一、北斗二代B1信号说明
(1)B1信号由IQ两个支路的“测距码+导航电文”正交调制(QPSK)在载波上构成。
表达式如下:

式中:A表示信号振幅;C表示测距码;D表示测距码上调制的数据码;f0表示载波频率1561.098MHz; 表示载波初相。
表示载波初相。
(2)B1I信号测距码
CB1I码速率为2.046Mcps,码长为2046。
CB1I码是由两个线性序列G1和G2模二和产生平衡Gold码后截短1码片生成。G1和G2序列分别由两个11级线性移位寄存器生成,生成的多项式为:
G1(X)=1+X+X7+X8+X9+X10+X11
G1(X)=1+X+X2+X3+X4+X5+X8+X9+X11
G1和G2的初始相位为:
G1序列:01010101010
G2序列:01010101010
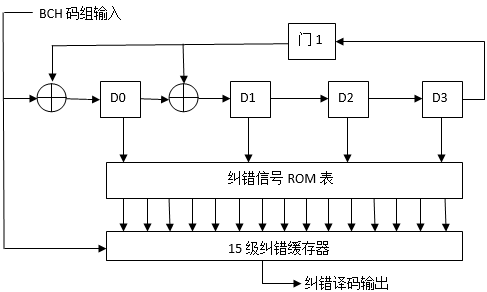
(3)CB1I码发生器如下图所示
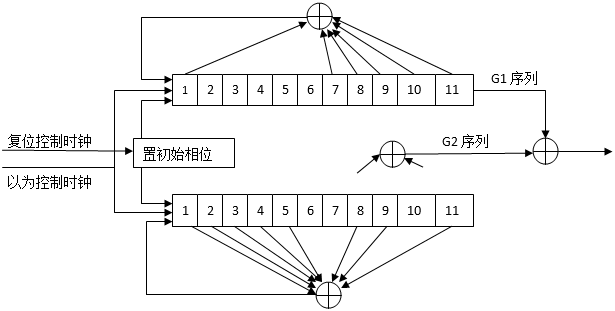
通过对产生G2序列的移位寄存器不同抽头的模二和可以实现G2序列相位的不同偏移,与G1序列模二和后可生成不同卫星的CB1I码。
(4)导航电文纠错编码
导航电文采取BCH(15,11,1)码加交织方式进行纠错。BCH码长为15比特,信 息为为11比特,纠错能力为1比特,其生成多项式为 。
。
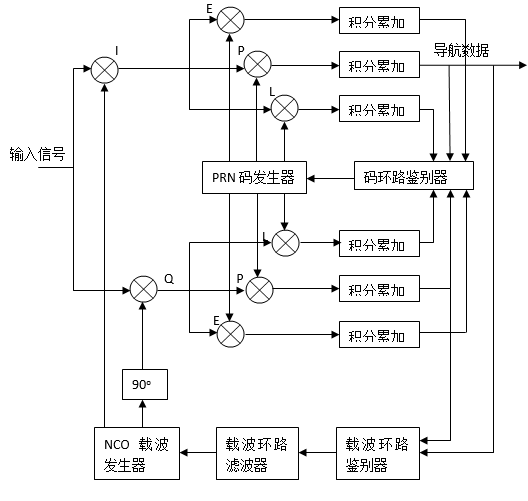
导航电文数据码按照每11比特顺序分组,对需要交织的数据码先进行串/并变换, 然后进行BCH(15,11,1)纠错编码,每两组BCH码按1比特顺序进行并/串变换, 组成30比特码长的交织码。BCH(15,11,1)编码框图如下:
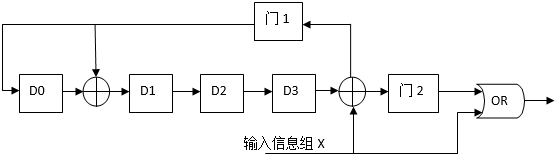
其中,4级移位寄存器的初始状态全为0,门1开,门2关,输入11比特信息组X, 然后开始移位,信息组一路经或门输出,另一路进入g(X)除法电路,经11次移位 后11比特信息组全部送入电路,此时移位寄存器内保留的即是校验位,最后门1 关, 门2 开,再经过4次移位,将移位寄存器的校验位全部输出,与原先的11比特信 息 组成一个长为15比特BCH码。
(4)导航电文的概述
根据速率和结构的不同,导航电文分为D1导航电文和D2导航电文。D1导航电文的速率为50bps,并调制有1kbps的二次编码,内容包括基本的导航信息(本卫星基本导航信息、全部卫星历书信息、与它系统时间同步信息);D2导航电文速率为500bps,内容包括基本导航信息和增强服务信息(北斗系统的差分及完好性信息和网格点电离层信息)。
MEO/IGSO卫星(6~37号卫星)的B1I信号播发D1导航电文,GEO卫星(1~5号卫星)的B1I信号播发D2导航电文。
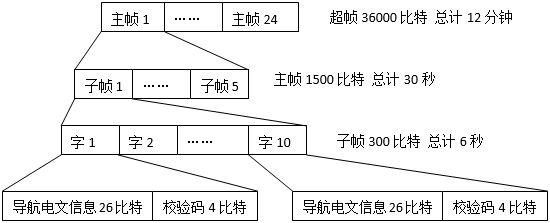
D1导航电文帧结构如下图:
补充说明:
每个字由导航电文数据及校验码两部分组成。每个子帧第一个字的前15个比特信息不进行纠错编码,后11比特采用BCH(15,11,1)方式进行纠错,信息位共有26比特;其它9个字均采用BCH(15,11,1)加交织方式进行纠错编码,信息位共有22比特。
二、数字接收机通用功能框图

三、接收机的总体设计
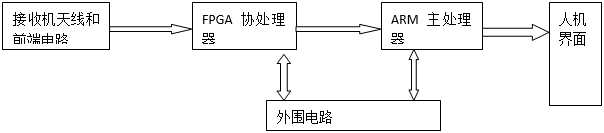
(1) 前端电路功能主要由北京东方联星科技有限公司推出的北斗二代卫星中频信号采集设备完成。工作流程:从天线进来的北斗二代B1频点信号经两级低噪放进行30dB的放大,之后通过中心频率在1561MHz,带宽40MHz的带通滤波器,滤除北斗二代B1频点射频信号带外干扰,经过滤波之后的信号与从频综过来的1561MHz本振信号一起进入AD8347进行混频,输出中心频率在0.042MHz的近似零中频IQ两路正交基带信号,之后经AD高速采样后信号进FPGA处理,降速至10MHz的数据率经USB2.0传输出来。
(2) FPGA的功能:对10MHz的北斗数字信号进行捕获和跟踪,其中捕获采用并行码相位搜索捕获,载波跟踪环采用二阶PLL的costas环,码跟踪环采用超前—滞后跟踪环的延时锁定环DLL。输出跟踪模块中I支路的1000bit/s的值。
(3) ARM的功能:从1000bit/s的数字信号中提取导航数据,并解算卫星位置,伪距估计,最终完成接收机的位置解算。同时ARM也要完成对FPGA的接口控制。
四、接收机前段电路

四、接收机基带信号处理
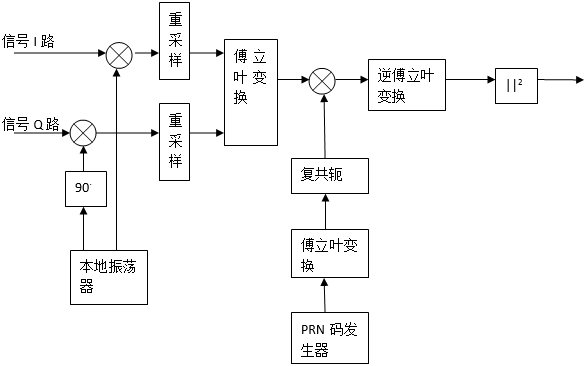
(1)卫星相对于接收机运动会产生多普勒频移,对于静止的接收机来说,最大的多普勒频移约为±5KHz,此处联系北斗系统的实际情况,搜索的dopplor范围为±3KHz。
输入中频信号载波频率fc=-0.098MHz
信号采样频率fs=10MHz,1ms时间内所采样的数据长度为10000。
本地振荡器产生的本地载波信号:carrier=exp(j*2*pi*n*(fc+dopplor)/fs)。其中n是一个从0~9999的数列。
最后经过相乘后去掉中频信号中的载波。
(2)重采样的目的是为了对数字信号进行降速,因为当前1ms内含有10000个采样数字,而1ms内只含有2046个C/A码片,所以将信号从10MHz降为2.046MHz。
(3)对I路和Q路的数据进行傅立叶变换是将两路信号组合得到信号x(n)=I(n)+jQ(n),然后进行FFT运算。然后与经过傅立叶变换的本地伪码相乘,输出结果经过傅立叶逆变换后变成时域信号,模值表示输入信号与本地伪码的相关结果,若结果中出现峰值,其位置即表示接受信号的码相位。
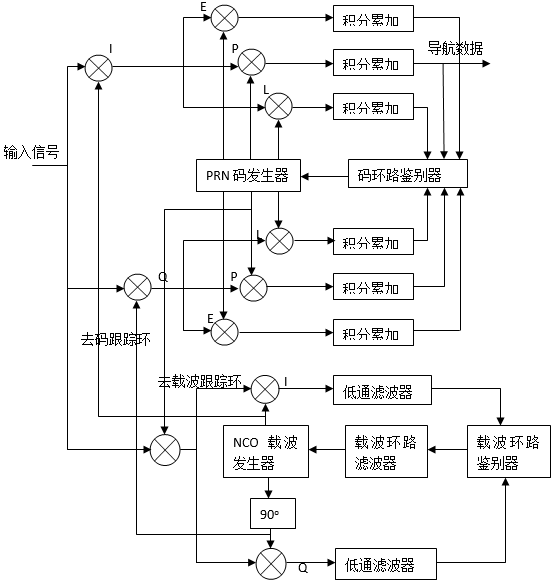
2、载波跟踪
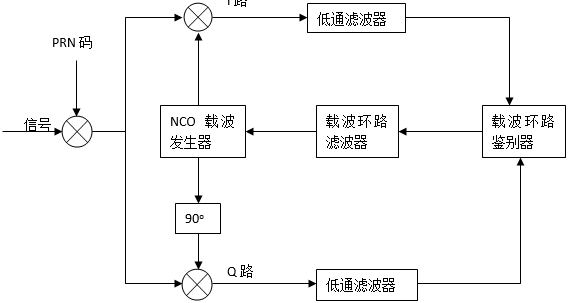
输入信号与本地PRN码(假定经过信号的捕获环节和码跟踪环的锁定后PRN码相位与输入信号中C/A码相位完全一致)相乘后去除信号中的C/A码部分,只剩下载波部分和导航电文。环路鉴别器模块的作用是获得本地载波与输入信号的相位误差,其输出的相位误差经过滤波后反馈给数控振荡器(NCO),最终实现NCO载波发生器生成的载波频率与输入信号完全一致。
其中载波环路鉴别器D=arctan(QK/Ik),当实际相位误差为0或±180o时,鉴别器输出为0,也就是说Costas环对180o相移不敏感,因此对导航数据引起的相位翻转不敏感,所以接收机采用这种载波跟踪环。
关于锁相环的几个公式:
a) 阻尼因数

a) 噪声带宽为
b) 二阶滤波器常数
3、码跟踪
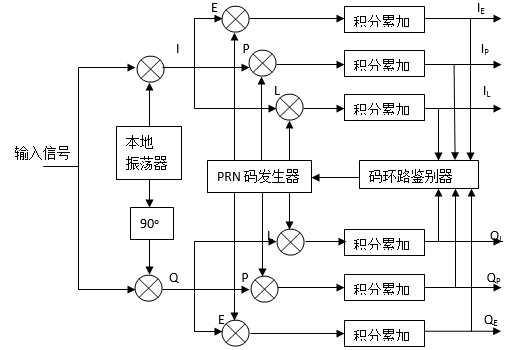
输入信号与本地振荡器产生的载波(假定经过信号的捕获环节和载波跟踪环的锁定后该载波的频率与输入信号的频率完全一致)相乘,去除输入信号中的载波部分,只保留C/A码和导航电文。PRN码发生器在I路和Q路分别产生3路间距为±1/2的码片与之相乘。信号经过两次乘法运算后,对六路输出进行积分累加。其结果就是本地码与输入信号中码的相关程度。最后经过码环路鉴别器进行判定,输出反馈值来调整PRN码发生器输出码的码相位。最终输出的IP就是导航电文。
其中码环路鉴别器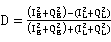 ,属于非相干类型,特点是归一化超前-滞后功率,在码片误差大于1/2时具有良好的特性,有助于DLL在不同的信噪比和不同的信号强度下保持跟踪。还有它同时使用了I路和Q路,性能独立于PLL。
,属于非相干类型,特点是归一化超前-滞后功率,在码片误差大于1/2时具有良好的特性,有助于DLL在不同的信噪比和不同的信号强度下保持跟踪。还有它同时使用了I路和Q路,性能独立于PLL。
4、完整的跟踪环模块
完整跟踪通道
五、导航电文的提取和处理
1、导航电文的恢复
(1)根据D1导航电文的调制规则需要先将D1导航电文上调制的20比特NH码(00000100110101001110)去除,从而将1kbps的数据转换为50bps的导航信息数据。
(2)根据D2导航电文的调制规则需要将1kbps的数据中每连续两个相同的值替换成一个值,最终得到一个500bps的导航信息数据。
2、导航数据的帧同步
导航数据编码严格按照北斗卫星导航系统空间信号接口控制文件(Beidou_ICD_V1.0)所定义的方案。
北斗导航数据解码的前提是确定子帧的起始位置。
在导航电文中每一帧的第1~11比特为帧同步码,由11比特修改巴克码组成,其值为“11100010010”,第1比特上升沿为秒前沿,用于时标同步。因为Costas环具有跟踪信号180o相位翻转的能力,所以帧同步码也有可能以反码“00011101101”的形式出现。
因为实际上,这两种帧同步码有可能出现在接收数据的任意位置,所以当我们在匹配到第一个帧同步码后,从当前匹配的位置向后300个数据点(即一个子帧的长度)和600个数据点(即两个子帧的长度)均出现帧同步码的话,才能确定找到了子帧的起始位置,否则就需要重新匹配。
3、导航电文数据码纠错
积分累加后的IP路输出进行二值化(+1,0)后,转化为1kbps的数据。在对导航电文进行提取之前需要对所得到的数据进行纠错。
根据北斗卫星导航系统导航电文的BCH编码规则,每两组BCH(15,11,1)码是按比特交错方式组成30比特码长的交织码,30比特码长的交织码编码结构为:

其中: 为信息位,下标i表示第i组BCH码,值为1或2;上标j表示BCH码中第j个信息位,值为1~11;
为信息位,下标i表示第i组BCH码,值为1或2;上标j表示BCH码中第j个信息位,值为1~11; 为校验位,下标i表示第i组BCH码,值为1或2;上标m表示BCH码中第m个信息位,值为1~4。
为校验位,下标i表示第i组BCH码,值为1或2;上标m表示BCH码中第m个信息位,值为1~4。
所以在纠错之前要先按每一比特的顺序进行串/并变换,然后按照上图进行纠错译码。最后得到并行的两路各为15比特一组的数据,其中每组的前11位为导航数据。
4、从子帧1、2、3中获得星历数据
星历参数描述了在一定拟合间隔下得出的卫星轨道。它包括15个轨道参数、1个星历参考时间。星历参数更新周期是1小时。
在获取星历数据前,首先要读取每一子帧的子帧计数(第16,17,18比特的数据),从而确定每一子帧的序列号。然后根据导航电文各子帧信息格式的编排,读取如下各个参数:
根据接收到的星历参数可以计算卫星在CGCS2000坐标系中的坐标。步骤如下:
(1)CGCS2000坐标系下的地球引力常数:
(2)CGCS2000坐标系下的地球旋转速率: =7.2921150
=7.2921150
(3)圆周率:
(4)计算半长轴:
(5)计算卫星平均角速度:
(6)计算观测历元到参考历元的时间差:
(7)改正平均角速度:
(8)计算平近点角:
(9)迭代计算偏近点角:
(10)计算真近点角:
(11)计算纬度幅角参数:
(12)纬度幅角、径向和轨道倾角的改正项:
(13)计算改正后的纬度幅角:
(14)计算改正后的径向:
(15)计算改正后的轨道倾角:
(16)计算卫星在轨道平面内的坐标:
(17)计算历书升交点赤经(地固系):
(18)计算MEO/IGSO卫星在CGCS2000坐标系中的坐标:
(19)计算历元升交点的赤经(惯性系):
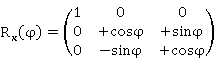
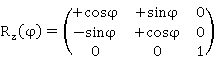
(20)计算GEO卫星在自定义坐标系系中的坐标:
(21)计算GEO卫星在CGCS2000坐标系中的坐标: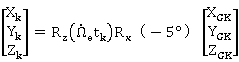
其中:
 ;
;
5、伪距计算
如果不考虑每颗卫星的时钟修正项,我们可以认为不同卫星的子帧1都是在同一时刻发出的。因为子帧1每30s出现一次,两颗卫星之间的最大时间差约为19ms,这就保证了不同卫星在同一时刻发射的子帧1是可比的。实际上,不同卫星的子帧1是在不同时刻被接收到的,那么这个时间差就代表不同卫星和接收机之间的时间(或距离)差。这个差值就是相对伪距。
我们可以根据以下2个输入数据得到两颗卫星子帧1的起始位置之间所包括的数字信号的个数,从而得到相对伪距:
(1) 捕获得到的测距码相位a
(2) 跟踪环和帧同步码匹配得到的子帧1的起点位置b
相对伪距:
6、接收机位置的计算
理论上,可以通过下面的公式计算出接收机的位置

因为直接求解的难度太大,可以假设 代入以上方程,然后用最小二乘法算出初始值,再通过迭代法求出实际值,即将初始值代入式中,与假设条件中的
代入以上方程,然后用最小二乘法算出初始值,再通过迭代法求出实际值,即将初始值代入式中,与假设条件中的 进行比较,通过比较结果调整初始值,进行二次代入。
进行比较,通过比较结果调整初始值,进行二次代入。