桂林理工大学博文管理学院 实验名称:
专业班级:
学生姓名:
指导老师:
实验时间: 实验报告 SIMULINK基本模块的应用 通信工程12-2班 韦建萍 学号: 12090216 邓怡辰 2015 年 10 月 15 日
实验二
题目:SIMULINK 基本模块的使用
预习指导:
实验目的:学习SIMULINK基本模块的使用和仿真参数设置。
实验要求:学会使用SIMULINK 的基本摸块:信号发生器,数学模块,示波器,应用这些模块构建基本的通信系统模型,并进行仿真验证。 实验内容:
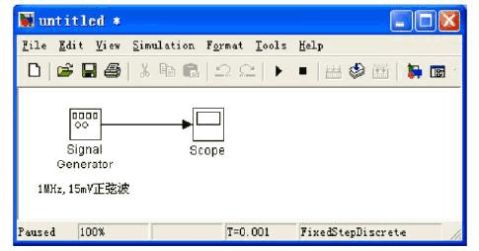
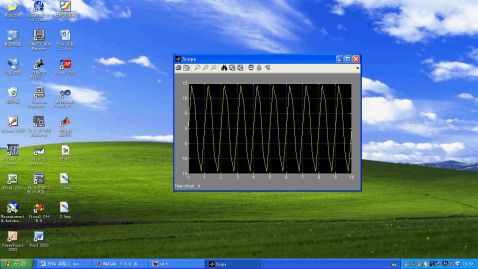
( 1 )用信号发生器产生1MHz ,幅度为15mV 的正弦波和方波信号,并通过示波器观察波形。注意设置仿真参数和示波器的扫描参数和幅度显示参数。使得示波器能够显示10个正弦波周期。
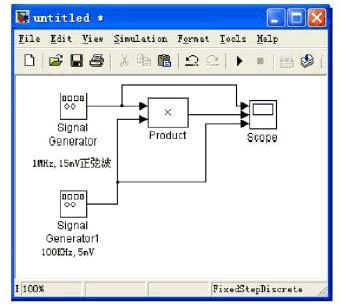
( 2 )通过示波器观察1MHz , 幅度为15mV 的正弦波和100KHz ,幅度为5mV的正弦波相乘的结果写出数学表达式.
通过使用三踪示波器同时观察1MHZ 、100KHz 正弦波以及相乘的结果。注意设置仿真参数和示波器的扫描参数和幅度显示参数。
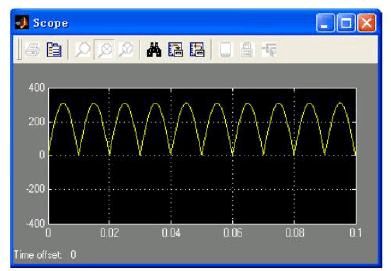
( 3 )将50Hz ,有效值为220V的正弦交流电信号通过全波整流(绝对值
)模块,观察输出波形。
注意:有效值为220V的正弦信号的振幅是多少?
( 4 )通过m 语言编程来得刻(2 )、(3 )的波形,用Plot 语句作出波形图。给出程序。
( 5 )学有余力的司学,可自行对两信号的相加,相减以及其它数学运算模块进行实验.
思考题:
1 .你认为SIMULINK 仿真和m 语言编程仿真的各自特点和优点是那些? 答:SIMULINK 仿真特点和有优点:使用定步长或变步长运行仿真,根据仿真模式(Normal,Accelerator,Rapid Accelerator)来决定以解释性的方式运行或以编译C代码的形式来运行模型;图形化的调试器和剖析器来检查仿真结果,诊断设计的性能和异常行为;可访问MATLAB从而对结果进行分析与可视化,定制建模环境,定义信号参数和测试数据;模型分析和诊断工具来保证模型的一致性,确定模型中的错误。
m 语言编程仿真的特点和优点:一种演算纸方式的编程语言。通过这种语言,用户可以用类似于数学公式的方式来编写算法,大大降低了编程所需的难度并节省了时间,从而让用户把主要的精力集中在算法的构思而不是编程上。
2 .叙述计算机伪真的基本步骤。
答:建立模型、仿真实验、数据处理、分析验证等步骤。
实验总结:
本实验研究了Matlab在通信系统中的应用,我了解了通信原理中各种调制方法及简单通信系统的Matlab编程实现,并学习了Matlab与Simulink的混合编程,对子系统的封装,加深了对专业知识的理解。通过本次课程实践,我并掌握了Matlab基本使用方法,也基本掌握了Matlab的程序设计方法,并了解了Matlab在今后的课程学习和工程研究中的应用方法。然而在本次上机实践中,也存在着一定的不足,而且我认识到Matlab只是一个工具和帮手,只有具有扎实的专业基础,并通过Matlab加以巩固,才能取得良好的效果,而Matlab强大的功能则需要今后更加努力的学习。
第二篇:[四川大学]SIMULINK仿真实验(cad第二次实验报告)
SIMULINK仿真实验
实验报告
1. 建立单位负反馈二阶系统的SIMULINK仿真模型,当输入信号源分别为阶跃信号、斜坡信号、抛物线信号、正弦信号时,给出系统输出的波形图
(1) 开环传递函数如下所示

(2) 将(1)中的开环传递函数转换为状态空间模型
将开环传递函数转换为状态空间模型
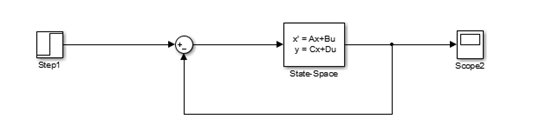
(1)SIMULINK仿真模型
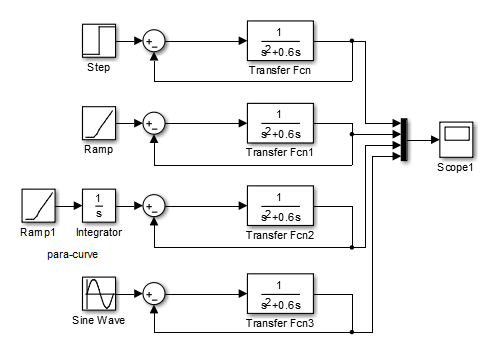
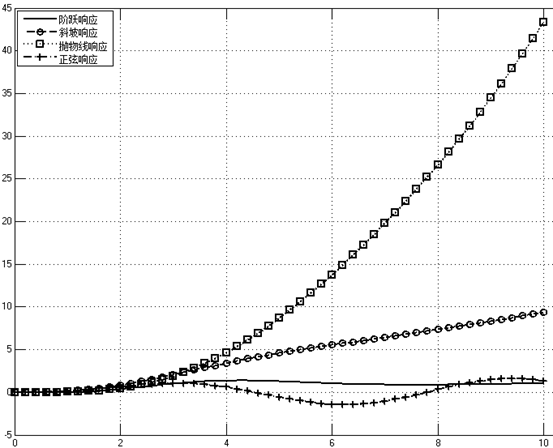
可以看到,该系统可以无稳态误差跟踪阶跃信号,跟踪斜坡信号时有一定的稳态误差(在10s以后),对于阶次更高的抛物线信号无法跟踪,响应最终发散;同样,系统参考输入为周期变化的正弦信号时,响应也呈周期性振荡。
(2)
num=[1];
den=[1,0.6,0];
[A,B,C,D]=tf2ss(num,den)
A =
-0.6000 0
1.0000 0
B =
1
0
C =
0 1
D =
0
1. 系统的微分方程为:
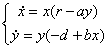
设r=1,d=0.5,a=0.1,b=0.02,x(0)=25,y(0)=2
i. 利用MATLAB所提供的函数,编写求解上述微分方程的M文件,求出x(t),y(t);
ii. 试建立系统的SIMULINK模型,并给出x(t),y(t)的曲线波形,
iii. 比较上面两种方法的结果
求解x(t),y(t)
程序清单:
%OdeFun1.m,令x(t)=Y(1),y(t)=Y(2)
%DY(1),DY(2)分别为x(t),y(t)的一阶微分
function DY=OdeFun1(t,Y)
DY=zeros(2,1);
DY(1)=Y(1)*(1-0.1*Y(2));
DY(2)=Y(2)*((-0.5)+0.02*Y(1));
%在command windows 中输入以下语句,画出x(t)-t
%y(t)-t
[t,Y]=ode45('OdeFun1',[0 50],[25;2])%给出所用的函数,计算时间[0,50] %以及初值
plot(t,Y(:,1),'-',t,Y(:,2),'-.')
运行结果:
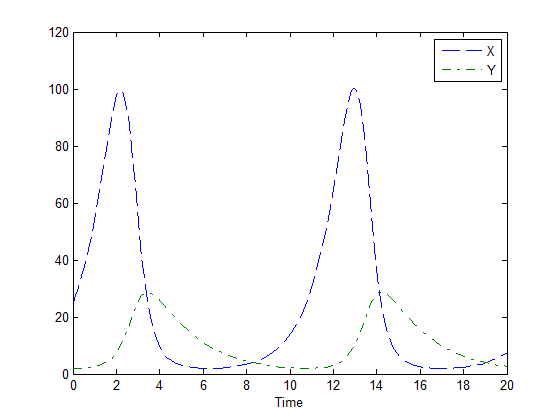
利用simulink模型求解x(t),y(t)
模型:
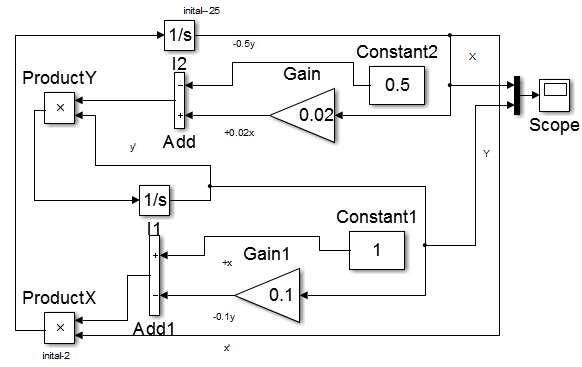
运行结果:
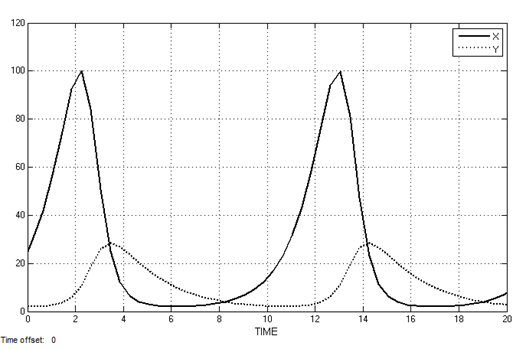
比较两种方法的结果:这两种方法得出结果的算法都是非刚性的ode45算法,所以得出的结果基本上是一样的,不过用simulink模型可以对求解过程更容易地做更多地设置,比如设置求解的步长,误差的容忍度和求解的时间(用Odefun也是可以完成的);虽然用simulink模型可以更多地设置求解的内容,但是一旦微分方程组被修改,模型又必须重建,因此在要求不多时用odefun直接求解更方便。
2. 蹦极跳的数学模型为:

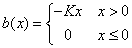
其中m为物体的质量,g为重力加速度,x为物体的位置,第二项表示绳索的弹力,K为绳索的弹性系数,第三项和第四项表示空气的阻力。
设蹦极者的初始位置为x(0)= -30, 起始速度为 x(0)'=0; 其余的参数为a1=a2=1, m=70mg, g=10m/s2. 试建立系统的SIMULINK模型,并给出x(t),x'(t)的曲线波形
建立simulink 模型
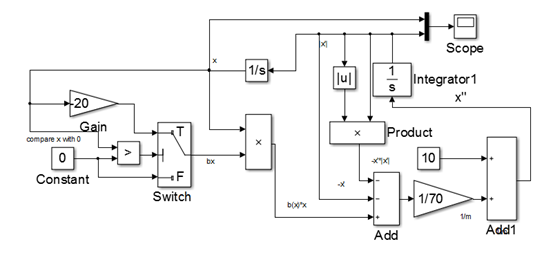
运行结果:
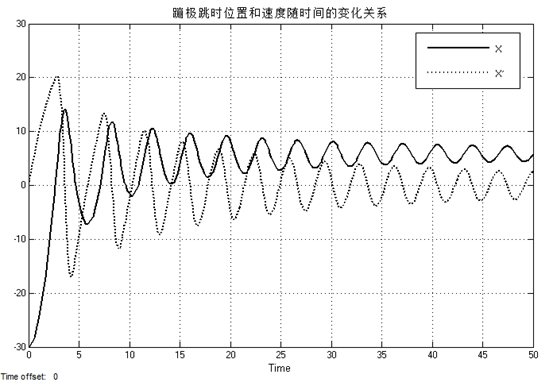
可以看到,蹦极跳过程是一个能量(振幅,加速度)振荡衰减的过程,在暂态过程中,速度的变化落后位置的变化大约半个周期(速度曲线的波峰对应位置曲线的波谷),而且平衡位置(0)时的速度曲线斜率——加速度最小。这些符合对弹性系统的受力分析结果。
4.建立单闭环调速系统的SIMULINK模型,并对PID控制器进行封装和对P,I,D参数进行设置
建立simulink模型
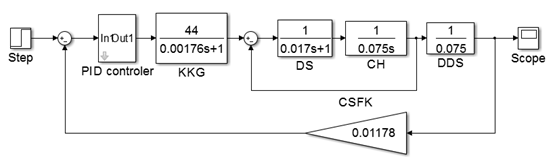
运行结果
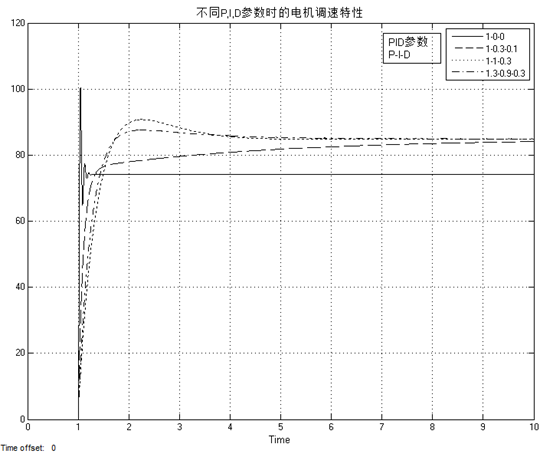
从PID为1-0-0开始整定,PID为1-0-0时,电机超调很大而且有较大的稳态误差,所以加入积分微分调节(只加入积分调节难以降低超调量),将参数改为1-0.3-0.1,得到的曲线虽然没有超调现象,但非周期相应调节时间较长。为了让系统更迅速的反应偏差,加大微分环节同时加强积分环节,第三条曲线出现超调,调节时间也明显小于第二条曲线,最后一条曲线尝试着增大比例环节同时增大积分和微分,得到了一条超调小,调节时间较短的曲线。