实验法测量物体重心实验报告书
试验设备名称:
实验内容:1、悬吊法;
2、称量法;
3、观察渐加荷载、突加荷载、冲击荷载、振动荷载;
试验方法:
1、悬吊法:对组合型钢悬吊两次,利用二力平衡原理,用一张A4纸图示出重心位置。对于学习过CAD绘图的同学,可以相机成像后输入到计算机内,用CAD绘图技术找出重心位置。
实验结果的图形附于报告后。
2、称量法:连杆重量超出弹簧秤的称量范围,此时要称出连杆的重量,并确定其重心,就要应用理论力学中的合力矩定理。
1)首先将弹簧秤的托盘拿下,将弹簧秤调零;
2)将连杆两端分别放置在弹簧秤的中心,并将连杆侧放,支撑点对准弹簧秤的中心;
3)通过积木块,设法调整支撑点连线水平,记下弹簧秤的读数 和
和 ;
;
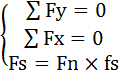
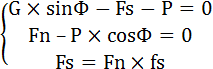
4)根据平衡方程: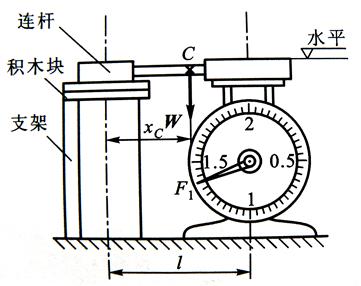
 ,
, ,
,
即可得到连杆重量和重心位置。

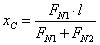
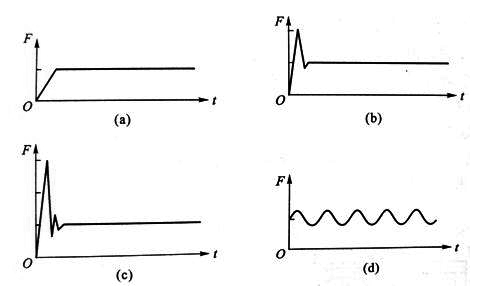
3、观察渐加荷载、突加荷载、冲击荷载、振动荷载:
将合适重量的物体分别缓慢放入、突然放入、从高处突然松手落入、放入有偏心块转动的电机,观察a)渐加荷载、b)突加荷载、c)冲击荷载、d)振动荷载的特点,并简单画出荷载与时间的函数关系图。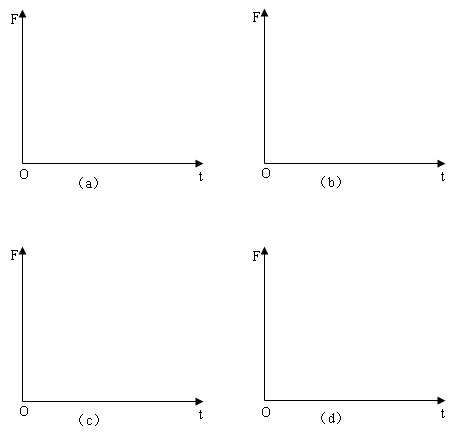
测量动滑动摩擦因数实验报告书
试验设备名称:
实验内容:测量摩擦角;
测量动滑动摩擦因数;
试验方法:
1、测量摩擦角:
两名同学合作,在摩擦测试仪底板上放置好摩擦块,缓慢抬升摩擦测试仪底板,使其倾角慢慢增加,增加到某一角度,物块开始下滑,记下此时摩擦测试仪底板的倾角 ;反复实验5次,求出平均值
;反复实验5次,求出平均值 ,此即摩擦角,并计算静摩擦因数:
,此即摩擦角,并计算静摩擦因数:
 =
=
2、 测量动滑动摩擦因数:
测量动滑动摩擦因数:
1)实验装置:
如图所示
A:试块甲
B:倾角为φ的被测试材料
C:试块甲上的不透光档距,s1=3cm
L1,L2:光电管
D:CDY-1智能计量仪
t1(或仪器上的Δt1)为计量器上显示物块A经过光电管L1时通过路程s1的时间,t2(或仪器上的Δt2)为显示物块A经过光电管L2时通过路程s1的时间,t4=t3+(t2-t1)/2,t3为从L1到L2的路程所需的时间。
2)实验原理:
根据以上叙述可知,物块的加速度为:
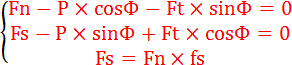
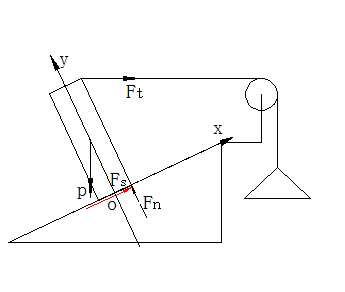
动滑动摩擦因数计算公式推导;由下图写出y方向的静力平衡方程和x方向的动力学方程,分别为
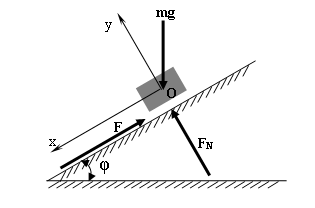
 ,
,
 ,
,
其中动摩擦力: 
故动摩擦因数为:

3)实验数据处理:
动摩擦因数受材料的温度湿度等因素影响,一般是某个范围内的随机数。因此对实验数据的选择需要有一个原则,即取相对比较集中的数据,去掉离散性较大的大数和小数。然后在选取的10组数据中,计算最大值 、最小值
、最小值 和平均值
和平均值 。 则所测两种材料间的动摩擦因数的取值范围为:
。 则所测两种材料间的动摩擦因数的取值范围为:
 。
。
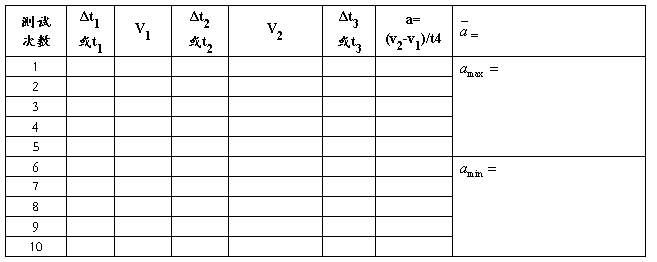
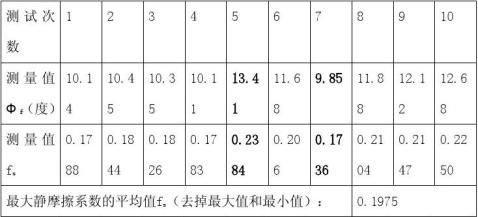
测量和计算数据填入下表:斜面倾角 =
=
动摩擦系数的平均值 =
=
动摩擦系数的最大值 = ;动摩擦系数的最小值
= ;动摩擦系数的最小值 =
=
附:四种荷载的图形参考;另附两组摩擦因数测量的实验数据,根据测算,动摩擦因数是一个范围量,允许所测加速度值有较大范围的变化,所以大家测得的数据均可应用!
注意,本页内容为大家写实验报告的指导,并非实验报告的内容,大家可以不打印!!!!
第二篇:理论力学摩擦实验报告书 吴云清
理论力学摩擦实验报告书
(说明:第一次的报告书由于误将第三个实验的外加力的方向当作水平造成计算结果出现错误,在于同组的同学的讨论后发现了自己的错误,这个报告是上次的勘误,还请老师理解。)
撰写人:
实验时间:
吴云清 学号:1152344 专业:数理强化班 20xx年10月13日星期六 8:30——10:00
实验目的:本次实验实际上测的是木材与铁之间的摩擦系数,实验通过最大静摩擦系数和滑动摩擦的计算以及由书本习题改编的翻转实验来加深对摩擦现象的定性认识和提高同学们的动手实践能力。
实验内容:本次实验共分为三个部分,分别是最大静摩擦系数的测量、动摩擦系数的测量和翻转实验。
实验器材:MC50摩擦实验装置,SANLINA CS-Z 智能数字测试器,砝码,下端为木材的滑块,滑轮,托盘等。
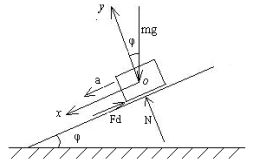
实验原理:
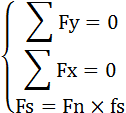
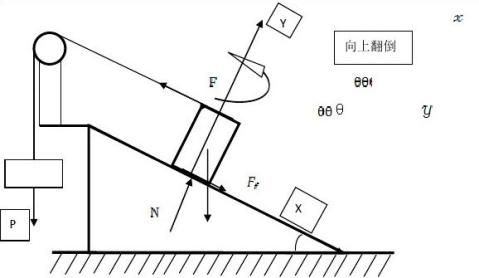
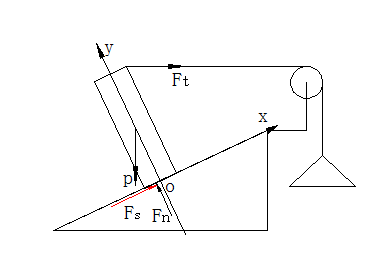
假设质量为m的滑块沿倾角为Φ的滑道滑下,以沿滑道向下的方向为x轴方向,垂直于滑道向上的方向为y轴方向,其受力分析右图所示。由于静摩擦系数 fs= tanθ(θ为摩擦角),因此当?>θ 时,滑块可沿滑道下滑。下面导出动摩擦系数的表达式。
∑ Fy=0, N=mgcosΦ ∑ Fx=ma,ma=mgsinΦ-Nfd
解得动摩擦系数的计算公式:
fd=tanΦ-a/(gcosΦ)
第三个拓展实验的实验原理见实验数据
的整理与分析。
实验步骤:一 最大静摩擦系数的测定
1. 打开装置的开关,并选择手动档;
2.
将滑块置于装置的滑道上(应用抹布将滑块与滑道都擦一下
一减小外部因素影响);
3. 手动调节摩擦实验装置是滑道的倾角缓缓增加,当滑块恰好开始滑动时记录下此时的倾角;
4. 如此重复得到十组数据。
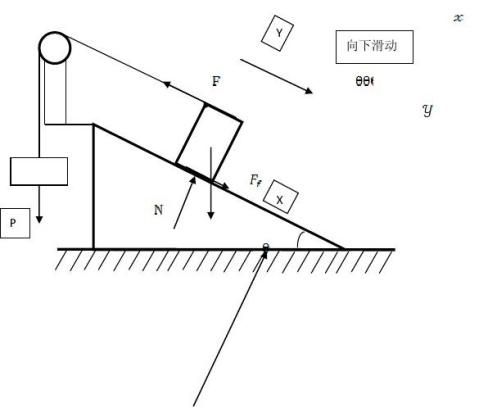
二 滑动摩擦系数的测定
1. 将滑道的倾角调整至适宜的角度(保证滑块可以顺利下滑,可选择机动档调整),并测试一下滑块在滑动过程中是否与光电门等仪器接触;
2. 打开数字测试器,将滑块由滑道的顶端释放;
3. 记录滑动过程中的加速度,重复测试十次,得到十组数据。
三 翻转实验
1. 将滑轮固定于滑道的水平端,并将绳子系于滑块的上端;
2. 不断向托盘中加入砝码直至滑块刚好向上翻转,记录下此时的砝码质量;
3. 逐渐减少托盘中砝码的质量直至滑块刚好向下滑,记录下此时托盘中砝码的质量。
注意事项:本次实验过程中老师一直都在强调实验器材的操作一定要规范,比如在调节滑道的角度时可以选用手动也可以选用机动,但是选择手动开关时一定要确保机动开关关闭了,如果两个开关同时按下可能会造成仪器的损坏。同时,在进行第二个实验时一定要有位同学用毛巾在低端接着防止滑块或装置受损。进行第三个实验时一定要几个同学协同合作,有一位同学手放在砝码
的不远处以防止托盘脱落而导致体形较小的砝码遗失。另一位同学要手放在滑块的不远处以防止滑块的掉落对仪器的损坏。 实验数据的记录与处理:
1、最大静摩擦系数的测定实验:
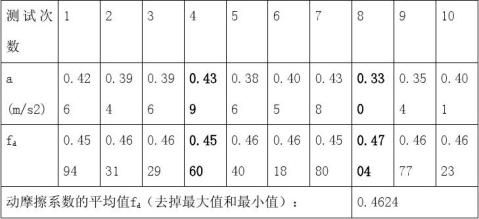
2、木与铁动摩擦系数的测定实验(取g =9.8m/s2): (注:Φ = 26.94°,tanΦ = 0.5082 , cosΦ = 0.8912 ) 3. 滑块上下滑动和翻倒实验(Φ = 25°,取g=9.8m/s2):
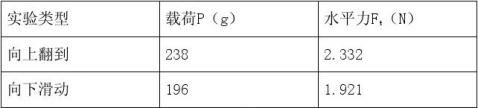

理论分析与计算:木块的信息:30*30*100(单位:mm)质量:680(单位:g)
向下滑时受力图向上翻有力矩平衡:
带入数据得P=2.314N 百分差为 :

由 ,可得
从而
所以
P = 1.624N 因此
百分误差为:δ =
以下是上次的错误做法:
解:
由
,可得
从而

所以
Ft = 1.640N 因此
百分误差为:δ

=
向上翻到时受力图:
解: h表示滑块的高度为100mm,b表示宽度为30mm 由

, 得

从而 Ft =
所以
Ft = 2.240N
因此
百分误差为:δ=
实验误差分析与心得体会:实验数据处理完我看到后的第一个反应可以用大跌眼镜来形容。原因就在于为什么动摩擦系数会比最大静摩擦系数大而且大那么多。由力学常识可以知道最大静摩擦系数会略大于滑动摩擦系数。所以这个实验测出来的数据是不准确的换句话来说是错的,错误的原因在何呢?首先在界定何为滑块将滑未滑的临界点时会有人为的测量误差,在测量这一临界点时我们小组只要观察到一点点扰动就记录下数据。这可能会使数据偏小。还有就是滑道的表面粗糙程度也是不尽相同的。很有可能我们实验的地方会由于长期实验而是最大静摩擦系数偏小。另外,在释放滑块时滑块与滑道是会有不断的碰撞的,这也就使得动摩擦系数偏大,而且应该会偏很大。
虽然做了一次失败的实验但是我学到的东西还是很多的,以前对于摩擦的认识只是书本上的定量计算和生活中的定性认识,实验之后还是发现了理论与实践的巨大反差。此外整个实验都是在我们小组成员的协同合作中完成的,我也明白的团队合作对实验的重要性。小组成员的实验过程中的相互监督和实验后的计算讨论都对自己的团队意识的培养大有裨益。失败并不可怕,我从失败中学到了知识就是值得的。