��Ƭ��ʵ��
 �γ����ƣ����������ʵ��
�γ����ƣ����������ʵ��
�ڿΰ༶��20##���Զ�������
�ον�ʦ����Զ��
�ƻ�ѧʱ��32ѧʱ
ʵ����Ա������ҫ �Ը��� ���ϻ�
����ε ���� ֣��
Ŀ ¼
ժҪ��������������������������������������������������������
��һ�� ������������������������������������������������������������������������.
1.1ʵ��Ŀ�ġ�������������������������������������������������������
1.2ʵ��Ҫ������������������������������������������������������
1.3��������Ľ��ܡ���������������������������������������������������
1.4 �о�˼·��������������������������������������������������������
�ڶ��� Ӳ�������������������������������������������������..
2.1 51��Ƭ�����ܡ���������������������������������������������������
2.2 UIN2003A����������������������������������������������������������
2.3 ZLG7290����������������������������������������������������������
2.3.1 7290����ԭ����������������������������������������������������
2.3.2 7290����ͼ����������������������������������������������������
���������ͼ��������������������������������������������������.
3.1 �ܵ�·ͼ������������������������������������������������������
3.2 7290��������ܡ�����������������������������������������������������
3.3 ��������ͼ��������������������������������������������������������
3.3.1 ���ƿ�ͼ��������������������������������������������������������
3.3.2 ����ͼ��������������������������������������������������������
����������������������������������������������������������������
�������ĵ������������������������������������������������������
��¼��һ��ϵͳ��������������������������������������������������
��¼�������ο���������������������������������������������������.
��ժҪ����
��������ǽ��������ź�ת��Ϊ��λ�ƻ���λ�ƵĿ�������Ԫ������������ڷdz��ص�����£������ת�١�ֹͣ��λ��ֻȡ���������źŵ�Ƶ�ʺ��������������ܸ��ر仯��Ӱ�죬���������������յ�һ�������źţ�������������������趨�ķ���ת��һ���̶��ĽǶȣ���Ϊ������ǡ���������ת���Թ̶��ĽǶ�һ��һ�����еġ�����ͨ������������������ƽ�λ�������Ӷ��ﵽȷ��λ��Ŀ�ģ�ͬʱ����ͨ����������Ƶ�������Ƶ��ת�����ٶȺͼ��ٶȣ��Ӷ��ﵽ���ٵ�Ŀ�ġ�
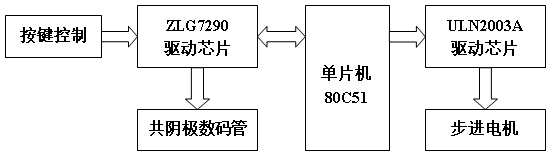
���γ���Ƶ�����������51��Ƭ�����ﵽ���Ʋ��������������ֹͣ����ת����ת���㶯��״̬��ʾ��Ŀ�ģ�ʹ����������Ƹ����������������оƬ����UIN2003�����д�������ߵ�ѹ�����·���ŵ㡣������λ����ܣ�ZLG7290��������״̬��ʾ���ܣ��������ݸ�ֱ�ۡ�ʵ�����������ÿ���ϵͳ�ﵽ����Ƶ�Ҫ��
���ؼ��ʡ�����Ƭ�� ������� UIN2003 ZLG7290 �����
��һ�� ����
1.1ʵ��Ŀ��
1����Ƭ���Բ���������ƿ�����Ϥ���������ԭ����Ӧ�á�
2����Ƭ���Բ���������ƿ�����Ϥ��Ŷ�����Ѿ�ԭ�������졣
3��ͨ�����ʵ����������ѧ��������֪ʶ��רҵ��������������з�����˼�����������߶�רҵ֪ʶ�������Լ�������˼ά������
1.2ʵ��Ҫ��
ʵ�ֲ���������涨���ٶ���ת����ת��ת��ָ���ĽǶȣ�Ҫ�е㶯���ܡ���������ͨ���������룬������������й�����Ҫ��״̬������ָʾ��
1.3��������Ľ���
�������������һ�ָ�Ӧ��������Ĺ���ԭ�������õ��ӵ�·����ֱ�����ɷ�ʱ����ģ�����ʱ����Ƶ����������ֵ���Ϊ����������磬�������������������������������Ϊ���������ʱ����ģ�����ʱ�������
������Ȼ��������ѱ��㷺��Ӧ�ã��������������������ͨ��ֱ�������������� �ڳ�����ʹ�á���������˫���������źš����� ������·����ɿ���ϵͳ����ʹ�á�����úò��� ��� ȴ�����£����漰����е����������Ӽ������������רҵ֪ʶ��
�������������Ϊ ִ��Ԫ�� ���ǻ���һ�廯�Ĺؼ���Ʒ֮һ,�㷺Ӧ���ڸ����Զ�������ϵͳ�С��������Ӻͼ���������ķ�չ��������������������վ������ڸ�������������Ӧ�á�
���������һ�ֽ�������ת��Ϊ��λ�Ƶ�ִ�л�����ͨ��һ�㽲�����������������յ�һ�������źţ�������������������趨�ķ���ת��һ���̶��ĽǶȣ��������ǣ���������ͨ������������������ƽ�λ�������Ӷ��ﵽȷ��λ�� Ŀ�� ��ͬʱ������ͨ����������Ƶ�������Ƶ��ת�����ٶȺͼ��ٶȣ��Ӷ��ﵽ���ٵ�Ŀ�ġ�

ͼ1 �����������ͼ
1.4�о�˼·
1���˽ⵥƬ�������ڲ�Ӧ�е���Դ���磺�жϡ���ʱ������������I\O��ʹ�á�
2���˽ⲽ������Ĺ���ԭ�������á�
3�����ݲ��������ԭ�������������䵥Ƭ���ڲ���Դ�������ݵ�Ƭ������Դ����ʵ��Ӳ����·������Լ���������ı�д��
4���������Լ�����Ϥ�Ķ������������ϡ�
5������ƺõ�Ƭ���������ʱ��Ҫѧ�������·�г��ֵ����⣬���ú��ܽᡣ
�ڶ��� Ӳ�����
2.1 ��Ƭ���ļ��
��Ƭ���������������֮�����ŵ���ʱ�����������ǽ�������������ʵ�����Զ����ƻ�е���Զ��� ���������Զ������������������ȥ���ÿһ���Զ��Ĺ��̣�������Щ�����Լ���Դ���ҷѣ������ø����㣬��С�������ܵ��ʹ�������������ҵ�ֳ��IJ�����������������ش����壻���ο�Ŀǰ���ʵ磬���䣬�յ���¼�����VCD��ң ��������Ϸ�����緹�ҵ���������Ƭ����Ӱ�ӣ����Ե�Ƭ��������������ǵ�������ȡ�����͵ļ������
���ڵ�Ƭ����Ҫ����;�������Ͽɷ�Ϊ�����ࣺ 1--ͨ���͵�Ƭ�� 2--ר���͵�Ƭ��
ר���͵�Ƭ����ָ��;�Ƚ�רһ������ʱ�����Ѿ�һ���Թ̻��ã� �������õĵ�Ƭ����������ӱ���ĵ�Ƭ���������е�һ�֡� �������ɱ��ܵ͡�
ͨ���͵�Ƭ������;�ܹ㷺��ʹ�ò�ͬ�Ľӿڵ�·�����Ʋ�ͬ��Ӧ �ó���Ϳ���ɲ�ͬ�Ĺ��ܡ�С�����õ��������DZ��������� �������������߶����õ�Ƭ����ʵ���Զ������ơ�
2.2 UIN2003
����ѡ��ULN2003���ɲ��������������·�����浫��������ULN2003�Ľṹ���ص㣺
ULN2003 �Ǹ���ѹ����������ֶٳ��У����߸���NPN ���ֶٹ���ɡ�
�õ�·���ص����£�
ULN2003 ��ÿһ�Դ��ֶٶ�����һ��2.7K �Ļ�������,��5V �Ĺ�����ѹ��������TTL ��CMOS ��·ֱ������������ֱ�Ӵ���ԭ����Ҫ���������������������ݡ�
ULN2003 ������ѹ�ߣ���������������ɴ�500mA�������ܹ��ڹ�̬ʱ����50V �ĵ�ѹ������������ڸ߸��ص����������С�
ULN2003����ͼ��ͼ2��ʾ��
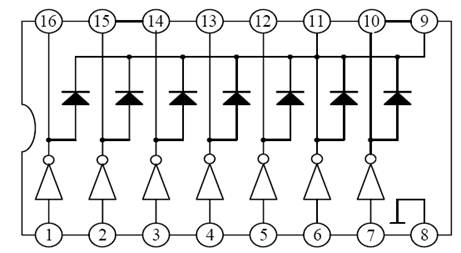
ͼ2 ULN2003�ڲ�����ͼ
����ULN2003�Լ�AT89C54RD��ƵIJ������������·��ͼ3��ʾ��
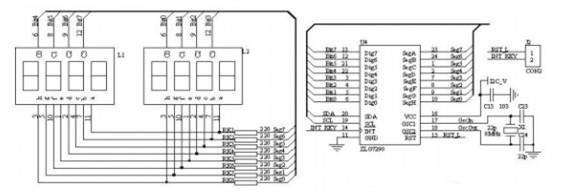
2.3 ZLG7290
2.3.1 7290����ԭ��
ZLG7290�ĺ�����һ��ZLG7290BоƬ��������I2C�ӿڣ���ֱ������8λ����ʽ����ܣ�ͬʱ��ɨ��������64ֻ������ʵ���˻��Ի��Ĺ�����Դʮ�ַḻ���������Զ��������������⣬�������ж���˸���ε�������Ϩ�𡢹��ܼ���������������ǿ���ܣ������ṩ10�����ֺ�21����ĸ��������ʾ���ܣ��û�����ֱ������ʾ����д����ʾ���ݣ������������Ԫ������ֱ����������ܣ�������չ������ѹ�͵��������⣬ZLG7290B�ĵ�·��ʹ��Ҳ�ܷ��㡣�û�����ij����ʱ��ZLG7290��INT���Ż����һ���͵�ƽ���ж������źţ���ȡ��ֵ���ж��źžͻ��Զ���������������£�������ֻ��Ҫ�ж�INT���žͿ��Եõ������������Ϣ����������ͨ�����ַ�ʽ�õ��û��ļ���������Ϣ����һ���жϷ�ʽ���÷�ʽ���ŵ��ǿ���������ǿ��ȱ����Ҫռ����������һ���ⲿ�ж�Դ������Dz�ѯ��ʽ����ͨ�����ϲ�ѯINT�������ж��Ƿ��м����£��÷�ʽ���Խ�ʡ��������һ��I��O���ߣ����Ǵ�����I2C���ߴ���Ƶ���Ļ״̬�����ĵ����ಢ�Ҳ����ڿ����š�
2.3.2 7290����ͼ
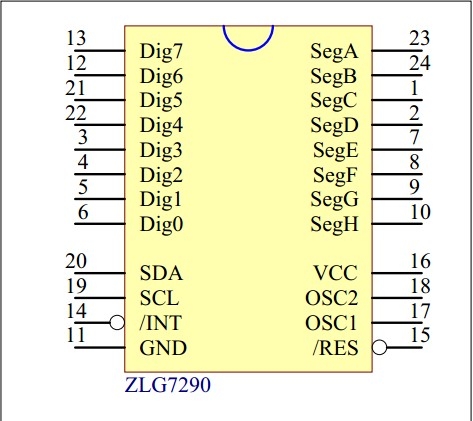
ͼ3 7290����ͼ
���������ͼ��
3.1 �����·ͼ

3.2 7290���������
3.3 ��������ͼ
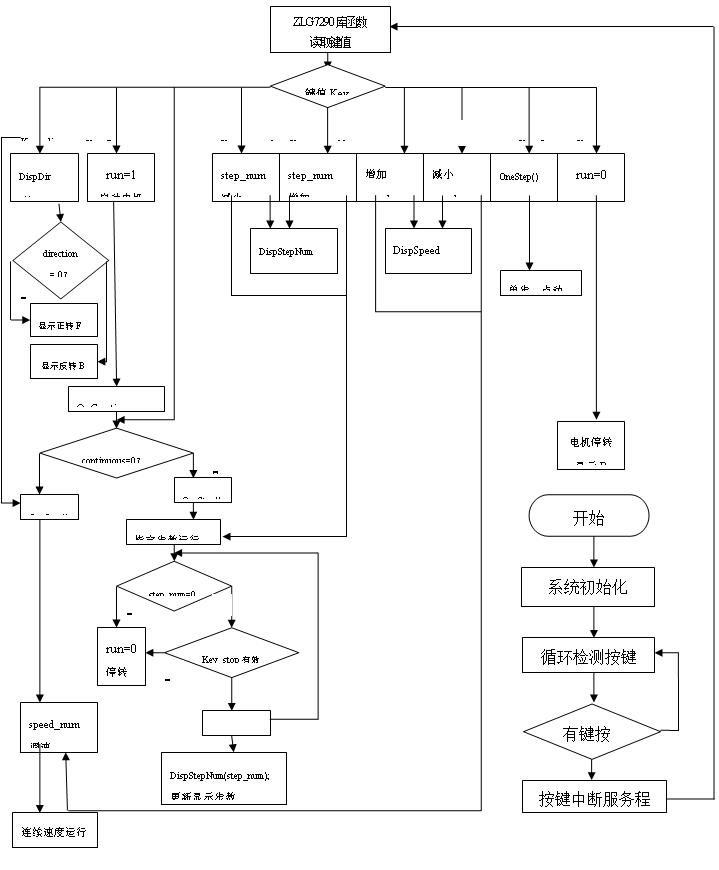
3.3.1���ƿ�ͼ
3.3.2 ����ͼ
������ ����
1�� ����ʵ��ԭ��ͼ���Ӻõ�·ͼ����
2�� ����ԭ��ͼ��д����
3�� ��·�ϵ磬���Գ��۲첢���Ƶ��ʹ�䰴��Ԥ�ڵ���Ϊ��������
4�� ���������ͨ��������������ת�Ӽ��١���ת�Ӽ��ٳ��㶯���Խ�������
5�� �Ż���������ʵ������
�ܵ���˵�����̱Ƚ�˳����ֻ�Ǵ���֮�£����߳����˴����ڴˣ��ҽ�������̵����Ҽ��ֺ��������ھ�����ʦ��֪������������ʵ����ʵ��Ҫ��Ĺ��ܣ���ʵ������ת�������仯���㶯�ȡ�
������ �ջ����
�����ǹ��ڿ����ѡ��ʼ������һ���������������鿴���Ϻ��ּ�����Ĺ���ʵ�ֱȽϵĸ��ӣ�����εĿγ����ʱ��Ƚ϶̣��ʷ���������뷨����������ɸѡ������������������������ƣ��������ָ�����ϵ����ݾ���ʵ�ֲ�������DZȽϵļģ�������������ʼ���֮��ŷ��ֲ�û����������ô�ļ�
��ѧ�ڵ����κ͵�Ƭ����û��ôѧ�ã��ʸо�����������ʱ�е����ѣ������������������c����д�������������ɵ㣬����Ƴ������漰�����жϳ���ı�д��������ѧ������֪ʶ��ȫ�ò�������Ҳ���������������ʱ��Ľ�������ڼ���˵�Ƭ�����ж�֪ʶ������Ӧ�ij����д��
ͨ����ογ����ʵ��,�ҶԲ���������ٿ���ϵͳ����ʵ�ʵ��˽����ʶ,����˶�������������ʵ����鱾�ϡ�������ѧ����֪ʶ�������õ�ʵ�ʵ�ʵ����,�о��Ƕ�ѧ�����õ�һ�ֶ����Ϳ��骣���������ѧ֪ʶ���ʵ�����������,������̵Ķ�֪ʶ����������ա����Ƶ�·��������·�����ٷ�����·�������������ģ�������,Ҳʵ����������Լ���ϵͳ����ʶ,����Щ����ĸ����˼ά�ۡ� ʵ�����ŶӺ�����ɵ�,����Ƶ�·���������,Ȼ����浽��Ӳ����������Ҫ��Ŀ���ϵͳ,������ʵ���ж����˶�����������ѧ�����ŶӺ���,����ѧϰ,����Լ���
��εĿγ�����ܵĸо����Ǻ��ۣ����ڲ��ϵ�ѧϰ��ʵ������ѧ���˺ܶණ����֪ʶ���������������ģ��жϣ���·��������ص�֪ʶ���ǵõ���������Ȼ����Ǹ��˴���������������ߣ���Ȼ˵��ε���Ʋ���һ�������Ŀ����Ҳ����С�ij��Σ������ѡ��ǰ�ڵ��������۵�ʵ����֪ʶ����ߣ�����ʵ�����⼰���ڵ��ܽ���ɡ�
����ȥ�ջ������dz����ȵģ���εĿγ�����еõ��˳�ֵ����֡�
�ܵ���˵�������ƵIJ���������Ƶ�·���DZȽϳɹ��Ī�������������˺ܶ����⣬������Լ���˼���£�������һ�����ҵ�̽���£�����������⣬�е�СС�ijɾУ����ھ���ƽʱ��ѧ��֪ʶ����ʵ�õļ�ֵ���ﵽ��������ʵ�����ϵ�Ŀ�ġ�����ѧ���˲���֪ʶ�����Ҷ������Լ���������ʹ�Լ����Ժ��·���˸����������ʶ��ͬʱ����δ�����˸�������ġ��������ʦ��ʾ���ĵĸ�л����ʦ���������ˡ���
��¼��һ��ϵͳ����
������
/************************************************************************
����51��Ƭ�����첽������Ƴ���
************************************************************************/
#include<reg51.h>
#include "VIIC_C51.H"
#include "ZLG7290.h"
#define uchar unsigned char
#define uint unsigned int
/*���ಽ���綯������˫��������״̬��
11111110 0FEH A
11111100 0FCH AB
11111101 0FDH B
11111001 0F9H BC
11111011 0FBH C
11110011 0F3H CD
11110111 0F7H D
11110110 0F6H DA
*/
sbit PA=P1^0; //P1���Ƶ��
sbit PB=P1^1;
sbit PC=P1^2;
sbit PD=P1^3;
sbit RST=P1^4;
sbit KEY_INT=P3^2; //���Ƿ����ΪP3^2
sbit SCL=P1^6;
sbit SDA=P1^7;
uchar code step_tab[9]={0xff,0xfe,0xfc,0xfd,0xf9,0xfb,0xf3,0xf7,0xf6};
uint code delaytime[4] = {60,40,20,10};//��ʱʱ���б�
//�����Ķ���
uchar direction; //״̬���� 0������1������
uchar continuous; //״̬���� 0��ָ���������У�1�������ٶ�����
uchar run; //״̬���� 0�����δ���У�1�����������
uchar speed_num; //�����ٶ����б��1-4
uchar cur_step; //��������״̬
uchar step_num; //ָ�����еIJ�������Χ0-99
//��ֵ����
#define Key_dir 1 //�����
#define Key_Run 2 //������
#define Key_stop 3 //ֹͣ��
#define Ket_Step 4 //�������м�
#define Key_step_add 5 //�����Ӽ�
#define Key_step_sub 6 //��������
#define Key_speed_add 7 //�ٶȼӼ�
#define Key_speed_sub 8 //�ٶȼ���
#define Key_Con_Set 9 //����������ָ�����������л�����
//��������жϱ�־��FlagINT0=1 ��ʾ�м�����
volatile bit FlagINT0 = 0;
void KeyProsess( uchar key );
/************************************************************************
������INT0_SVC()
���ܣ�ZLG7290 �����жϷ������
˵�����жϴ�����ʽѡ���ش�������˲��صȴ��ж������źŻָ�Ϊ�ߵ�ƽ
************************************************************************/
void INT0_SVC() interrupt 0
{
unsigned char KeyValue;
//��ȡ��ֵ
KeyValue=ZLG7290_GetKey();
//������ֵ
KeyProsess(KeyValue);
}
/************************************************************************
������Delay()
���ܣ���ʱ��ʵ����ʱtms
************************************************************************/
void Delay(unsigned int t)
{
do
{ //TH��64536
TH1 = 0xFC;
TL1 = 0x18;
TR1 = 1; //������ʱ��T1���ȴ��ж�
while ( !TF1 );
TF1 = 0; //������������
TR1 = 0; //ֹͣT1��ʱ��
} while (--t);
}
/************************************************************************
������DispDir()
���ܣ���ʾ�����ӳ���
˵����dat 0 ����1����
************************************************************************/
void DispDir(uchar dat)
{
if(dat == 0)
{
ZLG7290_SendCmd(0x60+7,0x0f); //"F" ��ʾ��ת
}
else
{
ZLG7290_SendCmd(0x60+7,0x0b); //"B"��ʾ��ת
}
}
/************************************************************************
������DispSpeed()
���ܣ���ʾ�ٶȺ��ӳ���
˵����dat 1~4 �������ֲ�ͬ���ٶ�
************************************************************************/
void DispSpeed(uchar dat)
{
ZLG7290_SendCmd(0x60+5,dat);
}
/************************************************************************
������DispStepNum()
����:��ʾ���в����ų���
˵�������ʵ��ת��ָ���Ƕ�=�����*����
************************************************************************/
void DispStepNum(uchar dat)
{
unsigned char d;
d = dat / 10;
ZLG7290_SendCmd(0x60+1,d);
d = dat - d * 10;
ZLG7290_SendCmd(0x60+0,d);
}
/************************************************************************
������DispContinuous()
���ܣ���ʾ����״̬����������ָ������
˵����0��ָ���������У�1�������ٶ�����
************************************************************************/
void DispContinuous(uchar dat)
{
if(dat == 0)
{
ZLG7290_SendCmd(0x60+3,0x0d); //'d'��ʾָ����������״̬
}
else
{
ZLG7290_SendCmd(0x60+3,0x0c); //'C'��ʾ�����ٶ�����
}
}
/************************************************************************
������OnStep()
���ܣ�ʵ�ֵ�������
************************************************************************/
void OneStep()
{
if(direction == 0)
{//����
if(cur_step == 8)
{
cur_step = 1;
}else
{
cur_step ++;
}
P1 = step_tab[cur_step]; //���
}
else
{
if(cur_step <= 1)
{
cur_step = 8;
}else
{
cur_step --;
}
P1 = step_tab[cur_step]; //���
}
}
/***************************************************************************
������OnContinue()
���ܣ���������
***************************************************************************/
void OnContinue()
{
if(continuous != 0)
{//��������
while(run!=0)
{
OneStep();
Delay(delaytime[speed_num-1]);//�ӳ� Ŀ�ĸı�ת��
}
}
else
{//ָ����������
if(step_num != 0)
{
OneStep();
Delay(50); //50ms �ӳ�
step_num--;
DispStepNum(step_num); //������ʾ���� ����ʾʣ��û��ִ�еIJ���
if(run == 0) return; //��ֹͣ�����£���ֹͣ
}
else
{
run = 0; //ֹͣ
return;
}
}
}
/****************************************************************************
������KeyProsess()
���ܣ���ֵ��������
****************************************************************************/
void KeyProsess( uchar key )
{
switch(key)
{
case Key_dir : //�����
if(run==0)
{
if(direction == 0)
direction =1;
else
direction = 0;
DispDir(direction);
}
break;
case Key_Run : //������
if(run ==0)
{
run =1;
}
break;
case Key_stop: //ֹͣ��
if(run !=0)
{
run =0;
}
break;
case Ket_Step: //�������м� ʵ�ֵ㶯����
if(run ==0)
{
run =1;
OneStep();
run =0;
}
break;
case Key_step_add: //�����Ӽ� n=(�����*60)/(360*t*0.001) ��λr/min
if(run ==0)
{
if(step_num == 99)
{
step_num = 0;
}else
{
step_num ++;
}
DispStepNum(step_num);
}
break;
case Key_step_sub: //��������
if(run ==0)
{
if(step_num == 0)
{
step_num = 99;
}else
{
step_num --;
}
DispStepNum(step_num);
}
break;
case Key_speed_add: //�ٶȼӼ�
if(run ==0)
{
if(speed_num == 4)
{
speed_num = 1;
}else
{
speed_num ++;
}
DispSpeed(speed_num);
}
break;
case Key_speed_sub: //�ٶȼ���
if(run ==0)
{
if(speed_num == 1)
{
speed_num = 4;
}else
{
speed_num --;
}
DispSpeed(speed_num);
}
break;
case Key_Con_Set : //����������ָ�����������л�����
if(run ==0)
{
if(continuous == 0)
{
continuous = 1;
}else
{
continuous = 0;
}
DispContinuous(continuous);
}
break;
default:
break;
}
}
/**********************************************************************************
������SystemInit()
���ܣ�ϵͳ��ʼ��
**********************************************************************************/
void SystemInit()
{ //��ʼ����Ƭ��
TMOD = 0x11; //��ʱ�����ã�T0��T1��ʽ1��16λ��ʱ��
Delay(300); //��ʱ300ms�ȴ�ZLG7290 ��λ���
EA = 0;
IT0 = 1; //INT0,�����ش����ж�
EX0 = 1; //�����ⲿ�ж�INT0
FlagINT0 =0;
EA = 1;
//��ʼ���������������
direction = 0; //״̬���� 0������1������
continuous =0; //״̬���� 0��ָ���������У�1�������ٶ�����
run = 1; // ״̬���� 0�����δ���У�1�����������
speed_num =1; // �����ٶ����б��1-4
cur_step =0; // ��������״̬
step_num = 0; // ָ�����еIJ�������Χ0-99
DispContinuous(continuous);
DispStepNum( step_num);
DispSpeed(speed_num );
DispDir(direction );
P1 = step_tab[cur_step]; //���
}
/*********************************************************************************
������main()
**********************************************************************************/
void main(void)
{
SystemInit(); //ϵͳ��ʼ��
while(1) //ѭ����ⰴ��״̬
{
if(run ==1)
{
OnContinue();
}
}
}
�⺯������
/********************************************************************
VIIC_C51.C
�˳�����I2C����ƽ̨������ʽ������ƽ̨���ĵײ��C�ӳ���,�緢������
����������,Ӧ��λ����,���ṩ�˼���ֱ����������IJ������������ܷ����
���û��������Ӳ���չ.....
ע��:�����Dz���������ʱ�ķ�������SCL����,�̶Ը߾���Ƶ��Ҫ��
һ������....(������1us��������,������Ƶ��ҪС��12MHZ)
********************************************************************/
#include <reg52.h> /*ͷ�ļ��İ���*/
#include <intrins.h>
#define uchar unsigned char /*�궨��*/
#define uint unsigned int
#define _Nop() _nop_() /*�����ָ��*/
/* ��,���������� */
/*�˿�λ����*/
sbit SDA=P1^7; /*ģ��I2C���ݴ���λ*/
sbit SCL=P1^6; /*ģ��I2Cʱ�ӿ���λ*/
/*״̬��־*/
bit ack; /*Ӧ���־λ*/
/*******************************************************************
�����ߺ���
����ԭ��: void Start_I2c();
����: ����I2C����,������I2C��ʼ����.
********************************************************************/
void Start_I2c()
{
SDA=1; /*������ʼ�����������ź�*/
_Nop();
SCL=1;
_Nop(); /*��ʼ��������ʱ�����4.7us,��ʱ*/
_Nop();
_Nop();
_Nop();
_Nop();
SDA=0; /*������ʼ�ź�*/
_Nop(); /* ��ʼ��������ʱ�����4��s*/
_Nop();
_Nop();
_Nop();
_Nop();
SCL=0; /*ǯסI2C���ߣ������ͻ�������� */
_Nop();
_Nop();
}
/*******************************************************************
�������ߺ���
����ԭ��: void Stop_I2c();
����: ����I2C����,������I2C��������.
********************************************************************/
void Stop_I2c()
{
SDA=0; /*���ͽ��������������ź�*/
_Nop(); /*���ͽ���������ʱ���ź�*/
SCL=1; /*������������ʱ�����4��s*/
_Nop();
_Nop();
_Nop();
_Nop();
_Nop();
SDA=1; /*����I2C���߽����ź�*/
_Nop();
_Nop();
_Nop();
_Nop();
}
/*******************************************************************
�ֽ����ݴ��ͺ���
����ԭ��: void SendByte(uchar c);
����: ������c���ͳ�ȥ,�����ǵ�ַ,Ҳ����������,�����ȴ�Ӧ��,����
��״̬λ���в���.(��Ӧ����Ӧ��ʹack=0 ��)
��������������ack=1; ack=0��ʾ��������Ӧ�����
********************************************************************/
void SendByte(uchar c)
{
uchar BitCnt;
for(BitCnt=0;BitCnt<8;BitCnt++) /*Ҫ���͵����ݳ���Ϊ8λ*/
{
if((c<<BitCnt)&0x80)SDA=1; /*�жϷ���λ*/
else SDA=0;
_Nop();
SCL=1; /*��ʱ����Ϊ�ߣ�֪ͨ��������ʼ��������λ*/
_Nop();
_Nop(); /*��֤ʱ�Ӹߵ�ƽ���ڴ���4��s*/
_Nop();
_Nop();
_Nop();
SCL=0;
}
_Nop();
_Nop();
SDA=1; /*8λ��������ͷ������ߣ�������Ӧ��λ*/
_Nop();
_Nop();
SCL=1;
_Nop();
_Nop();
_Nop();
if(SDA==1)ack=0;
else ack=1; /*�ж��Ƿ���յ�Ӧ���ź�*/
SCL=0;
_Nop();
_Nop();
}
/*******************************************************************
�ֽ����ݴ��ͺ���
����ԭ��: uchar RcvByte();
����: �������մ���������������,���ж����ߴ���(����Ӧ���ź�)��
���������Ӧ������
********************************************************************/
uchar RcvByte()
{
uchar retc;
uchar BitCnt;
retc=0;
SDA=1; /*��������Ϊ���뷽ʽ*/
for(BitCnt=0;BitCnt<8;BitCnt++)
{
_Nop();
SCL=0; /*��ʱ����Ϊ�ͣ�����������λ*/
_Nop();
_Nop(); /*ʱ�ӵ͵�ƽ���ڴ���4.7��s*/
_Nop();
_Nop();
_Nop();
SCL=1; /*��ʱ����Ϊ��ʹ��������������Ч*/
_Nop();
_Nop();
retc=retc<<1;
if(SDA==1)retc=retc+1; /*������λ,���յ�����λ����retc�� */
_Nop();
_Nop();
}
SCL=0;
_Nop();
_Nop();
return(retc);
}
/********************************************************************
Ӧ���Ӻ���
ԭ��: void Ack_I2c(bit a);
����:����������Ӧ���ź�,(������Ӧ����Ӧ���ź�)
********************************************************************/
void Ack_I2c(bit a)
{
if(a==0)SDA=0; /*�ڴ˷���Ӧ����Ӧ���ź� */
else SDA=1;
_Nop();
_Nop();
_Nop();
SCL=1;
_Nop();
_Nop(); /*ʱ�ӵ͵�ƽ���ڴ���4��s*/
_Nop();
_Nop();
_Nop();
SCL=0; /*��ʱ���ߣ�ǯסI2C�����Ա��������*/
_Nop();
_Nop();
}
/*******************************************************************
�����ӵ�ַ���������ֽ����ݺ���
����ԭ��: bit ISendByte(uchar sla,ucahr c);
����: ���������ߵ����͵�ַ�����ݣ��������ߵ�ȫ����,��������ַsla.
�������1��ʾ�����ɹ��������������
ע�⣺ ʹ��ǰ�����ѽ������ߡ�
********************************************************************/
bit ISendByte(uchar sla,uchar c)
{
Start_I2c(); /*��������*/
SendByte(sla); /*����������ַ*/
if(ack==0)return(0);
SendByte(c); /*��������*/
if(ack==0)return(0);
Stop_I2c(); /*��������*/
return(1);
}
/*******************************************************************
�����ӵ�ַ�������Ͷ��ֽ����ݺ���
����ԭ��: bit ISendStr(uchar sla,uchar suba,ucahr *s,uchar no);
����: ���������ߵ����͵�ַ���ӵ�ַ,���ݣ��������ߵ�ȫ����,������
��ַsla���ӵ�ַsuba������������sָ������ݣ�����no���ֽڡ�
�������1��ʾ�����ɹ��������������
ע�⣺ ʹ��ǰ�����ѽ������ߡ�
********************************************************************/
bit ISendStr(uchar sla,uchar suba,uchar *s,uchar no)
{
uchar i;
Start_I2c(); /*��������*/
SendByte(sla); /*����������ַ*/
if(ack==0)return(0);
SendByte(suba); /*���������ӵ�ַ*/
if(ack==0)return(0);
for(i=0;i<no;i++)
{
SendByte(*s); /*��������*/
if(ack==0)return(0);
s++;
}
Stop_I2c(); /*��������*/
return(1);
}
/*******************************************************************
�����ӵ�ַ�������ֽ����ݺ���
����ԭ��: bit IRcvByte(uchar sla,ucahr *c);
����: ���������ߵ����͵�ַ�������ݣ��������ߵ�ȫ����,��������
ַsla������ֵ��c.
�������1��ʾ�����ɹ��������������
ע�⣺ ʹ��ǰ�����ѽ������ߡ�
********************************************************************/
bit IRcvByte(uchar sla,uchar *c)
{
Start_I2c(); /*��������*/
SendByte(sla+1); /*����������ַ*/
if(ack==0)return(0);
*c=RcvByte(); /*��ȡ����*/
Ack_I2c(1); /*���ͷǾʹ�λ*/
Stop_I2c(); /*��������*/
return(1);
}
/*******************************************************************
�����ӵ�ַ������ȡ���ֽ����ݺ���
����ԭ��: bit ISendStr(uchar sla,uchar suba,ucahr *s,uchar no);
����: ���������ߵ����͵�ַ���ӵ�ַ,�����ݣ��������ߵ�ȫ����,������
��ַsla���ӵ�ַsuba�����������ݷ���sָ��Ĵ洢������no���ֽڡ�
�������1��ʾ�����ɹ��������������
ע�⣺ ʹ��ǰ�����ѽ������ߡ�
********************************************************************/
bit IRcvStr(uchar sla,uchar suba,uchar *s,uchar no)
{
uchar i;
Start_I2c(); /*��������*/
SendByte(sla); /*����������ַ*/
if(ack==0)return(0);
SendByte(suba); /*���������ӵ�ַ*/
if(ack==0)return(0);
Start_I2c();
SendByte(sla+1);
if(ack==0)return(0);
for(i=0;i<no-1;i++)
{
*s=RcvByte(); /*��������*/
Ack_I2c(0); /*���;ʹ�λ*/
s++;
}
*s=RcvByte();
Ack_I2c(1); /*���ͷ�Ӧλ*/
Stop_I2c(); /*��������*/
return(1);
}
/* ��� */
7290��������ܳ���
/****************************************Copyright (c)**************************************************
** ������������Ƭ����չ����˾
** �� �� ��
** ��Ʒһ��
**
** http://www.zlgmcu.com
**
**--------------�ļ���Ϣ--------------------------------------------------------------------------------
**�� �� ��: ZLG7290.C
**�� �� ��: Ҷ���
**���������: 20##-3-4
**�� ��: ZLG7290�⺯������
**
**--------------��ʷ�汾��Ϣ----------------------------------------------------------------------------
** ������: Ҷ���
** �� ��: 0.01
** �ա���: 20##-3-4
** �衡��: ZLG7290�⺯������
**
**------------------------------------------------------------------------------------------------------
** ����:
** �� ��:
** �ա���:
** �衡��:
**
**--------------��ǰ�汾��------------------------------------------------------------------------------
** ����:
** �ա���:
** �衡��:
**
**------------------------------------------------------------------------------------------------------
********************************************************************************************************/
#include "REG52.h"
#include "viic_c51.h"
#define zlg7290 0x70 //ZLG7290��IIC��ַ
#define SubKey 0x01
#define SubCmdBuf 0x07
#define SubDpRam 0x10
/*********************************************************************************************************
** ��������: DelayNS
** ��������: ��������ʱ
** �䡡��: i : ��ʱ������ֵԽ��ʱ��ʱԽ��
**
** �䡡��: ��
** ȫ�ֱ���: ��
** ����ģ��: ��
**
** ������: Ҷ���
** �ա���: 20##-3-4
**-------------------------------------------------------------------------------------------------------
** ����:
** �ա���:
**------------------------------------------------------------------------------------------------------
********************************************************************************************************/
void delayMS(unsigned char i)
{
unsigned char j,k;
for(k=0;k<i;k++)
for(j=0;j<60;j++);
}
/*********************************************************************************************************
** ��������: ZLG7290_SendData
** ��������: ��������
** �䡡��:SubAdd : ��������
** DATA : ����ֵ
**
** �䡡��: 0 �� Fail
** 1 : OK
** ȫ�ֱ���: ��
** ����ģ��: delayMS
**
** ������: Ҷ���
** �ա���: 20##-3-4
**-------------------------------------------------------------------------------------------------------
** ����:
** �ա���:
**------------------------------------------------------------------------------------------------------
********************************************************************************************************/
unsigned char ZLG7290_SendData(unsigned char SubAdd,unsigned char Data)
{
if(SubAdd>0x17)
return 0;
ISendStr(zlg7290,SubAdd,&Data,1);
delayMS(10);
return 1;
}
/*********************************************************************************************************
** ��������: ZLG7290_SendCmd
** ��������: ����������ӵ�ַ7��8��
** �䡡��:DATA1 : ����1
** DATA2 : ����2
**
** �䡡��: 0 �� Fail
** 1 : OK
** ȫ�ֱ���: ��
** ����ģ��: ISendStr��delayMS
**
** ������: Ҷ���
** �ա���: 20##-3-4
**-------------------------------------------------------------------------------------------------------
** ����:
** �ա���:
**------------------------------------------------------------------------------------------------------
********************************************************************************************************/
unsigned char ZLG7290_SendCmd(unsigned char Data1,unsigned char Data2)
{
unsigned char Data[2];
Data[0]=Data1;
Data[1]=Data2;
ISendStr(zlg7290,0x07,Data,2);
delayMS(10);
return 1;
}
/*********************************************************************************************************
** ��������: ZLG7290_SendBuf
** ��������: ����ʾ��������������
** �䡡��: * disp_buf : Ҫ�������ݵ���ʼ��ַ
** num : ������
**
** �䡡��: ��
** ȫ�ֱ���: ��
** ����ģ��: ZLG7290_SendCmd
**
** ������: Ҷ���
** �ա���: 20##-3-4
**-------------------------------------------------------------------------------------------------------
** ����:
** �ա���:
**------------------------------------------------------------------------------------------------------
********************************************************************************************************/
void ZLG7290_SendBuf(unsigned char * disp_buf,unsigned char num)
{
unsigned char i;
for(i=0;i<num;i++)
{
ZLG7290_SendCmd(0x60+i,*disp_buf);
disp_buf++;
}
}
/*********************************************************************************************************
** ��������: ZLG7290_GetKey
** ��������: ��ȡ��ֵ
** �䡡��: ��
**
** �䡡��: >0 ��ֵ
** =0 ������
** ȫ�ֱ���: ��
** ����ģ��: IRcvStr��delayMS
**
** ������: Ҷ���
** �ա���: 20##-3-4
**-------------------------------------------------------------------------------------------------------
** ����:
** �ա���:
**------------------------------------------------------------------------------------------------------
********************************************************************************************************/
unsigned char ZLG7290_GetKey()
{
unsigned char rece;
rece=0;
IRcvStr(zlg7290,1,&rece,1);
delayMS(10);
return rece;
}
��¼�������ο�����
[1] �γ��� ��Ƭ��ԭ�����ӿڼ��� [M].�廪��ѧ������ 2008.7��1��
[2] �����ӡ��������������綯��������������ϵͳ [M].1997��11�µ�һ��
[3] �����С���Ԫ�� 51��Ƭ������������������� [M].�����ʵ������2009.10�ڶ���
[4] ʷ���ƣ� �����綯���ŷ����Ƽ���[M] .20##��3�µ�2��