电子信息工程系实验报告
 课程名称:传感与检测
课程名称:传感与检测
 实验项目名称:实验7 霍尔式传感器的特性-直流激励 实验时间:20##-6-11
实验项目名称:实验7 霍尔式传感器的特性-直流激励 实验时间:20##-6-11
班级:电信092 姓名:XXX 学号:910706201
实验目的:
了解霍尔式传感器的原理与特性。
实验环境:
霍尔片、磁路系统、电桥、差动放大器、F/V表、直流稳压电源、测微头、振动平台、主、副电源。
实验原理:
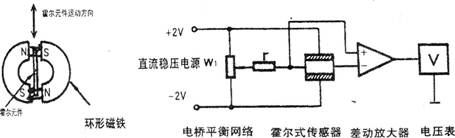
霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。当霍尔元件通过恒定电流时,霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
有关旋钮初始位置:
差动放大器增益旋钮打到最小,电压表置20V档,直流稳压电源置2V档,主、副电源关闭。
实验步骤及结果:
(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号。霍尔片安装在实验仪的振动圆盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔传感器。
(2)开启主、副电源将差动放大器调零后,增益最小,关闭主电源,根据图接线,W1、r为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
(5)上下旋动测微头,记下电压表的读数,建议每0.2mm读一个数,将读数填入下表:

使用Matlab软件,根据表格中V与X间的关系,作出V—X曲线指出线性范围,求出灵敏度,关闭主、副电源。
由表格可粗略计算得X与V间的关系为:y=0.8005x-1.5915;
由灵敏度的定义为测量元件的输出V相对于输入x的变化率,即:S=△V/△X;由绘制的曲线可知S=0.8005,近似为一个常数。
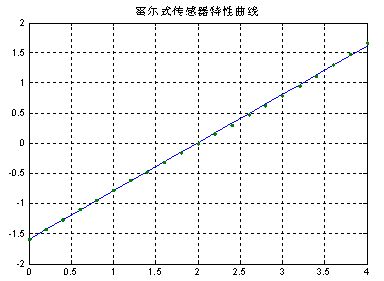
由图可知,本实验测出的实际上是磁场情况,磁场分布为梯度磁场与磁场分布有很大差异,位移测量的线性度,灵敏度与磁场分布有很大关系。
(6)实验完结关闭主、副电源,各旋钮置初始位置。
实验心得:
通过该实验,进一步了解了霍尔式传感器的原理与特性。明白了仪器一旦调整好后,测量过程中不能移动磁路系统。同时,激励电压不能过2V,以免损坏霍尔片。
第二篇:实验九 霍尔式传感器-直流激励特性
??实验九霍尔式传感器-直流激励特性
一、实验原理
霍尔元件是根据霍尔效应原理制成的磁电转换元件,当霍尔元件位于由两个环形磁钢组成的梯度磁场中时就成了霍尔位移传感器。
霍尔元件通以恒定电流时,就有霍尔电势输出,霍尔电势的大小正比于磁场强度?(磁场位置),当所处的磁场方向改变时,霍尔电势的方向也随之改变。
 二、实验所需部件
二、实验所需部件
霍尔传感器、直流稳压电源(2V)、霍尔传感器实验模块、电压表、测微仪
实验步骤:
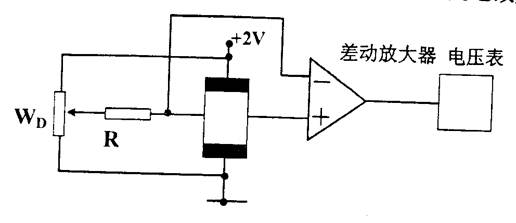
1、安装好模块上的梯度磁场及霍尔传感器,连接主机与实验模块电源及传感器 接口,确认霍尔元件直流激励电压为2V,霍尔元件另一激励端接地,实验接线按图所示,差动放大器增益10倍左右。
2、用螺旋测微仪调节精密位移装置使霍尔元件置于梯度磁场中间,并调节电桥 直流电位器WD,使输出为零。
3、从中点开始,调节螺旋测微仪,前后移动霍尔元件各1.4mm,每变化0.2mm 读取相应的电压值,并记入下表:

?
作出v-x曲线,求得灵敏度和线性工作范围。如出现非线性情况,请查找原因。
三、注意事项
1、直流激励电压只能是2V,不能接±2V(绝对值4V)否则锑化铟霍尔元件会烧坏。
2、注意,使用时要尽可能让霍尔元件与磁场垂直,以减小实验误差。
四、思考题
本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?