下一个纸盒送过来时将上一个已完成打印的纸盒推出,纸盒由出料口被送出,完成一次工作。如此往复运动,就能实现目的。
优点:用凸轮和连杆机构传动易实现运动规律,能够达到运动多的要求,对经济方面也比较便宜。
18
缺点:凸轮易磨损,常久使用会使打印精度降低。
最终方案:综合经济方面的考虑,选择方案二。
七.设计心得体会
通过本次机械原理课程设计,将理论付诸实践是本次课程设计中我得到的最大收获,以往的学习中,我们只是学学理论记一记公 式,然后做些传统的题目,这样的学习考完试后就会把知识遗忘。设计机构之初,脑中有许多构想,然而落实到纸上发现很多机构的自由度都不为1,这使我明白了结合理论的重要性,在确定传动比和减速机构时亦是如此。
在设计中需要用到cad制图、机械制图和 Pro/E等几门学科的知识,将所学知识相结合,将知识点编织成知识网也让我对机械学科有了横向的认识。本次设计以小组为单位,增进了同学自己彼此的了解,使我们学会团队之间的合作,受益终生。
总之,几个星期的课程设计使我对机械学科有了更深刻的了解与认知。这些都为我今后的学习和工作奠定了踏实的基础,为成为一名合格的机械师迈出了重要的一步。
19
八.参考文献
1.机械原理课程设计手册(第二版) 主编 邹慧君 张青 高等教育出版社
2.机械原理(第七版) 主编 孙桓 陈作模 高等教育出版社
3. 机械原理课程设计指导书
出版社
主编 张小玲 北京航空大学20