简易智能小车
摘要:本系统基于自动控制原理,以MSP430为控制核心,用红外传感器、光敏三极管、霍尔传感器、接近开关之间相互配合,实现了小车的智能化,小车完成了自动寻迹、避障、寻光入库、计时、铁片检测、行程测量的功能。本系统采用液晶LCD12864显示数据,良好的人机交流界面,显示小车行程的时间、铁片中心线离起始线的距离和铁片的个数。整个系统控制灵活,反应灵敏。
关键词:MSP430 传感器 LCD12864
目录
一、 方案论证与比较... 3
1、题目任务要求及相关指标的分析... 3
2、方案的比较与选择... 3
(1)控制单元的选择... 3
(2)直流电机驱动电路的选择... 3
(3)轨迹探测模块选择... 3
(4)金属片的探测... 3
(5)路程测量方案的选择... 4
(6)避障方案的选择... 4
(7)小车寻光方案的选择... 4
(8)电源的选择... 4
(9)刹车机构功能方案比较... 5
二、系统总体设计方案及实现方框图... 5
1、系统总体设计方案... 5
2、系统实现框图... 5
三、理论分析与计算... 5
1、铁片中心线距离的测量... 5
2、小车行程时间的测量... 5
四、主要功能电路设计... 6
1、小车循迹模块... 6
2、小车检测铁片模块... 6
3、小车测距模块... 6
4、小车避障模块... 6
5、小车寻光模块... 6
6、直流电机驱动模块... 7
五、系统软件的设计... 8
六、测试量数据与分析... 8
1、测量数据... 8
2、数据分析... 8
参考文献... 8
一、 方案论证与比较
1.题目任务要求及相关指标的分析
题目要求小车按照规定的跑道行驶,同时检测在跑道下的铁片,在检测到最后一块铁片时小车会有连续的声光显示;后又可以准确的避开障碍,而且不与障碍物接触;最后,在光源的引导下,进入车库。智能小车有显示功能,可以显示检测到铁片的数量,金属片距起点的距离,行驶的总时间。整个行驶过程中的总时间不大于90秒,小车在行驶90秒后会自动停车。
2. 方案的比较与选择
(1)控制单元的选择
方案一:利用单片机与FPGA配合使用。基于FPGA I/O口数量多以及运算速度快的特点,对各种传感器得到的信号进行处理,将处理结果交予单片机,从而由单片机控制小车的行驶。
方案二:利用TI的单片机MSP430,该芯片集成了模拟电路、数字电路、微处理器,具有AD采样、比较器、产生PWM控制信号,掉电可以继续复位工作等功能。此外,MSP430有众多的I/O口,可以很好的实现对小车的控制。
由于FPGA太大,不宜装在小车上,并且FPGA不好供电。题目对小车的实时性要求不是很高,所以我们所需要的控制单元不必要具备很高的运算速度,故两种方案都可以很好的实现题目的要求。出于对成本和功耗的考虑,我们采用方案二。
(2)直流电机驱动电路的选择
方案一:采用H型桥式驱动电路。直流电机驱动使用最广泛的是H型桥式驱动电路,这种电机可以很方便的实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。但是使用时需要注意直通短路,这给电路带来了不稳定因素。
方案二:利用驱动专用芯片L298。L298是集成的桥式驱动电路,最大驱动电流可达到4A。该芯片使用时外围电路简单,控制方法十分方便。而且其驱动效果良好。
经过比较,一块L298可以驱动两个电机,大大简化了驱动电路,所以我们采用方案二。
(3)轨迹探测模块选择
方案一:采用红外对管检测。一般自然光线中红外线频段能量较弱,而且红外线波长较长,近距离衰减小,这样在一定程度上能避免外界光源干扰,可以更为可靠的探测近距离的黑线。
方案二:采用光敏电阻检测。光敏电阻对光强敏感,当光强时其电阻较小。黑线和白纸对光的反射能力不同,所以可以利用这一性质,判断黑线的位置。
在车下面,光强较弱,会在一定程度上影响光敏电阻的功能,并且还有钨丝灯对光敏电阻的影响,不同的地方光强不一样。另外,光敏电阻对光强有一定的反应时间,实时性不如红外对管,难以达到小车循迹的要求,所以我们选择方案一。
(4)金属片的探测
方案一:采用分立的霍尔元件。霍尔元件在接近金属时,由于其电磁效应,会产生脉冲信号。然而,它产生的脉冲信号不是十分稳定,不便于信号的处理。
方案二:采用工业用的集成金属检测元件——接近开关。当其接近金属片时可以产生很稳定的脉冲信号。
当检测到金属的时候输出为低电平,没有检测到金属的时候为高电平。变化非常灵敏,接近开关完全能满足要求,最后我们采用方案二。
(5)路程测量方案的选择
方案一:采用红外发射—接收对管。在车轮涂有黑白两种颜色,红外发射—接收对管对准不同的颜色时会得到高低不同的脉冲电平,进而得到车轮所转圈数。电动车在行驶过程中车轮所转的圈数,再乘以车轮的周长便可得到小车行驶的路程。
方案二:采用霍尔传感器。霍尔传感器由霍尔开关、磁铁组成。其工作原理是将霍尔开关和磁铁分别安装在车架、车轮的适当位置。辆行驶时,在磁铁的作用下,霍尔开关产生开关信号,累计开关信号的总数,再乘上车轮的周长,便可计算出车辆行驶的距离。
方案三:采用接近开关。在车轮上安装铁片。当其接近金属片时可以产生很稳定的脉冲信号。当检测到金属的时候输出为低电平,没有检测到金属的时候为高电平。累计脉冲信号的总数,再乘上车轮的周长,便可计算出车辆行驶的距离。
考虑到安装传感器的部位在车轮处,此处较弱的光强会影响对管的工作,使得方案一在测量时会受到较大的影响。由于接近开关过大,不好装在车轮上,固方案三不可取。而霍尔传感器受到的影响这较小,故方案二可以实现较精确的测量。所以我们选择方案二。
(6)避障方案的选择
方案一:采用超声波探测。超声波频率高、波长短、定向性好、能量集中,适合于距离测量,且不易受光线干扰。利用超声探头,可以确定前方是否有障碍物以及障碍物和小车的距离,将数据送与430处理,可以确定小车避障的具体路线,但其电路比较复杂。
方案二:采用反射式红外探测。其测量的距离为15~20cm,完全可以满足要求。
方案二电路简单,程序也简单,所以我们采用方案二。
(7)小车寻光方案的选择
方案一:采用被动式红外探测器。被动式红外探测器内部有接收红外光的光敏三极管,可以接收障碍物等其他物体发射的红外光。这种检测方法利用日光灯发热产生的较强的红外光来检测光源,在能检测到和不能检测到光源的临界点,光敏三极管的射极输出电压有一个较大的跃变,便于后级处理。
方案二:采用光敏三极管。光敏三极管的阻值可以随着光强的变化而变化。因此,可以将其与一定值电阻串联分压,利用430内带有的AD转换功能,通过比较光敏三极管上电压大小,比较出哪边的光强较强。
方案三:采用光敏电阻,其方法和光敏三极管一样。
被动式红外探测器在变化的光源下输出的是一个跃变,故只有两种状态,不适合小车的寻光。然而,光敏三极管可以连续的变化,可以比较三个及三个以上方向的光强大小,更合适小车的寻光。于是我们选择方案二。
(8)电源的选择
方案一:采用单电源供电。此方案供电方式简单,电路很容易实现。但是直流电机需要很大的电流驱动,会造成电源电压的不稳定,且会产生毛刺,严重时可能会使430掉电。
方案二:采用双电源供电。给直流电机单独用一个电源供电。这样可以有效的避免直流电机对其他电路的干扰。
综上述:我们采用方案二。
(9)刹车机构功能方案比较
方案一、自然减速式。当系统发出停止信号时停止给驱动电机供电,小车在无动力状态因阻力而自然变为静止。由于惯性,小车全速行驶时需1.8 秒后才能停止,因车轮滑行造成的误差较大。无法实现精确制动的目标。
方案二、反转式。当小车需要停车时给驱动电机以反转信号,利用轮胎与跑道的摩擦力抵消惯性效应。由于车速是渐减的,反向驱动信号长度也要渐减,否则小车可能反向行驶。使用此方案后全速刹车反应时间减少为0.5s。
经过反复测试和讨论,我们采用方案二。
二、系统总体设计方案及实现方框图
1、系统总体设计方案
本系统以MSP430为控制核心,对各个传感器所得到的数据进行处理。用红外对管检测黑线和白纸,接近开关检测铁片,红外避障,光敏三极管检测光源的方向,霍尔元件测量小车的行驶距离;再由MSP430控制小车的行驶方向、声光警报、LCD显示。当小车完成所有运动之后显示小车行程的时间、铁片中心线离起始线的距离和铁片的个数。
2、系统实现框图

图(1)系统总框图
三、理论分析与计算
1、铁片中心线距离的测量
我们在车轮上装了八个磁片,小车的行程即为小车轮子所转过的长度,通过霍尔传感器可以记得小车所转过的圈数N,再测得小车轮子周长L。当接近开关进入铁片的时候,测量出铁片一端距离起始线的距离X=L*N1/8,当接近开关出铁片的时候,测量出铁片另一端距离起始线的距离Y=L*N2/8。所以得到铁片中心线到起始线的距离为S=(X+Y)/2 。两次测量铁片测量的方法都是一样的。
2、小车行程时间的测量
在主程序之前加一个延时,小车调整好之后才开始起步,当电机启动的时候开启计时器,当寻光停止的时候关闭计时器,MSP430再将行程的时间送到液晶显示出来,这样得到的时间比较准确。
四、 主要功能电路设计
1、小车循迹模块
 我们采用红外对管是ST188为了提高可以提高红外二极管的发射功率,它与电源之间应串联一个小电阻。晶体三极管导通时集电结和发射结之间有一定的直流电阻,为了使三极管导通时,输出的电压尽量的小,应选择尽量大的集电极电阻。输出的电压再经过LM311比较器, 当红外对管检测到黑线时,黑线将 图(2)st188电路图
我们采用红外对管是ST188为了提高可以提高红外二极管的发射功率,它与电源之间应串联一个小电阻。晶体三极管导通时集电结和发射结之间有一定的直流电阻,为了使三极管导通时,输出的电压尽量的小,应选择尽量大的集电极电阻。输出的电压再经过LM311比较器, 当红外对管检测到黑线时,黑线将 图(2)st188电路图
红外线的大部分吸收,红外二极管不导通,光敏三极管处于截止状态,输出口输出一个较高电压。当红外对管检测到白纸时,光敏三极管将导通,输出口将输出一个较低的电压。
2、小车检测铁片模块
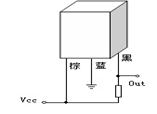
接近开关属于集成金属检测元件。它的外部引出了蓝、黑、棕三个颜色的线。其外部电路如图(3)所示。当检测到金属时,输出端输出低电平。将输出接到430的外部中断口,当检测到铁片时将产生中断,从而可实现对铁片的探测和计数。
图(3) 接近开关电路图
3、小车测距模块
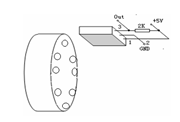 本系统采用霍尔传感器测距,在车轮和车轴上分别安装八个磁铁和一片霍尔片,八个磁片对称放置,通过计量输出脉冲数来测量行程。如图(4)所示,由于霍尔开关的霍尔效应当其接近磁片时输出低电平,在其没有检测到金属时输出高电平。由于小车的钱轮是导向轮,转弯的时候会检测不到,所以我们在安装霍尔传感器时将其装在后轮。
本系统采用霍尔传感器测距,在车轮和车轴上分别安装八个磁铁和一片霍尔片,八个磁片对称放置,通过计量输出脉冲数来测量行程。如图(4)所示,由于霍尔开关的霍尔效应当其接近磁片时输出低电平,在其没有检测到金属时输出高电平。由于小车的钱轮是导向轮,转弯的时候会检测不到,所以我们在安装霍尔传感器时将其装在后轮。
图(4) 霍尔传感器电路图
4、小车避障模块
我们采用的是用红外检测障碍物避障,在车头的最右边和车的右侧面分别装一个红外装置1和红外装置2(如图(2)),遇到障碍物时有电平变化。由于小车转弯不够灵活,当车前面的红外检测到有障碍物的时候,小车后退一段距离,再向左前进,然后向右转一角度,摆正车身,使小车向左移动一个车身,移动的距离不能太大,不能太小,太大会碰到障碍物2,并且不能触发右边的红外进行中断,太小的话,消耗的时间太多。当小车避过第一个障碍物,侧面的红外会检测到有障碍物,于是就开启寻光。由于钨丝灯发出的光线中含有红外光,对红外模块1影响太大了,所以我们采用了集成红外模块取代红外模块1,而钨丝灯对红外模块2没有多大的影响,所以红外模块2用分立元件。
5、小车寻光模块
利用MSP430内部自带的十二位的AD,转换光敏三极管上的分压,经过比较即可判断该方向上光强的大小。由于内部AD参考电压为2.5V,所以利用两个相同的电阻串联分压得到2.5V,再用光敏三极管和一定值电阻分压。光敏三极管阻值较大,所以用作产生2.5V基准的电阻应当较小。如图(6)所示,三极管2和3所分得得电压进行比较,三极 管1和4所分得得电压进行比较,从而来调整角度。小车主要是靠2和3进行控制 方向,当车身角度过大的时候靠1和4控制方向。当2和3的数值都达到最大的时候就停止运动,从而精确入库。
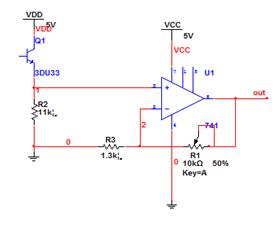
图(6)
图(5)
6、直流电机驱动模块
利用MSP430的I/O口产生PWM控制信号,由于430的输出电流有限,不能驱动直流电机,所以需要对PWM控制信号进行功率放大。采用电机驱动专用芯片L298。430的四个控制口与L298四个输入口相连,L298的四个输出口分别控制小车的前轮电机和后轮电机,从而控制前进、后退、左转、右转、停止。
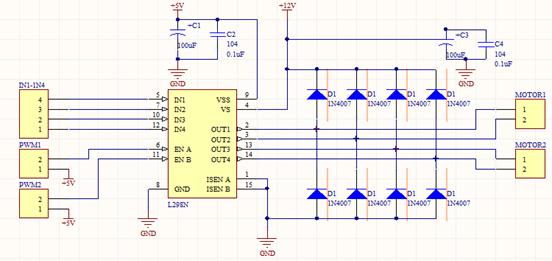
图(7)
五、系统软件的设计
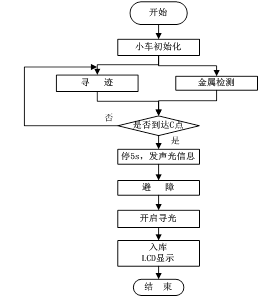
图(8)程序流程图
六、测试量数据与分析
1、测量数据

表(1)测试结果
2、数据分析
本小车系统不是很稳定,原因主要是小车转弯不灵敏,循迹速度不能过快,还有钨丝灯发出的光线会对红外检测有一定的影响,使得小车蔽障时间较长,入库时有可能冲出黑线,这是需要改进的地方。
参考文献
[1] 黄根春 《全国大学生电子设计竞赛教程》 电子工业出版社
[2] 谢自美 《电子线路设计·实验·测试》 华中科技大学出版社