实验一:激光扫描
一、实验目的:
了解激光扫描技术的发展,掌握扫描机的工作原理及其应用领域。
二、实验地点及日期:
十四周周三于六教101
三、激光扫描技术简介:
三维激光扫描技术是国际上近期发展的一项高新技术。随着三维激光扫描仪在工程领域的广泛应用,这种技术已经引起了广大科研人员的关注。通过激光测距原理(包括脉冲激光和相位激光),瞬时测得空间三维坐标值的测量仪器,利用三维激光扫描技术获取的空间点云数据,可快速建立结构复杂、不规则的场景的三维可视化模型,既省时又省力,这种能力是现行的三维建模软件所不可比拟的。
四、扫描机描述:
名称:三维激光扫描机产品
型号:600Ⅱ型复合式
行程范围:X轴------500mm Y轴------600 mm Z轴------400 mm T轴------360o
传动方式:高精密滚珠导轨+高精密滚珠丝杠+(日本)三洋步进 电机
控制方式:高速PCI四轴运动控制卡
图像采集系统:(比利时)Euresys高速图像采集卡+(日本)精 工镜头+低照度高分辨率CCD
激光系统:650 nm波长激光,最大功率20 mW,连续可调
机械精度:X、Y、Z三轴综合精度分别≤0.05 mm机台重复定位精 度≤0.005 mm
机台:高精度花岗岩平台,机台承重>1000 kg,转台承重>500 kg
电源:AC 220±5V,50 Hz
使用环境:温度≤85℃,湿度≤95%
整机尺寸:1 m X 1.2 m X 2 m
五、实验原理
在本实验中,采用基于三角测量原理的三维激光扫描法来进行三维扫描。使用激光作为主动光源投射到被测物体表面,并且采用摄像机在另一位置探测被测物体表面上激光光点的位置。在该扫描系统中,摄像机、激光器和光点形成一个三角形。其中,摄像机和激光器的相对位置是已知的,激光的发射角度也是已知的。摄像机的角度可以通过探测视场中激光光点的位置来确定。这三种数据可以完全确定一个三角形的形状和大小,从而可以根据这个三角形来确定激光光点的三维位置。
通过将被测物体进行旋转,可以得到表面上每一点的三维位置。其中,旋转的角度可以通过光电编码器或者通过设定标志点用视觉的方法来得到。通过采用线状激光光源代替点状的激光光源,可以加速扫描的过程。
扫描结果如图:
六、三维建模步骤:
三维激光扫描系统采集的数据为点云数据,点云数据处理一般包含下面几个步骤:噪声去除、多视对齐、数据精简、曲面重构。噪声去除指除去点云数据中扫描对象之外的数据。在扫描过程中,由于某些环境因素的影响,也会被扫描仪采集。这些数据在后处理就要删除。多视对齐其指由于被测件过大或形状复杂,扫描时往往不能一次测出所有数据,而需要从不同位置、多视角进行多次扫描,这些点云就需要对齐、拼接称为多视对齐。点云对齐、拼接可以通过在物体表面布设同名控制点来实现。为需对齐的点云,上式是一个高度非线性问题。点云对齐的研究主要集中于寻求该问题的快速有效的求解方法。 点云的数据精简指的是由于点云数据是海量数据,在不影响曲面重构和保持一定精度的情况下需要对数据进行精简。
七、三维激光扫描技术应用领域:
最近几年,三维激光扫描技术不断发展并日渐成熟,三维扫描设也逐渐商业化,三维激光扫描仪的巨大优势就在于可以快速描被测物体,不需反射棱镜即可直接获得高精度的扫描点云数据。这样一来可以高效地对真实世界进行三维建模和虚拟重现。
实验二:机器人焊接
一、实验目的
1、了解焊接机器人的基本结构
2、了解焊接机器人的工作原理
3、对机器人领域有新的认识
二、实验地点及时间
时间:第十五周周三 地点:东区六教104
三、实验原理
焊接机器人是一种高度自动化的焊接设备,采用机器人代替手工焊接作业是焊接制造业的发展趋势,是提高焊接质量、降低成本、改善工作环境的重要手段。机器人焊接作为现代制造技术发展的重要标志己被国内许多工厂所接受,并且越来越多的企业首选焊接机器人作为技术改造的方案。
采用机器人进行焊接,光有一台机器人是不够的,还必须配备外围设备。常规的弧焊机器人系统由以5部分组成。
1、机器人本体,一般是伺服电机驱动的 6 轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。
2、机器人控制柜,它是机器人系统的神经中枢,包括计算机硬件、软件和一些专用电路,负责处理机器人工作过程中的全部信息和控制其全部动作。
3、焊接电源系统,包括焊接电源、专用焊枪等。
4、焊接传感器及系统安全保护设施。
5、焊接工装夹具。
四、使用仪器、材料
焊接机器人 一台
控制柜 一台
五、实验步骤
1、打开电源。因为是高压电,所以要注意安全
2、打开控制柜
3、打开焊剂
4、二氧化碳气体保护系统
5、在焊接机器人的控制面板里输入一下程序
0000 NOP
0001 MOVJ VJ=20.00
0002 MOVL V=300
0003 ARCON AC=160 AV=20.0 T=0.30 RETRY REPLAY
0004 MOVL V=50
0005 ARCPF
0006 MOVL V=500
0007 END
5、带上保护眼睛的用具,开始进行焊接操作
6、焊接结束,依次关掉二氧化碳保护系统、焊机、控制柜、电源
六、实验过程记录
通过观察可以看出该焊接机器人有6个自由度,其焊接端口可以进行X、Y、Z方向的移动。该焊接操作是通过程序控制的,当依次打开电源、控制柜、焊机、二氧化碳保护系统后,只要输入控制程序,启动后就可以进行较最确的焊接,焊枪要与所焊物品呈45度角,同时焊丝与所焊物品的距离保持0.5-1mm,这样才能焊出合格的焊条。焊接时有大量的火花飞溅,要注意安全。焊接完毕,依次关掉气体保护系统、焊机、控制柜、电源,焊接完毕不能用手去触摸焊缝,以免烫伤。
该实验通过二氧化碳对焊接物进行保护,避免焊接物被氧化,让焊接的金属接口有很强的硬度,不宜损坏。
六、实验结果分析
焊接完毕观察焊缝,发现焊缝不够均匀,原因有以下几点:
1、焊枪与焊接物的角度不是45度
2、因为焊丝的材料不同,所需要的电压和电流不一样。这点实验时没有很好的控制
3、焊丝离所焊物的距离没有控制在0.5-1mm之间。
4、因为二氧化碳的长时间使用,其量不多,气体气压低,导致保护效果不好
5、焊嘴的内半径与焊丝的半径没有完美的重合,焊接是有摇晃的可能
以上等多个原因导致实验的结构不好,在实验中要尽可能的避免
七、实验思考及建议
通过这次的实验,了解到实验的条件是保证实验成功的必要条件,只有在适合实验的条件下才能做成功实验。同时通过机器人的运用大大提高了生产的效率,是人类的发展不得不努力进行专研的一大板块,特别是对我们工业工程的学生有了很大的启示,光靠人力的效率提高是不够的,还要通过机械的运用来提高效率,提高生产率,让我们中国从世界制造大国转型为世界制造强国,不再以低价的劳动力来取得市场,而是质量和效率。
实验三:MOLDFLOW模流分析
一、实验目的
1、学习Moldflow软件进行分析操作的基本流程,了解软件的用户界面,各个菜单的功能、操作等。
2、掌握模型网络的划分和网格缺陷处理的基本方法,学会运用网格工具盒网络诊断工具。
3、掌握模型浇注系统的设置,能够完成模型流动、冷却和翘曲的分析。
二、实验地点及时间
时间:第十六周周三 地点:东区八教五楼
三、实验软件:Mlodflow6.1版本
四、实验步骤:
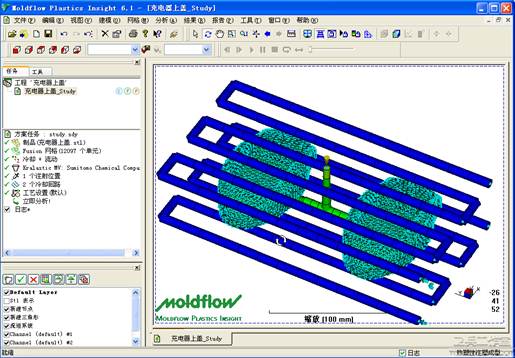
1、导入CAD模型 启动UG NX 6.0,将要导入的CAD模型另存为123.stp文件;打开Moldflow Plastic Insight 6.0并将该模型stp文件导入
2、网格划分【网格】|【生成网格】|【立即划分】,划分完成后确定
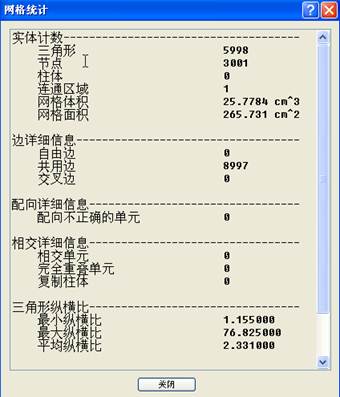
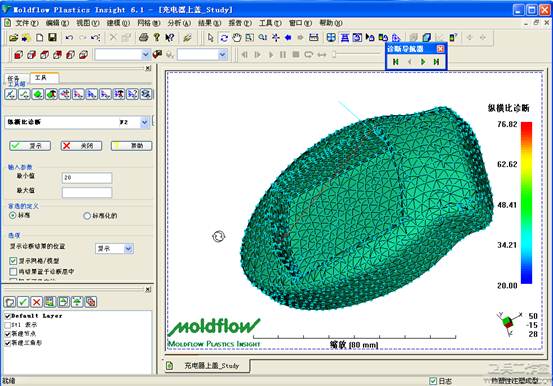
 3、网格诊断 【网格】|【网格诊断】
3、网格诊断 【网格】|【网格诊断】
4、网格修补
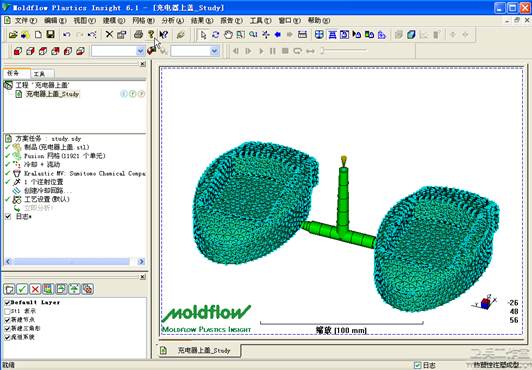
 5、创建浇注系统
5、创建浇注系统
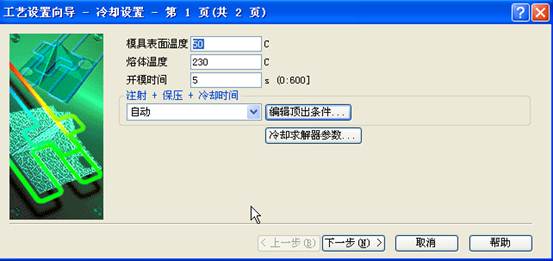
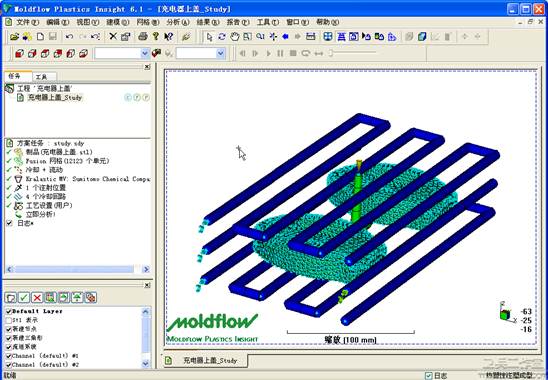
6:冷却系统的创建 【建模】|【冷却系统向导】,设置“使用的水管直径”、“所需要创建的水管与产品之间的距离”、“水管的条数”、“水管的间距”、“超出产品边界的距离”后【完成】;
7、分析次序的选择

8、成型工艺的参数设定
 9、结果
9、结果
 五、实验总结:
五、实验总结:
通过对Moldflow课程得学习,让我对采用Moldflow plastic Insight 6.0软件分析的基本流程有了一定了解;,使我逐步掌握了网格工具和网格诊断工具在处理缺陷网格时的基本方法;此外,通过流动、冷却、翘曲等的分析结果,让我进一步加深了对浇注系统分析的重要性的认知:只有充分分析制件的填充行为是否合理,填充是否平衡、完全等,才能获得最佳浇注系统得设计,得到最优浇口位置、浇口数目和布局;再者,通过流动分析不断改进才能获得最佳保压阶段的设置,从而尽可能地降低由保压引起的制品收缩、翘曲等质量问题;进而通过冷却分析结果判断制件冷却效果的优劣,根据冷却效果得到冷却时间的长短,确定成型周期所用时间;只有在获得均匀冷却的基础上优化冷却管道布局,尽量缩短冷却时间缩短单个制品的成型周期,才能提高生产率,降低生产成本。另外就是Wrap分析,它可以判定热塑性材料成型的制件是否会出现翘曲,并查处导致翘曲产生的原因,进而也对提高产品质量,减少废品率,提高企业综合竞争实力有很大的作用。 虽然通过对课程的系统学习和综合实验分析,让我们对Moldflow plastic Insight 6.0软件有了一个大体的认识,也掌握了基本参数的设置,但是作为即将踏入社会走向工作岗位的应届毕业生,仅仅会这些还是不够的;我们需要的是进一步了解各个参数设置的目的和作用,综合运用,以获得更加合理的注塑工艺。
实验四:快速成型
一、实验目的:
1、熟悉AFS-3000型激光快速成型机控制面板。
2、熟悉粉末激光快速成型件的制作过程。
3、熟悉快速成型件的后处理工艺。
4、理解快速成型在生产中的应用
二、实验地点及时间
时间:第十七周周三 地点:东区六教104
 三、实验机器:AFS-3000型激光快速成型机 1台
三、实验机器:AFS-3000型激光快速成型机 1台
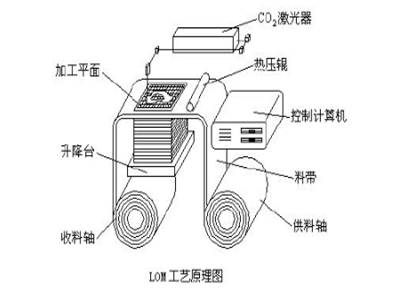
四、实验原理:
激光快速成型技术的原理是用CAD生成的三维实体模型,通过分层软件分层、每个薄层断面的二维数据用于驱动控制激光光束,扫射液体、粉末或薄片材料,加工出要求形状的薄层,逐层积累形成实体模型。
快速成型所成的实物如图:

五、快速成型特点:
由于快速成型技术(包含激光快速成型技术)仅仅在需要增加材料的地方增加材料,所以从设计到自动化,从知识获取到计算机处理,从计划到接口、通讯等方面来看,非常适合于CIM、CAD及CAM,因此,同传统的制造方法相比较,激光快速成型显示出诸多的优)点: (1)制造速度快、成本低、节省时间和节约成本,为传统制造方法注入新的活力,而且可实现自由制造,产品制造过程以及产品造价几乎与产品的批量和复杂性无关。 (2)采用非接触加工的方式,没有传统加工的残余应力的问题,没有工具更换和磨损之类的问题,无切割、噪音和振动等,有利于环保。 (3)可实现快速铸造、快速模具制造,特别适合于新产品开发和单间零件生产。
六、快速成型技术未来的发展:
激光快速成型技术正在发生巨大的变化 ,主要体现在新技术、 新工艺及信息网络化等方面 ,其未来发展方向包括:
(1) 研究新的成型工艺方法 ,在现有的基础上 ,拓宽激光快速成型技术的应用 ,开展新的成型工艺的探索。
(2) 开发新设备和开发新材料。
LRP 设备研制向两个方向发展:自动化的桌面小型系统 ,主要用于原型制造;工业化大型系统 ,用于制造高精度、 高性能零件。 成型材料的研发及应用是目前LRP技术的研究重点之一。 发展全新材料 ,特别是复合材料 ,如纳米材料、 非均质材料、 功能材料是当前的研究热点。激光快速成型技术是多学科交叉融合一体化的技术系统 ,正在不断研究开发和推广应用中 ,与生物科学交叉的生物制造、 与信息科学交叉的远程制造、 与纳米科学交叉的微机电系统等为它集成制造提供了广阔的发展空间。 随着科学技术和现代工业的发展 ,它对制造业的作用日益重要并趋向更高的综合。
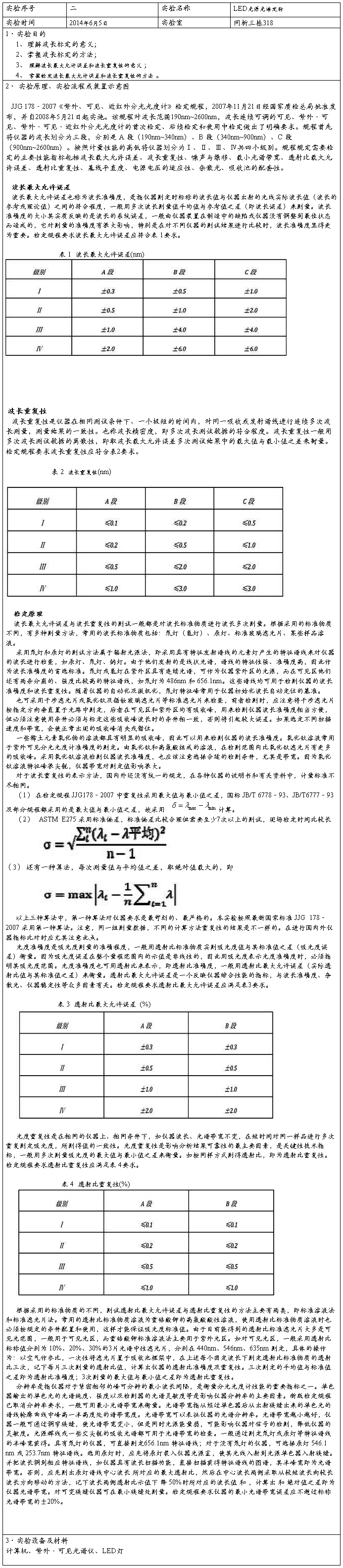
第二篇:实验二:LED光源光谱定标,LED光谱测量实验报告
本科学生综合性实验报告
学号 114090523 姓名 罗朝斌
学院 物电学院 专业、班级 11光电子
实验课程名称 光谱技术及应用实验
教师及职称 罗永道 副教授
开课学期 2013 至 2014 学年 下 学期
填报时间 2014 年 6 月 10 日
云南师范大学教务处编印
一.实验设计方案
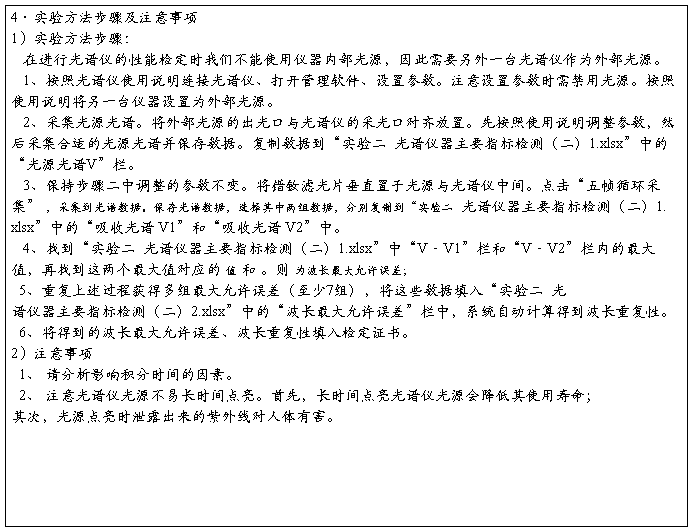
二.实验报告
