实验一 运用MTALB进行时/频域分析
实验目的
1. 了解学会MATLAB的基本操作
2. 运用MATLAB进行系统建模及时域分析
实验内容
1. 掌握MATLAB的启动/关闭、数据输入、图形输出
2. 对如下系统进行建模(传递函数、极点增益、态空间方程)
3. 进行系统的时域,频域分析


1、求系统开环和闭环的单位阶跃响应(亦可是其它单位响应)
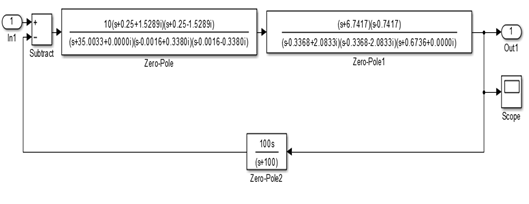
2、用零极点模型画出系统的Simulink模型
3、对系统进行频域分析及求出幅值和相值裕度,并画出波特图
1.系统开环单位阶跃响应:
代码:
阶跃响应图:
系统闭环单位阶跃响应:
代码:
阶跃响应图:
2.零极点Simulink模型:
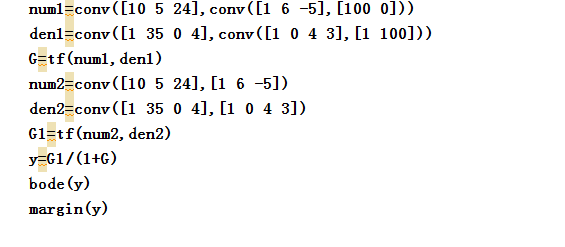
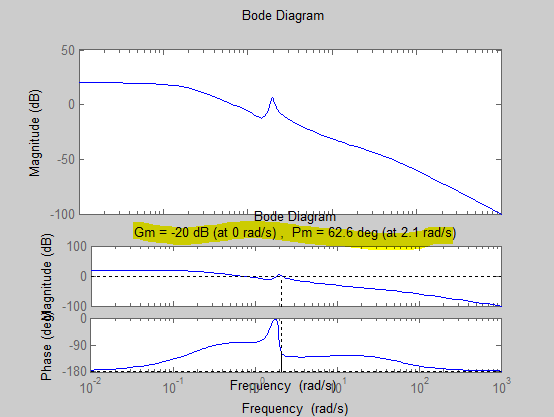
3.频域分析及Bode图:
代码:
Bode图及Gm、Pm:
实验二 基于SimEvents离散事件系统仿真
实验目的
1. 掌握离散时间系统仿真的原理及实现
2. 学会基于SimEvents仿真模型设计
实验内容
对理发店顾客问题进行仿真
问题:
假设某理发店顾客到达的间隔满足 (0,20)分钟区间内的均匀
分布,并假设理发师15分钟能完成一次理发工作,则可以用仿真方法观察理发店有几个理发师工作比较合适。
1. 建立基于SimEvents的排队模型,仿真结果及结论是?提示:实
体发生器模块、先进先出队列模块
2. 理发时间如果不是固定的15分钟,而是(12,18)分钟区间的均匀分布,建立新仿真模型,可以服务人次为多少?
1. 如图所示,当输入为480时,display显示为30.
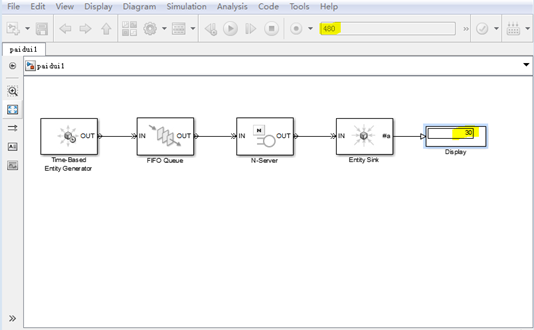
仿真结论:
1.单个理发师8小时(480分钟)内可以为30个顾客理发。
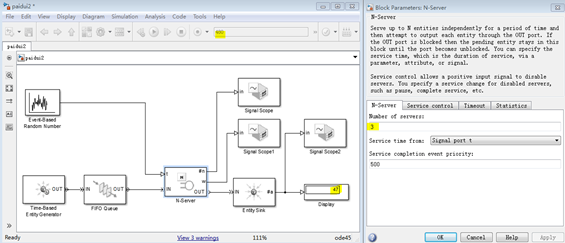
2. 如图Simevents及其仿真输出(理发师为2):
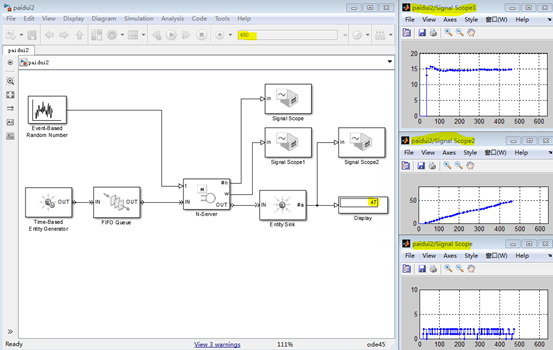
仿真结论:
顾客平均等待时间为3.35分钟。
当理发师大于2(如3.4等等)display结果仍为47。
当理发师数量提高,顾客等待时间减少,但总共服务顾客数量仍为47,不发生变化。如下:
第二篇:仿真实验报告
测量刚体的转动惯量仿真实验报告
少年班93 孙飞扬 2009035074
实验目的:
1.用实验方法验证刚体转动定律,并求其转动惯量;
2.观察刚体的转动惯量与质量分布的关系
3.学习作图的曲线改直法,并由作图法处理实验数据。
实验原理:
1.刚体的转动定律
具有确定转轴的刚体,在外力矩的作用下,将获得角加速度β,其值与外力矩成正比,与刚体的转动惯量成反比,即有刚体的转动定律:
M = Iβ (1)
利用转动定律,通过实验的方法,可求得难以用计算方法得到的转动惯量。
2.应用转动定律求转动惯量
待测刚体由塔轮,伸杆及杆上的配重物组成。刚体将在砝码的拖动下绕竖直轴转动。
设细线不可伸长,砝码受到重力和细线的张力作用,从静止开始以加速度a下落,其运动方程为mg – t=ma,在t时间内下落的高度为h=at2/2。刚体受到张力的力矩为Tr和轴摩擦力力矩Mf。由转动定律可得到刚体的转动运动方程:Tr - Mf = Iβ。绳与塔轮间无相对滑动时有a = rβ,上述四个方程得到:
m(g - a)r - Mf = 2hI/rt2 (2)
Mf与张力矩相比可以忽略,砝码质量m比刚体的质量小的多时有a<<g,
所以可得到近似表达式:
mgr = 2hI/ rt2 (3)
式中r、h、t可直接测量到,m是试验中任意选定的。因此可根据(3)用实验的方法求得转动惯量I。
3.验证转动定律,求转动惯量
从(3)出发,考虑用以下两种方法:
A.作m – 1/t2图法:伸杆上配重物位置不变,即选定一个刚体,取固定力臂r和砝码下落高度h,(3)式变为:
M = K1/ t2 (4)
式中K1 = 2hI/ gr2为常量。上式表明:所用砝码的质量与下落时间t的平方成反比。实验中选用一系列的砝码质量,可测得一组m与1/t2的数据,将其在直角坐标系上作图,应是直线。即若所作的图是直线,便验证了转动定律。
从m – 1/t2图中测得斜率K1,并用已知的h、r、g值,由K1 = 2hI/ gr2求得刚体的I。
B.作r – 1/t图法:配重物的位置不变,即选定一个刚体,取砝码m和下落高度h为固定值。将式(3)写为:
r = K2/ t (5)
式中K2 = (2hI/ mg)1/2是常量。上式表明r与1/t成正比关系。实验中换用不同的塔轮半径r,测得同一质量的砝码下落时间t,用所得一组数据作r-1/t图,应是直线。即若所作图是直线,便验证了转动定律。
从r-1/t图上测得斜率,并用已知的m、h、g值,由K2 = (2hI/ mg)1/2求出刚体的I。
实验仪器:
刚体转动仪,滑轮,秒表,砝码
实验内容:
1.调节实验装置:调节转轴垂直于水平面
调节滑轮高度,使拉线与塔轮轴垂直,并与滑轮面共面。选定砝码下落起点到地面的高度h,并保持不变。
2.观察刚体质量分布对转动惯量的影响
取塔轮半径为3.00cm,砝码质量为20g,保持高度h不变,将配重物逐次取三种不同的位置,分别测量砝码下落的时间,分析下落时间与转动惯量的关系。本项实验只作定性说明,不作数据计算。
3.测量质量与下落时间关系:
测量的基本内容是:更换不同质量的砝码,测量其下落时间t。
用游标卡尺测量塔轮半径,用钢尺测量高度,砝码质量按已给定数为每个5.0g;用秒表记录下落时间。
将两个配重物放在横杆上固定位置,选用塔轮半径为某一固定值。将拉线平行缠绕在轮上。逐次选用不同质量的砝码,用秒表分别测量砝码从静止状态开始下落到达地面的时间。对每种质量的砝码,测量三次下落时间,取平均值。砝码质量从5g开始,每次增加5g,直到35g止。
用所测数据作图,从图中求出直线的斜率,从而计算转动惯量。
4.测量半径与下落时间关系
测量的基本内容是:对同一质量的砝码,更换不同的塔轮半径,测量不同的下落时间。
将两个配重物选在横杆上固定位置,用固定质量砝码施力,逐次选用不同的塔轮半径,测砝码落地所用时间。对每一塔轮半径,测三次砝码落地之间,取其平均值。注意,在更换半径是要相应的调节滑轮高度,并使绕过滑轮的拉线与塔轮平面共面。由测得的数据作图,从图上求出斜率,并计算转动惯量。
实验数据记录及计算:
1.m – 1/t2关系:
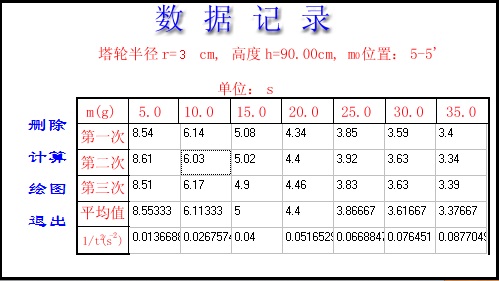
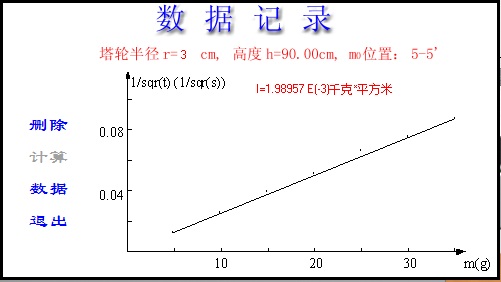
由实验作图得斜率并计算得:I=1.99E(-3)kg*平方米
2. r – 1/t关系:
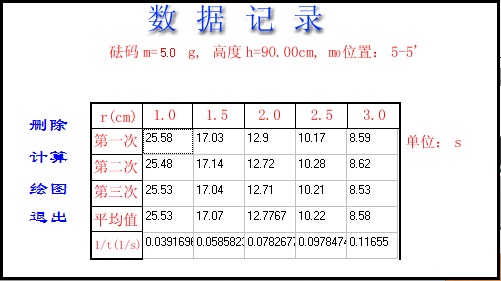
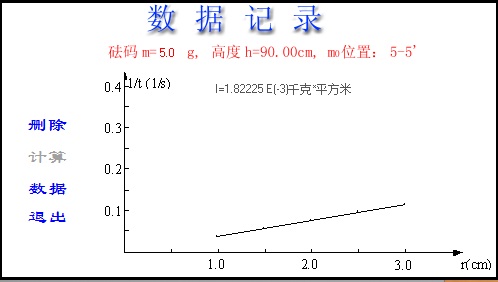
由上数据计算得:I=1.82E(-3)kg*平方米
实验小结:
用作m – 1/t2图法得I=1.99E(-3)kg*平方米
用作r – 1/t图法得I=1.82E(-3)kg*平方米
两种方法所得结果之间误差较大,
原因分析:。
思考题
(1)由实验数据所作的m-(1/t)2图中,如何解释在m轴上存在截距?
答:随着m越来越小,t也越来越小, 逐渐趋于0.
逐渐趋于0.
(2)定性分析实验中的随机误差和可能的系统误差。
答:1.实验装置未调节好,转轴不是铅直。没有使轴尖与轴槽尽量为点接触,轴转动不自如,且有摇摆,增大了摩擦力矩。
2.拉线要缠绕不平行或有重叠,各匝线之间挤压而增大阻力。
3.计时与启动不一致,计时出现误差。
4.砝码质量太大,使下落的加速度a太大,不能保证a<<g。
5.计算机模拟不是万能的,难免有误差