关于光速测量的方法及其本质异同的报告
小组成员:白美丹 白云瑞 郭佳昌
郭丝丝 贺小平 王阳凡
关于光,那是我们每一个人都特别熟悉的。基于我们现在学习的理解,我们都知道光是一种电磁波,那即是这样,光也具有粒子性和波动性。那么光也有自己的速度,我们每天都在用光速解决问题。那么光速是怎么来的,它的数值那么大,怎么测量的?今天我们讨论讨论光速的测量史。
一. 光速的几种测量方法及其原理
1.罗默 木星蚀法
早在1676年丹麦天文学家罗默(1644—1710)首先测量了光速.由于任何周期性的变化过程都可当作时钟,他成功地找到了离观察者非常遥远而相当准确的“时钟”,罗默在观察时所用的是木星每隔一定周期所出现的一次卫星蚀.他在观察时注意到:连续两次卫星蚀相隔的时间,当地球背离木星运动时,要比地球迎向木星运动时要长一些,他用光的传播速度是有限的来解释这个现象.光从木星发出(实际上是木星的卫星发出),当地球离开木星运动时,光必须追上地球,因而从地面上观察木星的两次卫星蚀相隔的时间,要比实际相隔的时间长一些;当地球迎向木星运动时,这个时间就短一些.因为卫星绕木星的周期不大(约为1.75天),所以上述时间差数,在最合适的时间(上图中地球运行到轨道上的A和A’两点时)不致超过15秒(地球的公转轨道速度约为30千米/秒).因此,为了取得可靠的结果,当时的观察曾在整年中连续地进行.罗默通过观察从卫星蚀的时间变化和地球轨道直径求出了光速.由于当时只知道地球轨道半径的近似值,故求出的光速只有214300km/s.这个光速值尽管离光速的准确值相差甚远,但它却是测定光速历史上的第一个记录.后来人们用照相方法测量木星卫星蚀的时间,并在地球轨道半径测量准确度提高后,用罗默法求得的光速为299840±60km/s。
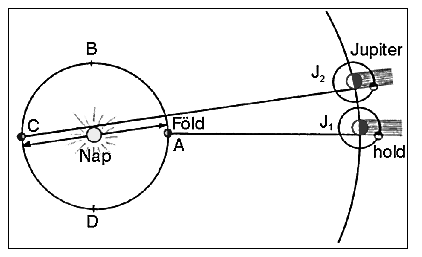
罗默很快意识到,如果认为光速是有限的话,这1000秒时间恰好对应光穿过地球轨道直径所需要的时间。那个时代,地球轨道直径被认为是大约2.76亿公里(正确值是约3.0亿公里),因此罗默得到的光速比正确值略小,但作为对光速的第一次成功测量,罗默的方法被载入了史册。
2.布莱德雷 光行差法
1728年,英国天文学家布莱德雷(1693—1762)采用恒星的光行差法,再一次得出光速是一有限的物理量.布莱德雷在地球上观察恒星时,发现恒星的视位置在不断地变化,在一年之内,所有恒星似乎都在天顶上绕着半长轴相等的椭圆运行了一周.他认为这种现象的产生是由于恒星发出的光传到地面时需要一定的时间,而在此时间内,地球已因公转而发生了位置的变化.他由此测得光速为:
C=299930千米/秒
1725年,英国天文学家布莱德雷发现了恒星的“光行差”现象,以意外的方式证实了罗麦的理论。刚开始时,他无法解释这一现象,直到1728年,他在坐船时受到风向与船航向的相对关系的启发,认识到光的传播速度与地球公转共同引起了“光行差”的现象。他用地球公转的速度与光速的比例估算出了太阳光到达地球需要8分13秒。这个数值较罗麦法测定的要精确一些。菜德雷测定值证明了罗麦有关光速有限性的说法。
3.旋转齿轮法,旋转镜法,旋转棱镜法
斐索 旋转齿轮法
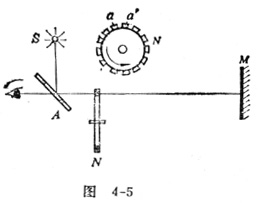
用实验方法测定光速首先是在1849年由斐索实验.他用定期遮断光线的方法(旋转齿轮法)进行自动记录.实验示意图如下.从光源s发出的光经会聚透镜L1射到半镀银的镜面A,由此反射后在齿轮W的齿a和a’之间的空隙内会聚,再经透镜L2和L3而达到反射镜M,然后再反射回来.又通过半镀镜A由L4集聚后射入观察者的眼睛E.如使齿轮转动,那么在光达到M镜后再反射回来时所经过的时间△t内,齿轮将转过一个角度.如果这时a与a’之间的空隙为齿a(或a’)所占据,则反射回来的光将被遮断,因而观察者将看不到光.但如齿轮转到这样一个角度,使由M镜反射回来的光从另一齿间空隙通过,那么观察者会重新看到光,当齿轮转动得更快,反射光又被另一个齿遮断时,光又消失.这样,当齿轮转速由零而逐渐加快时,在E处将看到闪光.由齿轮转速v、齿数n与齿轮和M的间距L可推得光速c=4nvL.
在斐索所做的实验中,当具有720齿的齿轮,一秒钟内转动12.67次时,光将首次被挡住而消失,空隙与轮齿交替所需时间为1/12.67s
傅科 旋转镜法
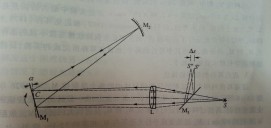
旋转镜法的主要特点是能对信号的传播时间作精确测量.1851年傅科成功地运用此法测定了光速.旋转镜法的原理早在1834年1838年就已为惠更斯和阿拉果提出过,它主要用一个高速均匀转动的镜面来代替齿轮装置.由于光源较强,而且聚焦得较好.因此能极其精密地测量很短的时间间隔.实验装置如图所示.从光源s所发出的光通过半镀银的镜面M1后,经过透镜L射在绕O轴旋转的平面反射镜M2上O轴与图面垂直.光从M2反射而会聚到凹面反射镜M3上,M3的曲率中心恰在O轴上,所以光线由M3对称地反射,并在s′点产生光源的像.当M2的转速足够快时,像S′的位置将改变到s〃,相对于可视M2为不转时的位置移动了△s的距离可以推导出光速值。式中w为M2转动的角速度.l0为M2到M3的间距,l为透镜L到光源S的间距,△s为s的像移动的距离.因此直接测量w、l、l0、△s,便可求得光速。
在傅科的实验中:L=4米,L0=20米,△s=0.0007米,W=800×2π弧度/秒,他求得光速值c=298000±500km/s.
迈克尔逊 旋转棱镜法
美国的迈克尔逊把齿轮法和旋转镜法结合起来,创造了旋转棱镜法装置.因为齿轮法之所以不够准确,是由于不仅当齿的中央将光遮断时变暗,而且当齿的边缘遮断光时也是如此.因此不能精确地测定象消失的瞬时.旋转镜法也不够精确,因为在该法中象的位移△s太小,只有0.7毫米,不易测准.迈克耳逊的旋转镜法克服了这些缺点.他用一个正八面钢质棱镜代替了旋转镜法中的旋转平面镜,从而光路大大的增长,并利用精确地测定棱镜的转动速度代替测齿轮法中的齿轮转速测出光走完整个路程所需的时间,从而减少了测量误差.从1879年至1926年,迈克耳逊曾前后从事光速的测量工作近五十年,在这方面付出了极大的劳动.1926年他的最后一个光速测定值为 c=299796km/s
4.安德森的克尔盒法(群速度)
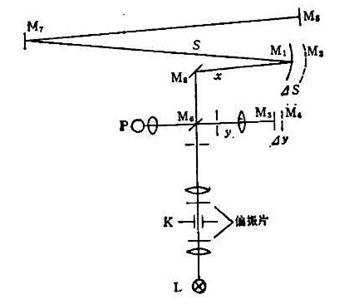
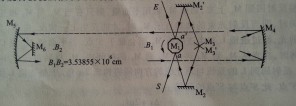
实验装置如图所示,其中M1,M2,M3,M4,M5,M7,M8均为全反射镜。光源L发出的光用克尔盒K调制成强度按正弦曲线变化的光束,其频率为19.2MHz.半透明镜M6使该光束分成两路,一路经M3反射到光电池P,另一路经M1,M7和M5也反射到光电池P。设M1,M7和M5之间的光程为S,M1和M6之间的光程为x,M3和M6之间的光程为y。如果两路光程差恰为半波长的奇数倍,则P接收到的光信号为极小,并有关系式
2s + 2x - 2y = (2n + 1)λ/2
其中n为整数。不用M1而用M2使光直接返回到M6,调节M3到M4的位置,则当P处光强为极小时有关系式2x +2Δs - 2y - 2Δy = λ/2
将以上两式相减得 2s - 2Δs + 2Δy = nλ
即第二次光比第一次多走的光程为2s- 2Δs + 2Δy=S,所用时间也为周期的n倍,这样,光速c=S/nT=Sf/n.
即只需测量距离s和短的间隔Δs和Δy就可以求出光速,从而大大简化了距离的测量。
单位比值法()
在电磁学中,任意电学量的两种单位制的换算比为
 ,
,
式中Q表示电量,E表示电场,C表示电容,角标s与m分别表示静电单位制与电磁单位制,克尔劳施和韦伯在1856年测量电量比,麦克斯韦在1868年测量电场强度比,;罗萨和多尔塞在1906年测量电容比,分别得到c=310800km/s,284300km/s,299784km/s
5.光导纤维和相差法测光速
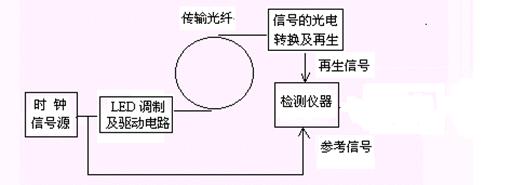
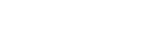
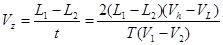
图2 测定光导纤维中光速实验装置的方框图
在该图中由调制信号源提供的周期为 T,占空比为50%的方波时钟信号对半导体发光二极管LED的发光光强进行调制,调制后的光信号经光导纤维、光电检测器件和信号再生电路再次变换成一个周期为T、占空比为50%的方波序列,但这一方波序列相对于调制信号源输出的原始方波序列有一定的延时,这一延时包括了LED驱动与调制电路和光电转换及信号再生电路引起的延时,也含有我们要测定的调制光信号在给定长度光纤中所经历的时间在内。实验中采用“双光纤比较法”。即:保持电路状态不变,分别测出信号通过 、
、 的延时
的延时 、
、 ,则有:
,则有:

相差测量方法
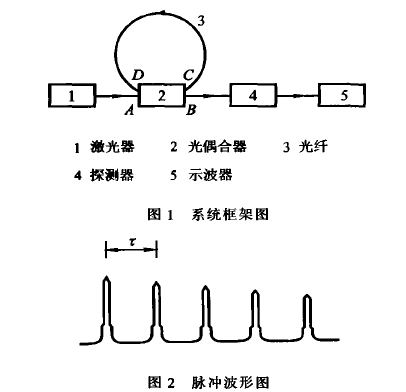
如果把再生信号和作为参考信号的原始调制信号接到一个具有异或逻辑功能的逻辑电路的两个输入端,则在0~π的相移所对应的延时范围(即0~T/2)内,该电路的输出波形就是一个周期为T/2,但脉宽与以上两路信号的相对延时成正比的方脉冲序列(如图3示),这一脉冲序列的直流分量的电平值就与以上两路输入信号的相对延时成正变关系。用示波器可观察到异或门输出的占空比随延时变化的方脉冲序列,用直流电压表可以测出这一方脉冲的直流分量的电平值。
图3 相位检测器原理图
利用异或逻辑电路所组成的相位检测电路的相移——电压特性曲线如图4所示,其中VL是两输入信号相差为2nπ、延时为nT(n=0,1,2……)时相位检测器输出的低电平值,VH是两输入信号相差为(2n+1)π、延时为(2n+1)T/2(n=0,1,2……)时相位检测器输出的高电平值,在0~π的相移范围内由异或门组成的相位检测电路输出的方脉冲序列的直流分量的电平值 与两输入信号之间的关系为:

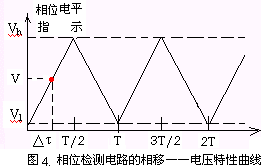
对应的延时关系
其中△t为两路信号的相对延时,T为调制信号的周期,可用示波器测得。
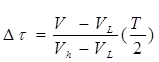
利用(4)式我们就可根据由以上测量系统所获得的实验数据计算出调制光信号在光导纤维中传输时所经历的时间。在具体测量时,先用一长度为L1的长光纤接入测量系统,测得相位检测器输出的直流分量 的电平值为V1 ,然后用长度L2的短光纤代替长光纤,并在保持测量系统电路参数不变(也即保证两种测量状态下,由于电路方面因素引起的延时一样)的状态下,测得相位检测电路输出的直流分量的电平值为V2 ,则调制信号在(L1—L2)长度的光纤中传播时所经历的时间就等于:

对应的传播速度为:
6.激光脉冲法
对于无限大的均幅平面波在一定介质中的传播,
其等相位面
 (1)
(1)
相位面的变化
 (2)
(2)
相速度公式
 (3)
(3)
式中  为光波角频率,k为光波角波数,n为介质的折
为光波角频率,k为光波角波数,n为介质的折
射率.
7.光速测定的实验方法
(1)微波谐振腔法
(2)激光测速法
(3)光拍法测光速
实验原理介绍
根据振动叠加原理:频差(Δω=ω1-ω2)较小、速度相同、同向传播的两束波叠加形成拍频。拍频波场其空间分布为两束波叠加后的振幅空间分布,形成一个周期性的空间包络面,频率为Δf=Δω/2л,而拍频波波长为λ。
所以,我们即可通过测量出拍频波的频率Δf和波长λ来确定光速。
用光电探测器接收拍频波信号,滤去直流成分,即可得到正弦形式的拍频波信号。若将同一拍频波分为2路,使其通过不同光程进入同一光电探测器,则该探测器所输出的两个光拍信号(即示波器上的正弦波)的位相差Δφ=ΔωΔL/c=2лΔfΔL/c,因
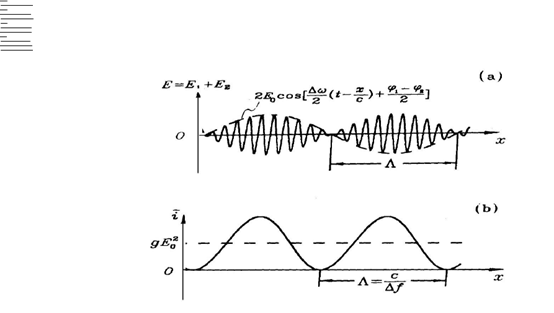
拍频波频率Δf已定,故位相差Δφ由光程差ΔL确定。
当两束拍频波光程差ΔL=n?λ时,则位相差Δφ=n?2л,则此时示波器上的两拍频波信号(正弦波)波形完全重合。故此,我们只需要调节光程,使示波器上相继出现2次波形重合,则可由仪器上的前后读数得其光程差ΔL=λ,而频率Δf由频率计测出
光速c的测量
实验通过实验装置获得两束光拍信号,在示波器上对两光拍信号的相位进行比较,测出两光拍信号的光程差及相应光拍信号的频率,从而间接测出光速值。
假设两束光的光程差为L,对应的光拍信号的相位差为' ', 当二光拍信号的相位差为2π时,即光程差为光拍波的波长
', 当二光拍信号的相位差为2π时,即光程差为光拍波的波长 时,示波器荧光屏上的二光束的波形就会完全重合。由公式?
时,示波器荧光屏上的二光束的波形就会完全重合。由公式? 。便可测得光速值c。式中L为光程差,F为功率信号发生器的振荡频率。
。便可测得光速值c。式中L为光程差,F为功率信号发生器的振荡频率。
8.电磁波发测量光速
(A)雷达法:
用三角的方法测量两点间的距离L,用电子技术测电磁波通过该距离的时间t,从而求得c=L/t,1949年阿斯拉克逊用此法测得光速为c= km/s.
km/s.
(B)频率波长法:用各种方法求已知频率v的电磁波波长 ,从而求得电磁波的传播速度c=*v。这种方法有:
,从而求得电磁波的传播速度c=*v。这种方法有:
(a)波导管法:电磁波在波导管中形成驻波。测此驻波的波长,由已知的频率v求得光速c。1891年特罗布里奇用频率为5KHZ的电磁波求得光速c=303600km/s.
(b)空腔共振法:用探针将高频震荡馈入抽空的准确知道空腔的大小,使其在空腔中形成驻波,测出此谐振频率v,由空腔的大小球出波长。1950年艾森用0.1m的空腔求得光速c= km/s。
km/s。
(c)微波干涉法:根据迈克尔逊干涉仪原理,使已知频率的微波沿相互垂直的路径在反射面上反射后产生干涉现象,从而求得其波长。
(d) 带光谱法:
直接由微波光谱学测出双原子分子或线性多原子的转动惯量常数 =
= ,再由红外振转光谱测出分子常数
,再由红外振转光谱测出分子常数 (其中I为分子转动惯量,h为普朗克常量),由此测得
(其中I为分子转动惯量,h为普朗克常量),由此测得
,1957年兰克测得光速c= km/s.
km/s.
二. 本质异同
在过去的三百年中,测量光速的方法经历了一系列重大改进多达好几十种,基线长由天文距离知道0.1m的空腔,测量范围由0.001MHZ的低频振荡到可见光,不确定度百分之几到百万分之几,在这里无线电技术起到了很大的作用,其中比较重要的方法就是克尔合法和微波干涉法,所有这些方法都获得数值相近的“C”.
综合所有测量光速的方法可知测量光速的方法可分为两类:
1.即直接法和间接法,其中直接测量光信号和电磁波信号的测得的都是群速度。
直接法:又叫时间飞程法,依据的原理是伽利略测量光速的原理,如木星法,齿轮法,旋转镜法皆属此类。这种方法由于后来科学技术的发展得到了很大的改进。
间接法:间接方法不是直接测量光信号,而是借助含c的公式测量相应的物理量来测算c。根据公式 ,利用实验测定光的频率与波长,进而通过公式间接计算的光速c。该法测定的光速均为相速度.它的种类繁多,大致可以分为四类:天文方法(光行差法),单位比值法,电磁波法,带光谱法。
,利用实验测定光的频率与波长,进而通过公式间接计算的光速c。该法测定的光速均为相速度.它的种类繁多,大致可以分为四类:天文方法(光行差法),单位比值法,电磁波法,带光谱法。
2.也可按照群速度和想速度分
群速度:齿轮法,旋转镜法,旋转棱镜法,克尔盒法,光电测距仪,雷达测距仪,声调制法
相速度:谐振腔法,微波干涉仪,单位比值法,
第二篇:几种测量光速的方法
几种测量光速的方法
引言: 光速的测定在光学的发展史上具有非常特殊而重要的意义。它不仅推动了光学实验,也打破了光速无限的传统观念;在物理学理论研究的发展里程中,它不仅为粒子说和波动说的争论提供了判定的依据,而且最终推动了爱因斯坦相对论理论的发展。
摘要: 光速的测定,经过了几百年的历史,最初的光速是由惠更斯根据丹麦科学家罗曼的理论测出的,但是很不精确。随后的科学家为了的到更精确的结果,便发明并运用不同的方法去测定光速,其中最先较精确的结果是法国科学家菲索旋转齿轮法,接着的是迈克尔逊的旋转镜和干涉仪的测法,还有生活中运用微波炉测定光速的方法。
关键字:光速的测定
正文:
一. 惠更斯的测定的光速
丹麦青年科学家罗默。罗默生于奥尔胡斯,在哥本哈根受过教育,后来移居巴黎。在罗默来巴黎的30年前,意大利天文学家卡西尼应路易十四聘请也来到巴黎,他对木星系进行了长期系统的观察和研究。他告诉人们,木星和地球一样也是围绕着太阳运行的行星,但它绕太阳运行的周期是12年。在它的周围有12颗卫星,其中有4颗卫星特别亮,地球上的人借助于望远镜就可以看清楚它们的位置。由于这些卫星绕木星运行,隔一段时间就会被木星遮食一次,其中最近木星的那颗卫星二次被木星遮食的平均时间间隔为42小时28分16秒。罗默在仔细观察和测量之后发现,这个时间间隔在一年之内的各个时间里并不是完全相同的,并且当木星的视角变小时,这个时间间隔要大于平均值。
1676年9月,罗默向巴黎科学院宣布,原来预计11月9日上午5点25分45秒发生的木卫食将推迟10分钟。巴黎天文台的天文学家们虽然怀疑罗默的神秘预言,但还是作了观测并证实了木卫食的推迟。11月22日罗默在解释这个现象时说,这是因为光穿越地球的轨道需要时间,最长时间可达22分钟。后来惠更斯利用罗默的数据和地球轨道直径的数据,第一次计算出光速为 2×108米/秒。虽然这个结果很不精确,但为光速的测定迈出了一大步。
二.法国科学家菲索的旋转齿轮法
菲索为法国科学家,他让光源发出的光从转动齿轮的间隙中通过,再通过透镜变成平行光束,这光束聚焦于安装在一定距离的平面镜上,被平面镜反射后再沿着相反的方向返回齿轮,进入观察者的眼睛。
当齿轮以某一速度转动时,观察者将看不到返回的光,这是因为光线从齿轮到达平面镜再回到齿轮时,恰好为下一个移来的齿所遮蔽,倘若使轮的转速增加1倍,光点又重新被看到了,因为返回的光恰好穿过下一个齿缝。设轮的 如果光速为C,齿轮与平面镜间的距离为l,那么, 进行的。齿轮的齿数是720个,计算光速为313,300公里/秒, 可以看出结果与今天的精确值比较接近。
三. 迈克尔逊旋转镜和干涉仪测法如图7所示是迈克尔逊用转动八面镜法测光速的实验示意图,图中S为发光点,T是望远镜,平面镜O与凹面镜B构成了反射系统。八面镜距反射系统的距离为AB=L(L可长达几十千米),且远大于OB以及S和T到八面镜的距离。现使八面镜转动起来,并缓慢增大其转速,当转动频率达到f0并可认为是匀速转动时,恰能在望远镜中第一次看见发光点S,由此迈克尔逊测出光速C。
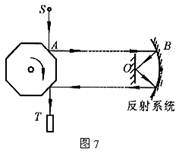
具体的算法为,此时八面镜转过角度为
即可得出C=16
以上为迈克尔逊的测定光速的原理及计算方法。
四.巧用微波炉测光速
光速的测量并不一定要用科学的仪器,其实在生活中我们可以利用身边的东西进行测量,我们知道电磁波的传播速度等于光速,因此我们可以运用微波炉发出的微波进行光速的测量。具体做法如下:
把旋转托盘从你的微波炉中拿出来,再把一块巧克力放在托盘上。用最大的功率加热,直到巧克力上有两到三处出现融化——这仅仅只需20秒钟的时间。然后,从微波炉中拿出巧克力,测量两个融化处之间的距离,再将此距离乘以2,在乘以2,450,000,000(即2450兆赫兹,如果你的微波炉是标准厂家生产的,那么多半就是这个频率)。接下来,你会惊奇地发现,算出的结果非常接近299,792,458——若加上米/秒的单位,即是光速。
我们知道,微波炉每秒产生24亿5千万次的超高频率,快速震荡炉中事物所含有的蛋白质、脂肪、水等成分的分子,使分子之间互相碰撞、挤压、摩擦,重新排列组合。简而言之,它是靠事物内部的摩擦生热原理来烹调的。由于巧克力棒静止不动地停留在微波炉里,微波持续地震荡相同的部位——即迅速变热并融化的地方。而相邻两个融化点之间的距离即是波长的一半,因为微波穿过巧克力块时是上下波动的。将两个融化点之间的距离乘以2,即为一个完整的波长。而微波和光波一样,它们都是以光速行驶的电磁波。在你的炉子里,它们的频率为2450兆赫兹,这就意味着它们每秒钟上下跳跃的次数为24.5亿次。我们已经计算出它们的波长——经历完整的一轮上升和下降的波动说走过的距离。因此我们可以计算出这样的微波经历24.5亿次上升和下降说走过的长度,也就是说,它们在一秒钟内所走过的长度。这样,我们的数据就足够了:如果你发现巧克力的融化点之间的距离是6厘米,那么用0.06*2*2.45*1,000,000,000讲会得到294,000,000——这个结果与物理学家们用了半个世纪测出的结果及其相似。
小结:以上为测量光速的几种方法,得出的结果的精确度不同,但总的来说都是人类智慧的结晶以及人类对科学进行探究的见证。