循迹小车设计报告
作品名称:黑色印记循迹遥控小车
设计要求:
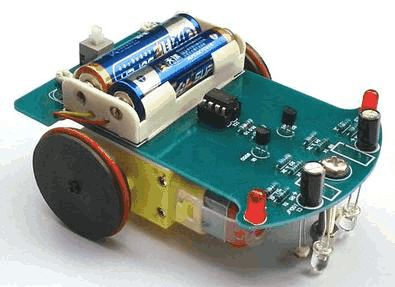
1、 设计一套循迹小车,外形如下图所示(可以从淘宝上购买散件)
2、小车可以在1.5m*1m的黑色跑道上按照黑色印记前进
3、增加遥控功能,包括前进,后退,停车
4、提高小车的运行速度
5、拍摄一段方案说明及电路仿真视频,并上传到Youku视频
6、提交一份1000字以内的设计报告,附主要的原理图和代码
实验器材:
车轮、直流电机、小车底板、单片机、黑色传感器、导线、电源功放电路板、反相器、直流电源、无线串口模块。
设计思路:本系统采用简单明了的设计方案。通过黑色传感器模块判断黑色路径,将所感知的信号传送到单片机系统,然后单片机系统根据预先编订的程序,控制直流电机,控制小车

车轮的转向,从而实现智能循迹。
实验原理及其设计
小车组装部分设计:
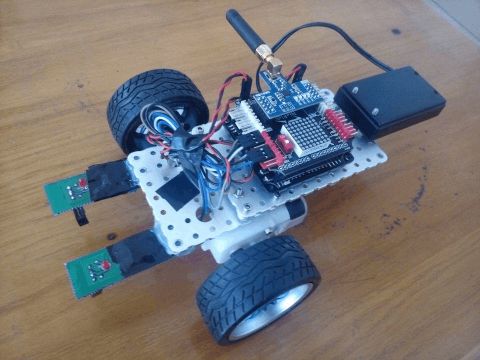
小车车轮采用两车轮为前轮,后轮为一金属万向轮,车身底板采用铝制材料底板,连接使用螺丝组装。外形如下图所示:
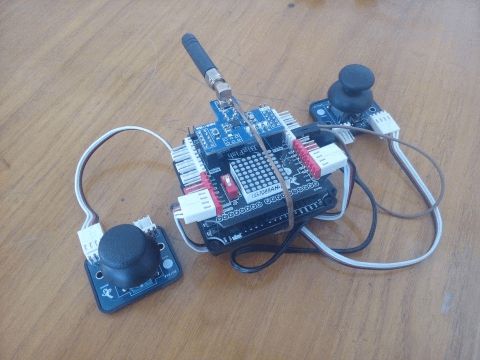
硬件电路设计:小车采用Arduino单片机作为控制芯片,如下图所示
单片机控制电路:
主要包括:时钟电路、电源电路、复位电路。其中各个部分的功能如下:
1.时钟电路:给单片机提供一个外接的16MHZ的石英晶振。
2.电源电路:给单片机提供5V电源。
3.复位电路:在电压达到正常值时给单片机一个复位信号。
将Arduino单片机进行扩展使用,外形如下图:

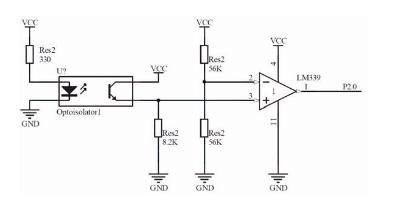
传感器电路:光电寻线方案一般由多对红外收发管组成,通过检测接受到的反射光强,判断黑白线。原理图由红外对管和电压比较器两部分组成,红外对管输出的模拟电压比较器转换成数字电平输出到单片机,原理图如下:
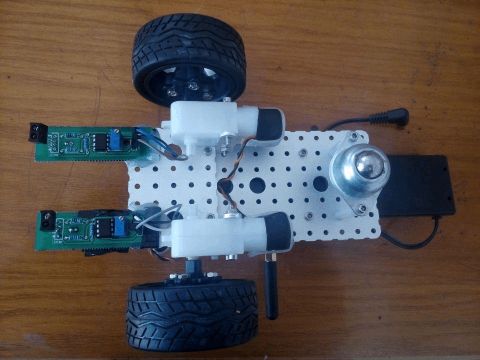
遥控部分电路设计:小车增加遥控功能实现远程控制小车的前进后退,左右转弯。采用两块无线串口模块,将其安装在Arduino控制板上,一块板子作为遥控器,另一块装在小车上,实现远程控制。外形如下:

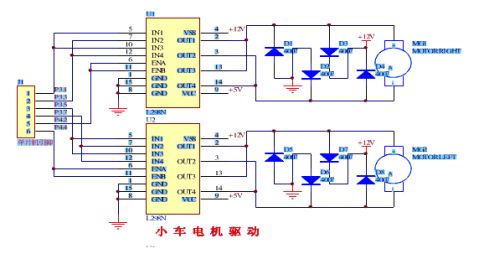
电机驱动电路:电机采用网上购买的一种二相和四相电机的专用驱动器,通过单片机控制电机的正转和反转,实现小车的方向控制。
遥控循迹小车整体外观图:

程序部分:采用Arduino的程序设计,如下:
int MotorRight1=5;
int MotorRight2=6;
int MotorLeft1=9;
int MotorLeft2=10;
const int SensorLeft=2; //左感测器输入脚
const int SensorRight=3; //右感测器输入脚 int SL; //左感测器状态
int SR; //右感测器状态
void setup()
{
Serial.begin(9600);
pinMode(MotorRight1, OUTPUT); // 脚位 14 (PWM) pinMode(MotorRight2, OUTPUT); // 脚位 15 (PWM) pinMode(MotorLeft1, OUTPUT); // 脚位 16 (PWM) pinMode(MotorLeft2, OUTPUT); // 脚位 17 (PWM) pinMode(SensorLeft, INPUT); //定义左感测器
pinMode(SensorRight, INPUT); //定义右感测器 }
void loop()
{
SL = digitalRead(SensorLeft);
// SM = digitalRead(SensorMiddle);
SR = digitalRead(SensorRight);
if (SL == LOW&&SR==LOW)//
{
digitalWrite(MotorRight1,HIGH);
digitalWrite(MotorRight2,LOW);
analogWrite(MotorRight1,30);
analogWrite(MotorRight2,0);
digitalWrite(MotorLeft1,HIGH);
digitalWrite(MotorLeft2,LOW);
analogWrite(MotorLeft1,10);
analogWrite(MotorLeft2,10);
}
else //
{
if (SL == HIGH & SR == LOW)// 左黑右白, 快速左转 {
delay(1);
digitalWrite(MotorRight1,HIGH);
digitalWrite(MotorRight2,LOW);
analogWrite(MotorRight1,10);
analogWrite(MotorRight2,10);
digitalWrite(MotorLeft1,LOW);
digitalWrite(MotorLeft2,LOW);
}
else if (SR == HIGH & SL == LOW) // 左白右黑, 快速右转 {
delay(1);
digitalWrite(MotorRight1,LOW);
digitalWrite(MotorRight2,LOW);
digitalWrite(MotorLeft1,HIGH);
digitalWrite(MotorLeft2,LOW);
analogWrite(MotorLeft1,10);
analogWrite(MotorLeft2,10);
}
else // 都是白色, 停止
{
digitalWrite(MotorRight1,LOW);
digitalWrite(MotorRight2,LOW);
digitalWrite(MotorLeft1,LOW);
digitalWrite(MotorLeft2,LOW);;
}}}
第二篇:循迹移动小车设计报告-沈国权 王燕伟 刘丽丽
目 录
目 录 ............................................................................................................................... 0
摘 要: ...................................................................................................................... 1
1.任务及要求................................................................................................................... 2
1.1任务 .......................................................................................................................... 2
2.系统设计方案 ............................................................................................................... 2
2.1小车循迹原理 ............................................................................................................ 2
2.2控制系统总体设计 ..................................................................................................... 2
3.硬件设计 ...................................................................................................................... 3
3.1 循迹传感器模块 ........................................................................................................ 3
3.1.2具体电路 ................................................................................................................ 4
3.1.3传感器安装 ............................................................................................................ 4
3.2控制器模块 ................................................................................................................ 4
3.3电机及驱动模块 ......................................................................................................... 5
3.4循迹移动小车总体设计 .............................................................................................. 7
3.4.1系统原理图 ............................................................................................................ 7
3.4.2系统总体说明 ......................................................................................................... 8
4.软件设计 ...................................................................................................................... 8
4.1 PWM控制 ................................................................................................................... 8
4.2 总体软件流程图 ........................................................................................................ 8
4.3小车循迹流程图 ......................................................................................................... 9
5.总结 ............................................................................................................................11
自动循迹小车
循迹移动小车
摘 要:
本设计是一种基于单片机控制的简易自动寻迹小车系统,包括小车系统构成软硬件设计方法。小车以STC89C52 为控制核心, 用单片机产生PWM波,控制小车速度。利用红外光电传感器对路面黑色轨迹进行检测,并将路面检测信号反馈给单片机。单片机对采集到的信号予以分析判断,对位置偏差采用PID控制,及时控制驱动电机以调整小车转向,从而使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹的目的。
关键词:单片机STC89C52 PID 光电传感器 直流电机 自动循迹小车
Abstract :
This design is a Simple Design of a smart auto-tracking vehicle which based on MSC control. The construction of the car ,and methods of hardware and software design are included. The car use STC89C52 as heart of centrol in this system. Then using PWM waves Produced by MCU to control car speed. By using infraraed sensor to detect the information of black track. The smart vehicle acquires the information and sends t hem to the MSC. Then the MSC analyzes the signals and controls the movements of t he motors by PID. Which make the smart vehicle move along the given black line antomaticly.
Keywords : infrared sensor ;PID;MSC ;auto-tracking
1
自动循迹小车
1.任务及要求
1.1任务
1.设计一个基于直流电机的自动寻迹小车,使小车能够自动检测地面黑色轨迹,并沿着黑色车轨迹行驶。
2.研究寻迹算法,优化小车的寻迹路线,使路线更平滑,并且减少过弯时的时间。
2.系统设计方案
2.1小车循迹原理
这里的循迹是指小车在白色地板上循黑线行走,由于黑线和白色地板对光线的反射系数不同,可以根据接收到的反射光的强弱来判断“道路”。通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
另外我们还给小车附加了红外遥控与简单的避障功能。
2.2控制系统总体设计
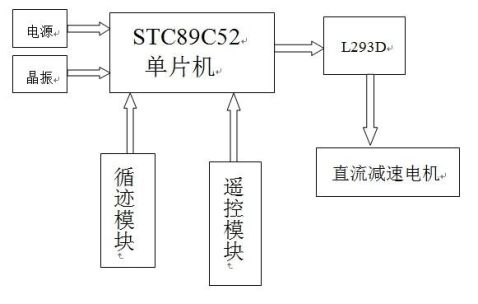
自动循迹小车控制系统由主控制电路模块、红外检测模块、遥控及壁障模块、电机及驱动模块等部分组成,控制系统的结构框图如图2-1 所示。
2
自动循迹小车
图2-1 控制系统结构图
1、 主控制电路模块:用STC89C52单片机、复位电路,时钟电路
2、 红外检测模块:红外对管,7404反相器
3、 电机及驱动模块:电机驱动芯片L293D、四个直流电机分为两组
4、 电源模块:四节蓄电池
以下使本系统的方框图:
3.硬件设计
3.1 循迹传感器模块
我们用一个红外发射管和一个光敏三级管自己制作红外检测传感器。
发射管输出的红外信号经反射被接收管接收的强弱与接收管的输出电压成正比,再利用7404反相器的门槛电压将输出电压分成高电平与低电平两类,以此通过判断地面的反射性能来判断反射面是否为黑色。
3
自动循迹小车
3.1.2具体电路
通过红外传感器检测黑线,输出接收到的信号给7404 ,接收电压经过反相器后,输出信号变为高低电平,再输入到单片机中,用以判定是否检测到黑线。
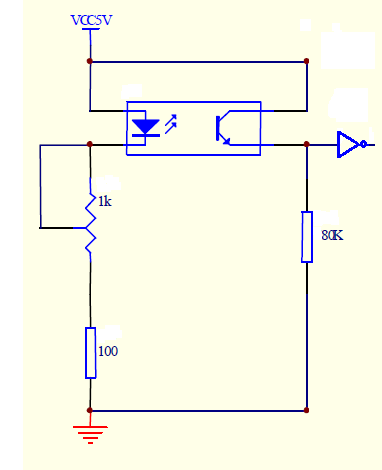
图3-1 传感器模块电路图
3.1.3传感器安装
在小车具体的循迹行走过程中,为了能精确测定黑线位置并确定小车行走的方向,我们在底盘装设9个红外探测头,进行方向纠正控制,提高其循迹的可靠性。
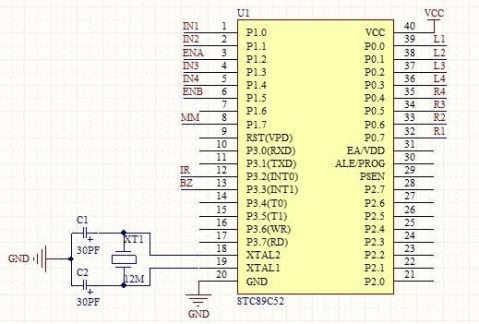
3.2控制器模块
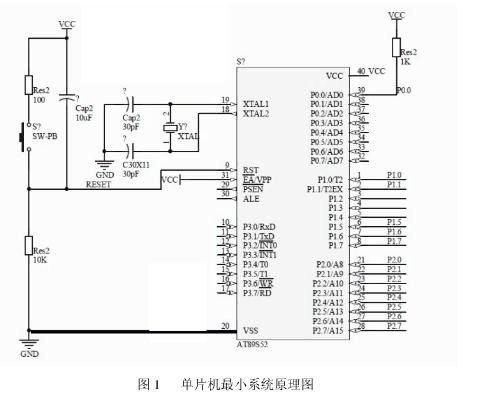
采用STC 公司的STC89C52单片机作为主控制器,单片机最小系统如图3-3
1)采用外部时钟,晶振频率为12MHZ
4
自动循迹小车
图3-3 单片机最小系统
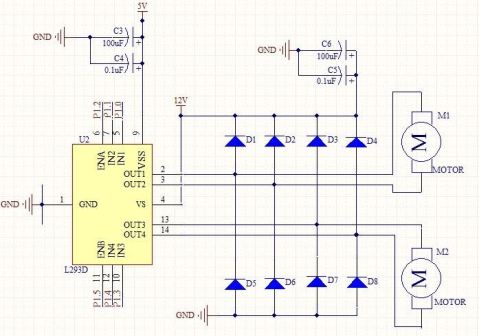
3.3电机及驱动模块
驱动模块采用专用芯片L293D 作为电机驱动芯片,L293D 是一个具有高电压大电流的全桥驱动芯片,其响应频率高,一片L293D可以分别控制两个直流电机。以下为L293D的引脚图和输入输出关系表。
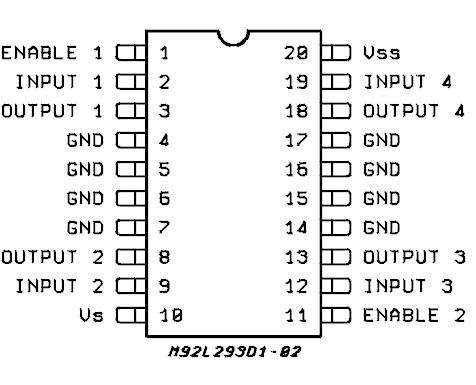
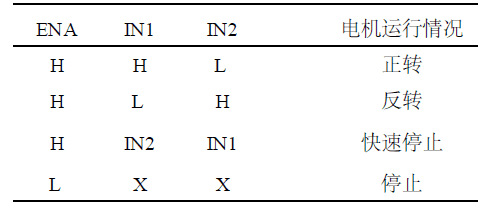
图3-9 L293D外部引脚 表2 L293D输入输出关系
驱动电路的设计如图3-10 所示:
5
自动循迹小车
图3-10 L293D电机驱动电路
L293D 的5、7、10、12 四个引脚接到单片机上,通过对单片机的编程就可实现两组直流电机的PWM调速控制。
6
自动循迹小车
3.4循迹移动小车总体设计
3.4.1系统原理图
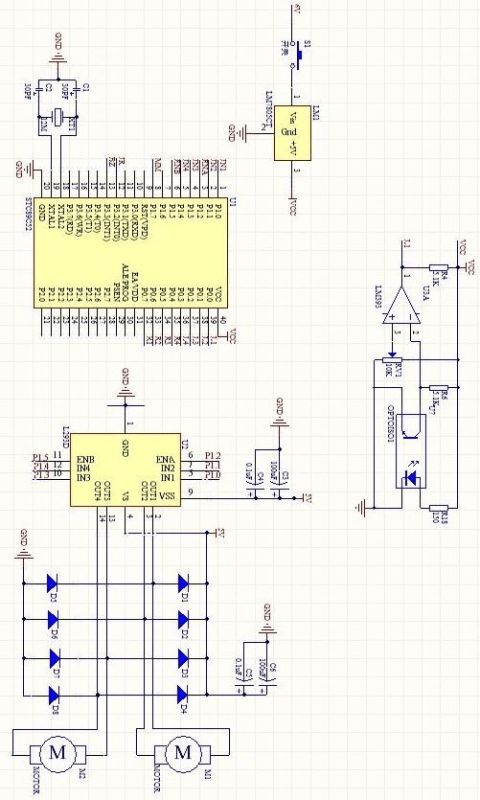
7
自动循迹小车
3.4.2系统总体说明
如图3-11所示,当光电传感器开始接受信号,通过比较器将信号传如单片机中。小车进入寻迹模式,即开始不停地扫描与探测器连接的单片I/O 口,一旦检测到某个I/O 口有信号变化,就执行相应的判断程序,把相应的信号发送给电动机从而纠正小车的状态。单片机通过延时程序来模拟产生PWM波,控制电机转速。
4.软件设计
4.1 PWM控制
本系统采用PWM来调节直流电机的速度。PWM是通过控制固定电压的直流电源开关频率,从而改变负载两端的电压,进而达到控制要求的一种电压调整方法。
在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短。通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。因此,PWM又被称为“开关驱动装置”。
在脉冲作用下,当电机通电时,速度增加;电机断电时,速度逐渐减少。只要按一定规律,改变通、断电的时间,即可让电机转速得到控制。
本系统中通过控制51单片机的定时器T0的初值,从而可以实现P0.4和P0.5输出口输出不同占空比的脉冲波形。将直流电机的速度分为240个等级,。速度等级对应一个周期的高电平脉冲的个数。占空比为高电平脉冲个数占一个周期总脉冲个数的百分数。一个周期加在电机两端的电压为脉冲高电压乘以占空比。占空比越大, 加在电机两端的电压越大, 电机转动越快。电机的平均速度等于在一定的占空比下电机的最大速度乘以占空比。当我们改变占空比时, 就可以得到不同的电机平均速度, 从而达到调速的目的。精确地讲, 平均速度与占空比并不是严格的线性关系, 在一般的应用中, 可以将其近似地看成线性关系。
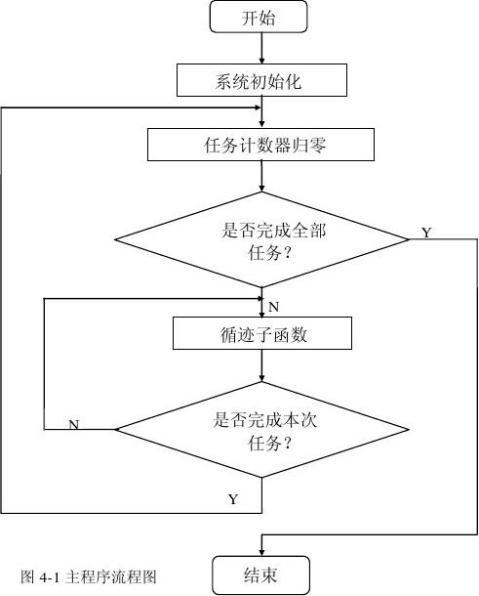
4.2 总体软件流程图
小车进入寻迹模式后,即开始不停地扫描与探测器连接的单片I/O 口,一旦检测到某个I/O 口有信号变化,就执行相应的判断程序,把相应的信号发送
8
自动循迹小车
给电动机从而纠正小车的状态。软件的主程序流程图如图4-1所示:
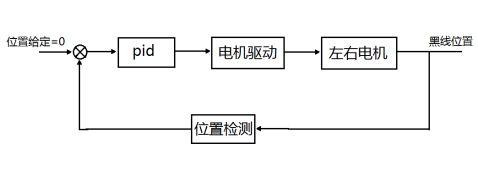
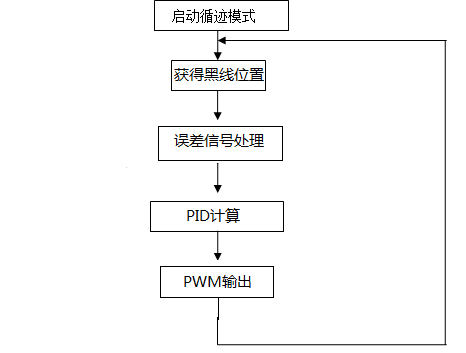
4.3小车循迹流程图
小车进入循迹模式后,即开始不停地扫描与探测器连接的单片机I/O口,一旦检测到某个I/O口有信号,即进入判断处理程序,先确定9个探测器中的哪一个探测到了黑线,再根据从左到右-4、-3、-2、-1、0、1、2、3、4标定传感器位置用来计算位置偏差。算得的位置偏差在经过PID计算子程序处理后得出PWM输出参数,再将此PWM输出参数经过PWM输出子程序向执行机构即电机驱动输出,然后继续探测黑线重复上述动作。循迹流程图如图4-2所示
9
自动循迹小车
10
自动循迹小车
5.总结
设计的寻迹小车顺利的完成了寻迹任务,并且优化了小车寻迹的路径,小车能根据弯道弯曲的不同程度及其变化动态的改变左右电机的速度差,实现小车的平滑、快速的寻迹过程。在本次设计中得出的经验有:
1、 微分能使小车转弯更加平滑、提高系统的快速性。
2、 传统的PID中的积分环节会引起系统的振荡甚至积分饱和,采用变
速积分的PID能改变这种状况。
11