实验2——时域系统分析和线性系统的稳定性研究
1.研究性教学目的
① 学习二阶系统阶跃响应曲线的实验测试方法;
② 研究二阶系统的两个重要参数 对阶跃瞬态响应指标的影响;
对阶跃瞬态响应指标的影响;
③ 研究线性系统的开环比例系数K对稳定性的影响;
④ 研究线性系统的时间常数T对稳定性的影响。
2.知识点训练
① 自行设计二阶及三阶系统电路。
② 选择好必要的参数值,计算出相应的阶跃响应数值,进行仿真分析。
3.研究性要求
① 自行设计二阶及三阶仿真电路,可以使用Proteus\Multisim\EWB\Matlab等仿真软件;
② 针对各环节选择好必要的参数值,理论计算环节的输出响应;
③ 仿真分析环节的在典型输入信号作用下的输出波形。
4.研究性内容
实验一:典型二阶系统方块图和实现电路如图1-1所示。
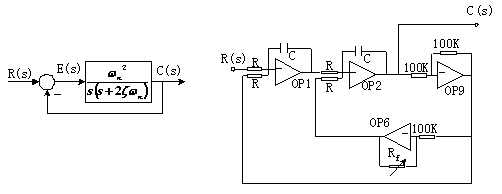
图1-1 二阶系统
闭环传递函数如下:
 ,
, (T是时间常数)。
(T是时间常数)。
各运算放大器运算功能:
OP1,积分, ;
;
OP2,积分,;
OP9,反相,(-1);
OP6,反相比例, 。
。
可以得到:

实验一步骤
①  ,使
,使 ,
, ,取
,取 ,
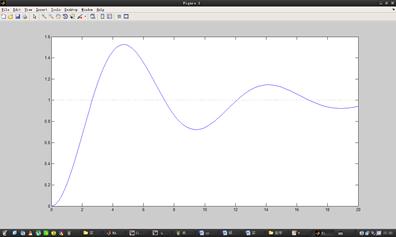
, ,使T=0.47s,
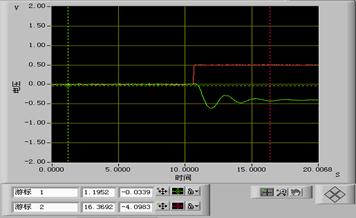
,使T=0.47s, ,加入单位阶跃扰动
,加入单位阶跃扰动 ,记录响应曲线
,记录响应曲线 ,记作[1]。
,记作[1]。
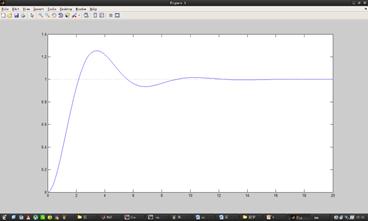
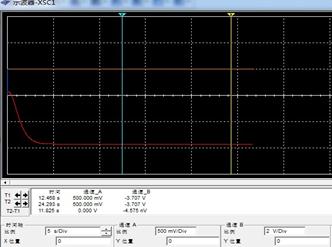
仿真结果

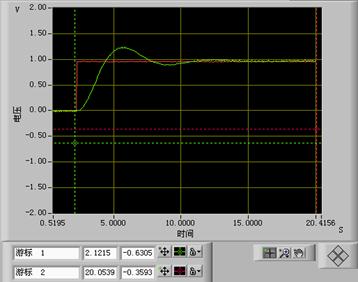
实验结果
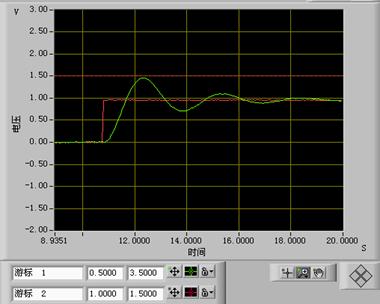
通过游标读图可以得到以下数据:
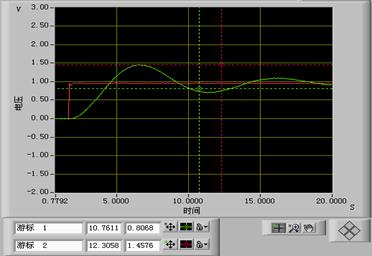
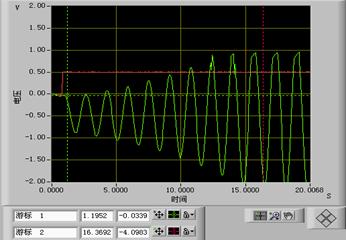
② 保持不变,单位阶跃扰动不变,取, ,使T=1.47s,
,使T=1.47s, ,记录响应曲线,记作[2]。
,记录响应曲线,记作[2]。
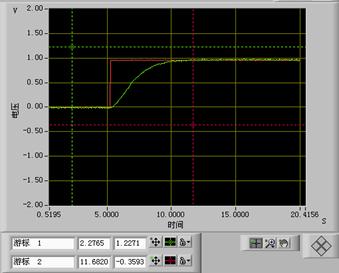
仿真结果
实验结果
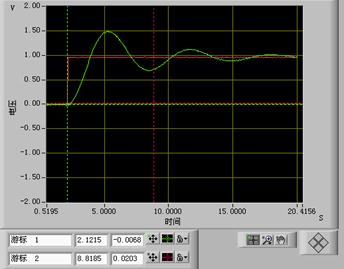
③ 保持不变,单位阶跃扰动不变,取, ,使T=1.0s,
,使T=1.0s, ,记录响应曲线,记作[3]。
,记录响应曲线,记作[3]。
仿真结果

实验结果
④ 保持不变,单位阶跃扰动不变,取 ,使k=0.8,
,使k=0.8, ,记录响应曲线,记作[4]。
,记录响应曲线,记作[4]。
仿真结果
实验结果
⑤ 保持不变,单位阶跃扰动不变,取 ,使k=2.0,
,使k=2.0, ,记录响应曲线,记作[5]。
,记录响应曲线,记作[5]。
仿真结果

实验结果
要求:将曲线[1]、[2]、[3]进行对比,[3]、[4]、[5] 进行对比,将[3]中的 和理论值进行比较。并讨论。
和理论值进行比较。并讨论。
附加实验:
实验二步骤
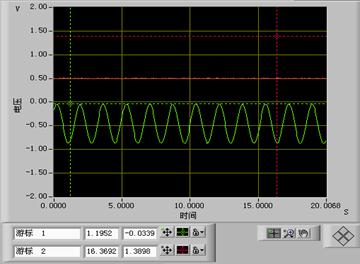
① 求取系统的临界开环比例系数KC,其中:Cf1=Cf2=Cf3=0.47u;Ri3=1M。实验求取方法:
l 加入r=0.5V的阶跃扰动;
l 使系统输出c(t)呈等幅振荡。(t=5s/cm,y=0.5V/cm);
l 断开反馈线,维持r=0.5V的扰动,测取系统输出电压Uc,则 。
。
② 系统的开环比例系数K对稳定性的影响
l 观察K增大、减小时,系统的响应曲线;
l 记录当K=0.5Kc时的系统响应曲线(t=5s/cm,y=100mV/cm);
l 记录当K=1.25Kc时的系统响应曲线(t=5s/cm,y=0.5V/cm)。
(1) 求取系统的临界开环比例系数KC
仿真结果:
R2=145k欧:
断开反馈线:
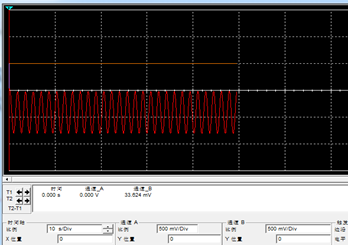
实验结果:
首先达到等幅振荡;
断开反馈线:

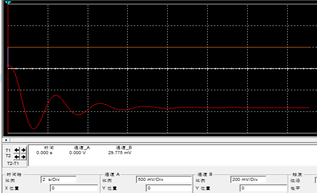
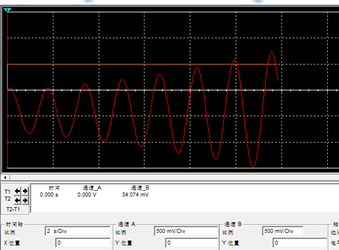
(2)系统的开环比例系数K对稳定性的影响
仿真结果:
当K=0.5Kc的时候,R2约为440k欧,对应的波形如下:
当K=1.25Kc的时候,R2约为115k欧,对应的波形如下:
实验结果:
K=0.5Kc
K=1.25Kc
第二篇:线性系统频域分析实验报告
实验三、线性系统的频域分析法
一,实验目的
1,掌握matlab绘制波特图以及奈奎斯特图的方法。
2,学会从波特图以及奈奎斯特图判定系统的稳定性。
3,学会从波特图上求系统的稳定裕度。
4,了解k值变化时对波特图幅频和相频曲线的影响。
5,掌握matalab绘制系统零极点分布图的方法。
6,学会从系统的零极点分布图判断系统的稳定性。
二,实验原理
1,从奈奎斯特图判定系统是否稳定的原理
奈式稳定判据:反馈控制系统稳定的充分必要条件是半闭合曲线ΓGH不穿过(-1,0j)点,且逆时针包围临界点(-1,0j)点的圈数R等于开环传递函数正实部极点数P
具体方法是,先观察系统传递函数得出系统是否在s平面的右半开平面由极点,得出P的值,在观察曲线从(-1,0j)点右侧穿越的次数,其中自上而下为正穿越,自下而上为负穿越,完整的一次穿越记为N半次穿越记为0.5N,R=2N=2(N+ -N-) 而Z=P-R,观察Z是否为零,Z为零则系统是稳定的,Z不为零时则系统是不稳定的。
2,从波特图判定系统是否稳定的原理。
从奈奎斯特稳定判定我们可以知道,要判定系统是否稳定就要观察曲线穿越(-1,0j)点次数,对应在波特图中,当取w=wc时,要满足A(wc)=|G(jwc)H(jwc)|=1 L(wc)=20logA(wc)=0
因此wc为分界点,对应到相频曲线上,观察在w<wc时曲线穿越-180度的次数。然后计算方法和上面相同,既可以判定系统的稳定性。 3,根据系统的零极点分布判断系统稳定性的原理
三,实验内容
A、 设单位负反馈系统的开环传递函数为K(S+1)/S(S+2)(S^2+17S+4000) 其中K=1000
(1)绘制波特图。
(2) 观察绘制出的bode 图,分析系统的稳定性,并在图上求稳定裕度;
(3) 绘制K=2000 时系统的bode 图,分析曲线的改变情况,并分析K 值变化时,对系统幅频响应和相频响应的影响。
分析:1,绘制波特图matlab 文本命令为:
s=tf(‘s’);
G=1000*(s+1)/(s*(s+2)*(s^2+17*s+4000))
Bode(G)
Grid on
Margin(G)
,2,绘制出的波形为
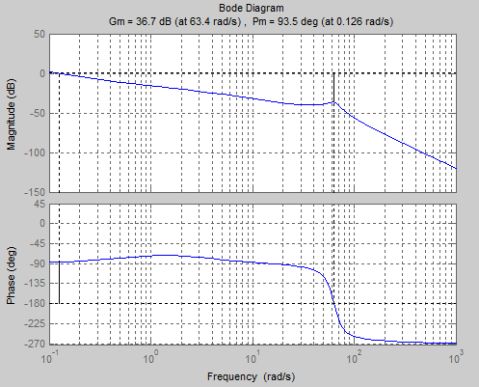
2,由于传递函数中可知v=1所以要在相频中增补从-90度到0度的相频曲线,由波特图可以看出当L(w)=0dB时对应的频率值为wc,在w<wc时,在相频曲线中没有穿越-180度,所以可以知道R=0,又由传递函数可以知道P=0,所以Z=0,从而我们知道系统此时是稳定的,由裕度函数我们可以在图中求出幅值裕度Gm=36.7dB,相角裕度Pm=93.5度.剪切频率wc=0.126rad/s.
3,改变系统的k值,令k=2000绘制此时的波特图,matlab文本命令为;s=tf(‘s’);
G=2000*(s+1)/(s*(s+2)*(s^2+17*s+4000))
Bode(G)
margin(G)
grid on
得到系统的波特图为:
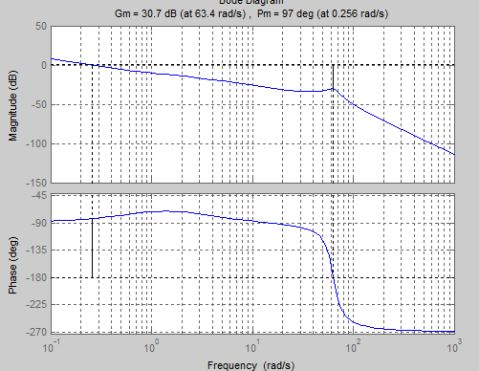
由波特图可以看出,当k值变大后,对相频曲线没有影响,因为k环节不提供相角,而对于幅频曲线来说当k值变为2000后相当于整个曲线向上平移了20lg2,从而使得幅值裕度和相角裕度改变了,幅值裕度为Gm=30.7dB,相角裕度为Pm=97度,剪切频率wc=0.256rad/s. B,设单位负反馈的开环传递函数为G(s)=10/(s+5)/(s-1)
(1) 绘制系统的Nyquist 曲线
(2) 分析系统的稳定性
(3) 根据系统的闭环零极点的分布图来分析系统的稳定性,和
(2)得到的结果比较;
1,绘制Nyquist 曲线的matlab文本命令为:
num=10;
den=conv([1 5],[1 -1]);
nyquist(num,den)
绘制出的图形为:
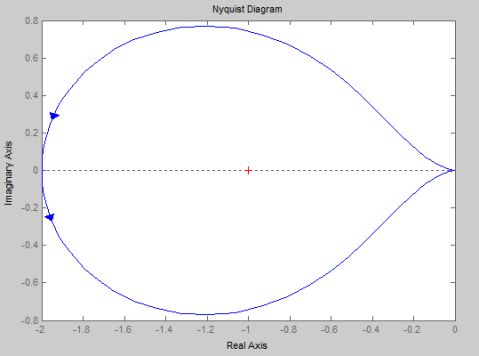
2,分析系统的稳定性,当w趋于零时G(Jw)等于-2所以曲线的起点在(-2,0j),由曲线我们可以看出,曲线在(-1,0j)左边有半次自上而下的正穿越所以N+=0.5,N=2(N+-N-)=1,所以R=1,由系统的传递函数可以知道P=1,所以Z=P-R=0,从而得出系统是稳定的。 3,绘制系统的闭环零极点的分布图的matlab文本命令为: num=10;
den=conv([1 5],[1 -1]);
G=tf(num,den)
pzmap(feedback(G,1))
可以得到系统的零极点分布图为:
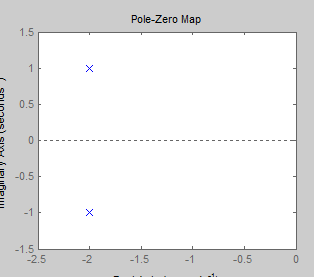
由图可知闭环传递在s平面的右开平面没有零极点分布,所以可以知道系统是稳定的。与2得到的结果是一致的。
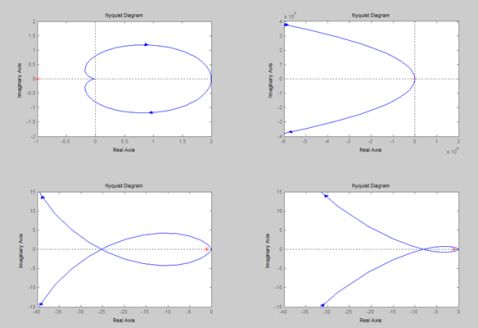
C,完成教材第五章练习5-11中各系统的Nyquist图并分析系统的稳定性和闭环系统零极点分布图。
1,G(s)=2/(2s+1)/(8s+1)
2, G(s)=200/s^2/(s+1)/(10s+1)
3, G(s)=(80s+8)/s/(s^2+s+1)/(0.5s+1)
4,G(s)=(0.025s^2+s+10)/s/(s+1)/(10s+1)
绘制奈奎斯特图的matlab文本命令为;
subplot(2,2,1);
num=[2];
den=conv([2 1],[8 1]);
nyquist(num,den);
subplot(2,2,2);
num=[200];
den=conv([1 1 0 0],[10 1]);
nyquist(num,den);
subplot(2,2,3);
num=[80 8];
den=conv([1 1 1 0],[0.5 1]);
nyquist(num,den);
subplot(2,2,4);
num=[0.025 1 10];
den=conv([1 1 0],[10 1]);
nyquist(num,den);
得到各传递函数的nyquist图为:
绘制系统的零极点分布图的matlab文本命令为: subplot(2,2,1);
num=[2];
den=conv([2 1],[8 1]); G=tf(num,den);
pzmap(feedback(G,1)); subplot(2,2,2);
num=[200];
den=conv([1 1 0 0],[10 1]); G=tf(num,den);
pzmap(feedback(G,1)); subplot(2,2,3);
num=[80 8];
den=conv([1 1 1 0],[0.5 1]); G=tf(num,den);
pzmap(feedback(G,1)); subplot(2,2,4);
num=[0.025 1 10];
den=conv([1 1 0],[10 1]); G=tf(num,den);
pzmap(feedback(G,1));
得到各系统的零极点分布图为:
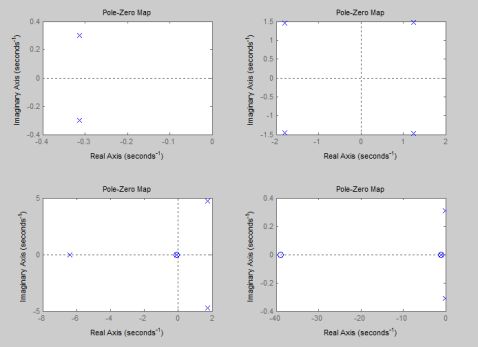
分析:1,在奈奎斯特图上可以看到曲线没有从(-1,0j)的左侧穿越,所以R=0,由系统的传递函数可以知道P=0,所以Z=0,所以系统是稳定的,从闭环函数的零极点分布图可以知道,闭环系统在s平面的右半开平面没有零极点的分布同样可以得出系统是稳定的结论。 2,系统是2型系统增补从0到-180度一段曲线,在奈奎斯特图上可以看到曲线有一次自下而上的负穿越,所以R=-2,由系统的传递函数可以知道P=0,所以Z=2,所以系统是不稳定的,从闭环函数的零极点分布图可以知道,闭环系统在s平面的右半开平面有两个极点的分布同样可以得出系统是不稳定的结论。
3,在奈奎斯特图上可以看到曲线有从(-1,0j)的一次负穿越,所以R=2N=-2,由系统的传递函数可以知道P=0,所以Z=p-R=2,所以系
统是不稳定的,从闭环函数的零极点分布图可以知道,闭环系统在s平面的右半开平面有两个闭环极点,同样可以得出系统是不稳定的结论。
4,因为系统是一型的所以要增补0°到-90°一段曲线,在奈奎斯特图上可以看到曲线有自上而下从(-1,0j)的左侧穿越,所以R=-2,由系统的传递函数可以知道P=0,所以Z=2,所以系统是不稳定的,从闭环函数的零极点分布图可以知道,闭环系统在s平面的右半开平面有两个极点,同样可以得出系统是不稳定的结论。
D, 完成教材第五章练习5-11中各系统的波特图,利用波特图分析系统的稳定性与C的结果比较。
绘制波特图的matlab文本命令为:
subplot(2,2,1);
num=[2];
den=conv([2 1],[8 1]);
bode(num,den);
grid on
subplot(2,2,2);
num=[200];
den=conv([1 1 0 0],[10 1]);
bode(num,den);
grid on
subplot(2,2,3);
num=[80 8];
den=conv([1 1 1 0],[0.5 1]); bode(num,den);
grid on
subplot(2,2,4);
num=[0.025 1 1];
den=conv([1 1 0],[10 1]); bode(num,den);
grid on
得到各系统的波特图为:
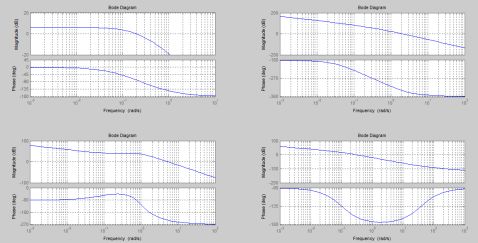
分析:1,令L(w)=0得到wc在观察当w<wc时,相频曲线中穿越-180度的次数,从1图中可以看出穿越-180度的次数为0次所以R=0,由系统的开环传递函数可以知道P=0所以Z=0,系统是稳定的,与C实验中所得结果一致。
2,令L(w)=0得到wc在观察当w<wc时,相频曲线中穿越-180度的次数从2图中再增补相频曲线从-180度到0度,所以可以知道R=2,而P=0,所以Z=-2,系统是不稳定的,与C实验中所得结果一致。
3,令L(w)=0得到wc在观察当w<wc时,相频曲线中穿越-180度的次数从2图中再增补相频曲线从-90度到0度,又一次穿越-180度所以可以知道R=2,而P=0,所以Z=-2,系统是不稳定的,与C实验中所得结果一致。
4,令L(w)=0得到wc在观察当w<wc时,相频曲线中穿越-180度的次数从2图中再增补相频曲线从-90度到0度,其中没有穿越=180度所以可以知道R=0,而P=0,所以Z=0,系统是稳定的,与C实验中所得结果一致。
四,实验结论,及心得体会。
1,在实验A中改变k的值后我们发现系统的幅频特性曲线改变,从而使得系统的稳定裕度也会改变,所以改变k值会影响系统的稳定性。 2,从系统的波特图和奈奎斯特图我们很容易就能看出系统的稳定性,这给我们提供了一个很好判定系统稳定性的方法。
3,通过这次实验,我掌握了各种图形的matlab绘制方法,加深了对
课本上各种稳定性判别方法的理解,学会了用软件作图判定系统稳定性,进一步了解了各种系统参数对系统性能的影响。
4,由实验B我们可以知道,判断系统的稳定性还可以通过观察闭环传递函数的零极点分布,若闭环传递函数在虚轴右侧没有零极点,则系统是稳定的,若在虚轴右侧有极点分布,则系统是不稳定的。当极点在虚轴时系统是临界稳定的。