实验报告2
――光电传感器测距功能测试
1. 实验目的:
Ø 了解光电传感器测距的特性曲线;
Ø 掌握LEGO基本模型的搭建;
Ø 熟练掌握ROBOLAB软件;
2. 实验要求:
能够用LEGO积木搭建小车模式,并在车头安置光电传感器。能在光电传感器紧贴红板,以垂直红板的方向作匀速直线倒车运动过程中进行光强值采集,绘制出时间-光强曲线,然后推导出位移-光强曲线及方程。
3. 程序设计:
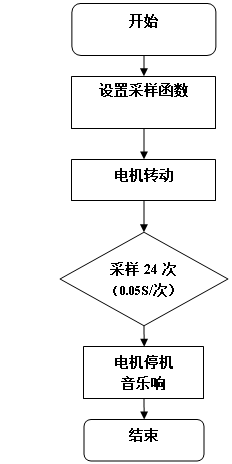
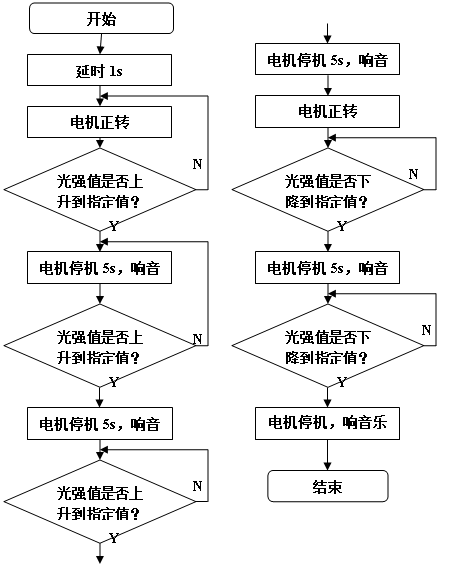
编写程序流程图并写出程序,如下所示:
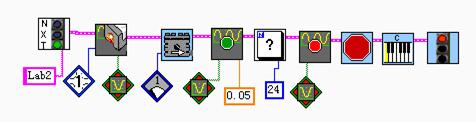
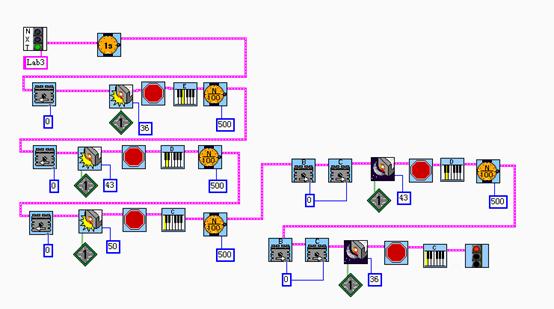
ROBOLAB程序设计:
4. 实验步骤:
1) 搭建小车模型,参考附录步骤或自行设计(创新可加分)。
2) 用ROBOLAB编写上述程序。
3) 将小车与电脑用USB数据线连接,并打开NXT的电源。点击ROBOLAB的RUN按钮,传送程序。
4) 取一红颜色的纸板(或其他红板)竖直摆放,并在桌面平面与纸板垂直方向放置直尺,用于记录小车行走的位移。
5) 将小车的光电传感器紧贴红板放置,用电脑或NXT的红色按钮启动小车,进行光强信号的采样。从直尺上读取小车的位移。
6) 待小车发出音乐后,点击ROBOLAB的数据采集按钮,进行数据采集,将数据放入红色容器。共进行四次数据采集。
7) 点击ROBOLAB的计算按钮,分别对四次采集的数据进行同时显示、平均线及拟和线处理。
8) 利用数据处理结果及图表,得出时间同光强的对应关系。再利用小车位移同时间的关系(近似为匀速直线运动),推导出小车位移同光强的关系表达式。
5. 调试与分析
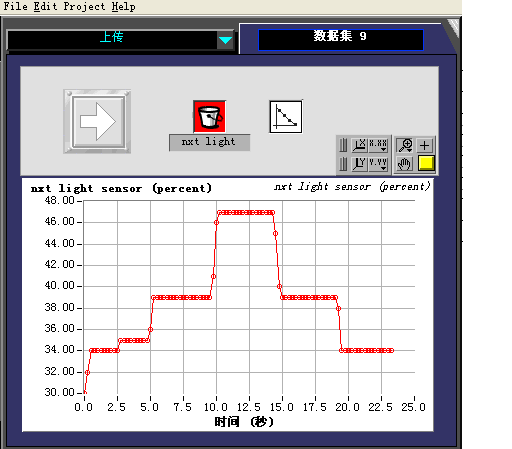
a) 采样次数设为24,采样间隔为0.05s,共运行1.2s。采得数据如下所示。
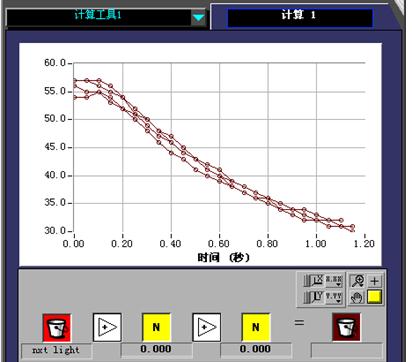
b) 在ROBOLAB的数据计算工具中得到平均后的光电传感器特性曲线,如图所示:
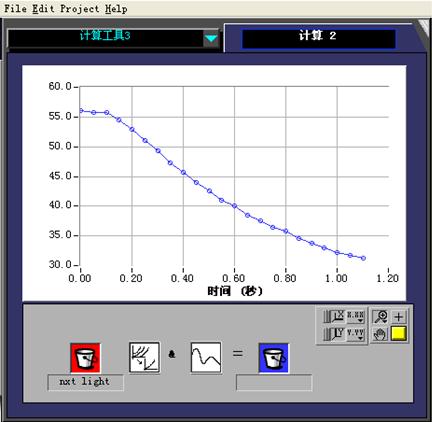
c) 对上述平均值曲线进行线性拟合,得到的光强与时间的线性拟合函数:
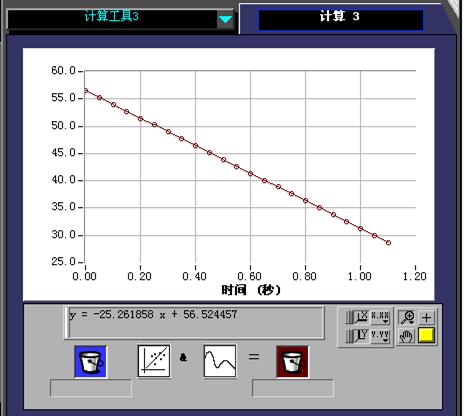
d) 取四次实验小车位移的平均值,根据时间与光强的拟合函数求取距离与光强的拟合函数:
由上图可得光强与时间的关系为:y= -25.261858×t+56.524457 ;
量取位移为4.5cm,用时1.2s,得:x=3.75×t ;
光强与位移的关系为:y= -6.73649547×x+56.524457 ;
e) 通过观测上图及导出的光强位移函数可知,光电传感器在短距离里内对位移信号有着良好的线性关系,可以利用光强值进行位移控制。但我们也可以发现,其线性区域十分狭窄,从图中可看出,主要集中在0.1s到0.8s之间。故只能用于短距离测控。
6. 注意事项:
l 光电传感器对环境光较为敏感,故应采用一定的遮光措施,使环境尽量的暗,增大光强变化范围,提高定位准确度。另外,采用光电传感器的自身光源,最大限度的减少环境光对实验的不利影响。
l 小车在行进之中,并不能保证轨迹完全与红板垂直,可以采取固定后轮的方式,强制小车直线运动。
l 由于光电传感器的自身光源为红色光,故采用红板反射效果最好。在同等条件下,白板的反射光强曲线较陡。
l 由于线性区域很窄,故只用低速档并可以考虑采用齿轮减速机构,使速度尽量的慢,得到较为理想的曲线。
7. 实验总结:
通过这次实验,我们看到光电传感器的另一种功能,在短距离内的测距功能。但我们也看到,这种工作方式容易受环境的影响,产生较大的误差。另外,它也只适合于短距离的测量,这是由于其与位移的线性关系决定的。最后,这次实验也为下次实验提供了理论支撑和相关数据的确定。
注:小车的搭建过程详细请见9797套装手册
附图:小车模型

实验示意图


齿轮减速机构(右图为拆去轮子后)
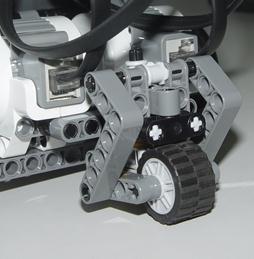

后轮固定机构
实验报告3
-—光电传感器位移传感应用
1. 实验目的:
Ø 掌握利用光感的局部线性特征进行测距的方法
2. 实验要求:
小车由出发点向障碍物方向匀速行进,距离3CM、2CM、1CM时各停止5秒钟并以不同音调提示到达指定位置。回程亦然并停止在3CM位置。测量小车到达各目标位置的实际位置。重复实验三次并记录相关数据。
3. 软件设计:
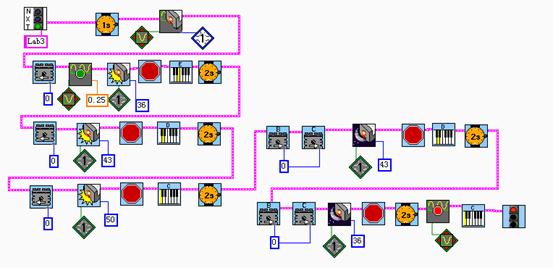
编写程序流程图并写出程序,如下所示:
ROBOLAB程序设计:
4. 实验步骤:
1) 搭建小车模型,参考附录步骤或自行设计(创新可加分)。
2) 用ROBOLAB编写上述程序(控制阈值需要修改)。
3) 将小车与电脑用USB数据线连接,并打开NXT的电源。点击ROBOLAB的RUN按钮,下载程序。
4) 取一红颜色的纸板(或其他红板)竖直摆放,并在桌面平面与纸板垂直方向放置直尺,用于记录小车与红板之间的距离。
5) 将小车的正对红板放置,与红板距离约为4cm。用电脑或NXT的红色按钮启动小车。每逢小车停顿,从直尺上读取小车的位移。重复三次。
6) 将记录的数据记录在自制的表格中。(可以用办公软件绘制表格和图形)
5. 调试与分析
a) 利用上次实验推导出光强与位移的方程:
y= -6.73649547×x+56.524457
得出: x=1cm时, y=49.8611≈50 ;
x=2cm时, y=43.16889≈43 ;
x=3cm时, y=36.46665≈36 ;
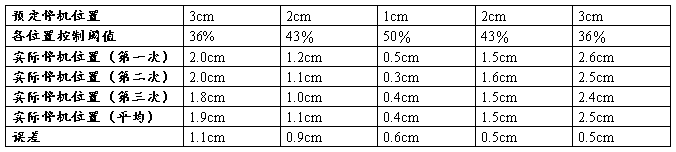
b) 利用上述数据进行程序设置,虽然小车能够按要求在不同的距离停顿,但与我们所设的位置有较大误差,特别是回程的时候。这是由于拟和的函数本身就存在误差,再加上环境的影响,故实现起来有较大的误差。
c) 记录的实验数据:
d) 为更好的进行程序调试,故改进程序如下,加入光电感应器的数据采集:
e) 运行程序,得到下图:
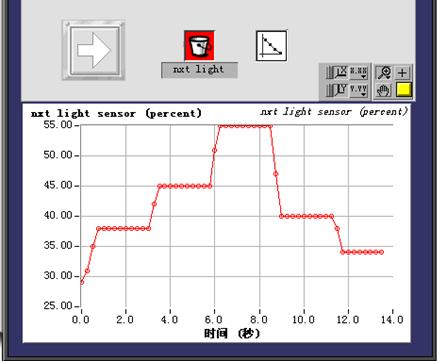
f) 观测上图,可以发现小车并未在我们设定的控制阈值处停顿。在向前运动中,停顿位置的实际光强值比预设的大。而在回程中,停顿位置的光强值比我们预设的小,故可以推测由于小车的惯性及电机自身的因素,产生了控制误差。另外,我们可以从图表中读出停顿位置的实际光强值,故可以根据现场情况,调整控制阈值,达到较好的控制效果。
g) 根据现场情况调整控制阈值后的记录表格:
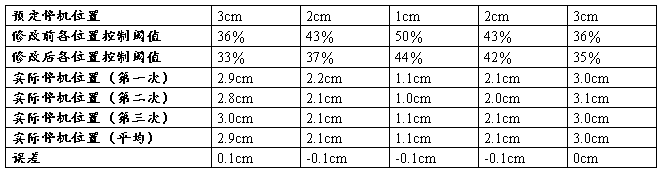
h) 调整控制阈值后采集的数据:
i) 根据上图可以发现,小车实际停顿位置的光强值为34,39,47。将这些数据代入上次实验得出的方程,发现处在这些光强之下的位移都比预计值大,说明上一个实验得出的方程存在误差,把一开始的加速运动简化为匀速直线运动处理所产生的。
6. 注意事项:
l 光电传感器对环境光较为敏感,故应采用一定的遮光措施,使环境尽量的暗,增大光强变化范围,提高定位准确度。另外,本实验采用光电传感器的自身光源,最大限度的减少环境光对实验的不利影响。
l 小车在行进之中,并不能保证轨迹完全与红板垂直,可以采取固定后轮的方式,强制小车直线运动。
l 由于光电传感器的自身光源为红色光,故采用红板反射效果最好。在同等条件下,白板的反射光强曲线较陡。
l 由于控制的位移很小,故尽量采用低速档及齿轮减速机构,使速度尽量的慢。另外一开始摆放的距离也不宜太大,尽量减小惯性,才能得到较为精确的控制。
l 读取直尺数值时尽量保持以垂直桌面的角度,减小误差。
7. 实验总结:
通过这次实验,我们看到利用光电传感器,可以实现短距离的较为精确的位移控制。但由于受环境光,以及小车的惯性等因素的影响,利用上次实验拟和的位移-光强曲线函数虽然实现不同距离停顿的功能,但与预定值有着较大的误差。故可以考虑现场采集光强值的方式,以上次实验计算出的控制阈值作为初始值,通过多次试验进行校正,最后达到较为理想的位置控制。
另外,从直尺上读取小车的位移值时,从不同的角度读取值不一样,易引入误差。故可以考虑在车轮上直接绘制标尺的方式或改用角度传感器反馈的方式来进行位移值的读取。
注:小车的搭建过程详细请见9797套装手册
附图:小车模型——请参见实验2的附图
第二篇:虚拟仪器实验报告3
虚拟仪器实验报告
导师:冯雯岚
实验一 电涡流开关铁磁性物体检测实验
一. 实验目的
1. 通过本实验熟悉电涡流传感器的工作原理。
2. 通过本实验了解和掌握采用LDG-12-A型电涡流传感器进行铁磁性物体检测实验的原理和方法。
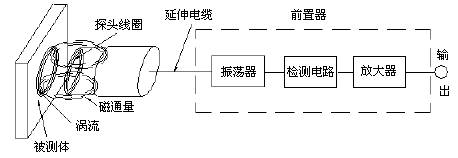
二. 实验原理
涡流传感器是一种非接触式传感器,一般由探头、延伸电缆、前置器构成基本的工作系统(如图24.1所示)。前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。如果在这一交变磁场的有效范围内没有金属材料靠近,则这一磁场能量会全部损失;当有被测金属体靠近这一磁场,则在此金属表面产生感应电流,电磁学上称之为电涡流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。通常我们能做到控制τ, ξ, б, I, ω这几个参数在一定范围内不变,则线圈的特征阻抗Z就成为距离D的单值函数,虽然它整个函数是一非线性的,其函数特征为“S”型曲线,但可以选取它近似为线性的一段。于此,通过前置器电子线路的处理,将线圈阻抗Z的变化,即头部体线圈与金属导体的距离D的变化转化成电压或电流的变化。输出信号的大小随探头到被测体表面之间的间距而变化,电涡流传感器就是根据这一原理实现对金属物体的位移、振动等参数的测量。
三. 实验仪器和设备
1. 输送线实验台架(LCSX-12-A) 1套
2. 电涡流传感器(LDG-12-A) 1套
3. 蓝津数据采集仪(LDAQ-EPP2) 1套
4. 开关电源(LDY-A) 1套
5. 传感器支架(LZJ-A) 若干
6. 铁性试件 若干
7. 个人计算机 n台

四.实验结果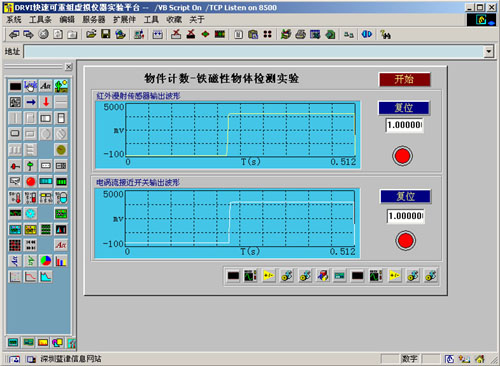
五.思考题
1. 该实验还可以采用其它哪些传感器进行?
答:霍尔元件。
2. 调整传感器的位置(与被测物体的距离)后,输出信号有何变化?与其工作原理相符吗?答:与被测物体的距离减小时,输出信号放大,反之,则变小。
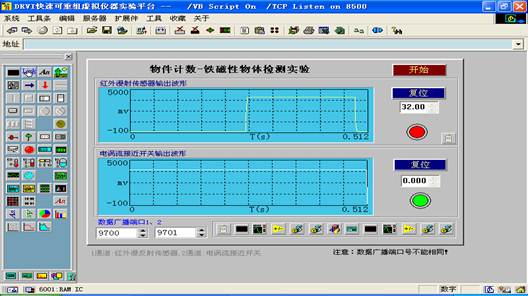
实验二 红外传感器产品计数实验
一. 实验目的
1. 通过本实验熟悉光电传感器的工作原理。
2. 通过本实验了解和掌握采用LHF-12-A型红外传感器进行物件计数实验的原理和方法。
二. 实验原理
光电测量方法灵活多样,可测参数众多,一般情况下又具有非接触、高精度、高分辨率、高可靠性和响应快等优点,加之激光光源、光栅、光学码盘、CCD器件、光导纤维等的相继出现和成功应用,使得光电传感器在检测和控制领域得到了广泛的应用。光电传感器在工业上的应用可归纳为吸收式、遮光式、反射式、辐射式四种基本形式。其中反射式原理如图所示。
本实验所采用的LHF-12-A型红外光电传感器属于反射性传感器,在同一壳体内装有发射器和接受器,此外配有一块特殊的反射板,使从发射器里发出的光线能反射到接受器表面。当被测物遮住光线,传感器就开始工作,实现了开关功能。在正常状态下(没有物体通过),传感器输出为一定值,当有物体通过时,由于光线被遮断,传感器输出发生跳变,由数据采集仪获得后,通过DRVI快速可重组虚拟仪器平台的脚本就可以实现物件计数。
三. 实验仪器和设备
1. 输送线实验台架(LCSX-12-A) 1套
2. 红外反射式传感器(LHF-12-A) 1套
3. 蓝津数据采集仪(LDAQ-EPP2) 1套
4. 开关电源(LDY-A) 1套
5. 传感器支架(LZJ-A) 若干
6. 个人计算机 n台
四、实验结果
五. 思考题
1.产品计数实验还可以采用其它哪些传感器进行?各有什么特点?
答:还可以用涡流传感器,只能检测铁磁性物体个数;
还可以用光电传感器,用于检测能反射光的产品个数。
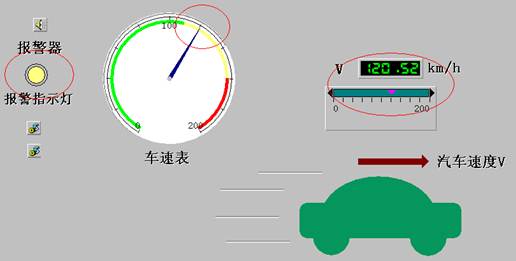
自主实验
—汽车速度检测系统
1 实验步骤以及内容(以下是设计好的界面)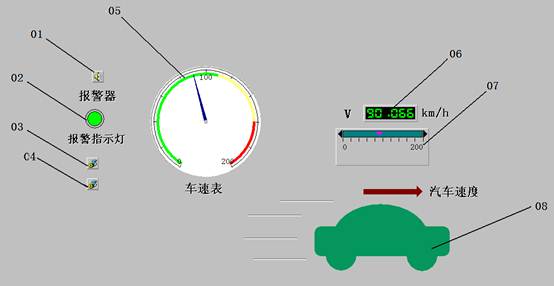
01:报警器 驱动线号是104
02:报警指示灯IC 驱动线号是102
03:程序编译器1 用以控制02 驱动线号是100
04:程序编译器2 用以控制01 驱动线号是100
05:车速显示表(圆形表头IC) 驱动线号100
06:数码LED_IC 用以显示车速值 驱动线号100
07:水平滚动条IC 用以控制车速值 驱动线号100
08:小车的图形
实验程序
03 控制报警指示灯
<VBSCRIPT>
Rem Write VBScript Here
Dim v
v=Getline(100)
If v<110 Then
Setline 102,0
Else
If v<160 Then
Setline 102,1
Else
Setline 102,2
End If
End If
04 控制报警器
<VBSCRIPT>
Rem Write VBScript Here
Dim v
v=Getline(100)
If v<160 Then
Setline 104,0
Else
Setline 104,1
End If
2实验的目的以及结果
实验目的:
高速公路上事故频发,其中很大一部分原因就是司机没有按规定驾车行驶,比如超速就会引发很多事故。基于这个原因,我们设计了一款汽车限速报警装置。我们希望通过报警灯和报警器来提醒司机驾驶过程超速。
实验结果:
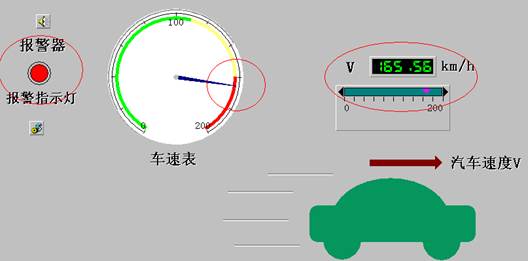
1 当我们把速度调到90.066km/h,这时是安全行驶,指示灯为绿色,报警器不响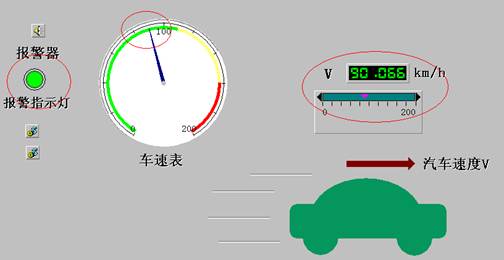
2 当我们把速度调到120.52km/h,这时是超速行驶,指示灯为黄色,报警器不响
2 当我们把速度调到165.56km/h,这时是超速行驶,指示灯为红色,报警器响起
实验心得
经过了为期四周的虚拟仪器实验后,我对虚拟仪器的组成、原理及特点有了一定的了解。它是一门综合应用相关课程的知识和内容来解决科研、生产、国防建设乃至人类生活所面临的测试问题的课程。
在做实验前,一定要将课本上的知识吃透,因为这是做实验的基础,否则在老师讲解时就会听不懂,这将使你在做实验时的难度加大,浪费做实验的宝贵时间。比如做应变片的实验,你要清楚电桥的各种接法,如果你不清楚,在做实验时才去摸索,这将使你极大地浪费时间,使你事倍功半。做实验时,一定要亲力亲为,务必要将每个步骤,每个细节弄清楚,弄明白。实验后,还要复习,思考,这样,你的印象才深刻,记得才牢固,否则,过后不久你就会忘得一干二净,这还不如不做。做实验时,老师还会根据自己的亲身体会,将一些课本上没有的知识教给我们,拓宽我们的眼界,使我们认识到这门课程在生活中的应用是那么的广泛。
而后面几周是做自主实验。在自主实验中基础很重要,需要对虚拟仪器的组成、原理及特点了解了,才能自己去做实验。此外必须要结合实际生活,要会从生活中发现问题,并主动去了解问题发生的原因,寻找突破口,只有这样才能够真正解决问题。