20xx年全国大学生电子设计竞赛
题目:简易旋转倒立摆及控制装置(C题)
参赛学校:江苏师范大学
队伍编号:XZ 015
参赛队员:徐xx、刘xx、黄x
指导教师:朱xx 、王xx
2013年9月7日
目录
摘要.................................................................1
Abstract.............................................................1
1方案论证与比较......................................................2
1.1电机类型的论证与选择............................................2
1.2单片机的论证与选择..............................................2
1.3电机驱动电路的论证与选择........................................2
1.4角度传感器的论证与选择..........................................3
2系统实现方框图和电路设计............................................4
2.1系统总体框架图和实物构架图......................................4
2.2硬件电路设计....................................................5
2.2.1电位器电路...................................................5
2.2.2显示模块的电路...............................................5
2.2.3电机驱动电路.................................................6
3系统软件设计........................................................7
3.1精密电位器误差计算..............................................7
3.2倒立摆控制策略..................................................7
3.3系统流程图......................................................9
4测试方案与测试结果.................................................10
4.1测试仪器.......................................................10
4.2测试结果.......................................................10
4.3测试结果分析...................................................11
参考文献............................................................12
摘 要
本文以STC12C5A60S2单片机为控制核心,通过角度传感器实时检测出倒立摆的位置并由单片机计算,计算PID控制算法,实现对直流电机转速的控制,达到倒立摆的动态平衡。同时系统可以通过键盘设定运行模式和相关角度值,倒立摆运行角度和运行时间由液晶显示,具有较好人机界面。系统设计结构简单,制作成本低,控制精度高。
关键字:STC12C5A60S2 倒立摆 PID
Abstract
This paper takes STC12C5A60S2 single chip as the control core,Through the real-time detection of the inverted pendulum's position and angle sensor is composed of a single chip computer calculation,Calculation of PID control algorithm,Control the speed of the DC motor,To achieve the dynamic balance of the inverted pendulum.At the same time the system can be set through the keyboard operation mode and related angle values.Inverted pendulum movement angle and running time by the liquid crystal display,With good man-machine interface.The system has the advantages of simple structure design,Low production cost,High control precision.
Keyword: STC12C5A60S2 level inverted pendulum PID
1 方案论证与比较
1.1电机类型的论证与选择
方案一:采用步进电机。步进电机具有动态响应快、易于起停,易于正反转及变速的优点。但缺点是它以步进式跟进,角度小于一个步距角时是系统响应盲区,而且经过测试步进电机在控制旋转臂时,抖动性大并且容易出现卡顿现象,所以不适合单摆的控制。
方案二:采用直流减速电机。扭矩大,体积小,驱动电路简单,稳定强,负载能力强等优点。
综合比较以上两种电机,结合设计所需平稳的控制摆杆处于竖直状态,故选择直流减速电机。
1.2单片机的论证与选择
方案一:采用AT89C52单片机。AT89C52单片机是一种低功耗、高性能CMOS 8位微控制器,具有8K在系统可编程Flash存储器。
方案二:采用STC89C52单片机。STC系列单片机具有低功耗、高速度、超强抗干扰等优点,具有32K可编程Flash存储器。
方案三:采用STC12C5A60S2单片机本身带有有8路十位AD转换和2路PWM,而且处理速度比一般单片机要快,精度高。
综合比较以上三种单片机。为了更方便、高精度、高速度地控制系统,完成题目要求,故选择STC12C5A60S2单片机为主控芯片。
1.3电机驱动电路的论证与选择
方案一:使用L298N芯片。L298N是一种高电压、大电流电机驱动芯片,最高工作电压可达46V,峰值电流可达3A,持续工作电流为2A。可以通过I/O口提供信号方便地控制直流电机或步进电机,但是容易发烫。
方案二:使用BTS7960芯片。BTS7960芯片是集成的大电流半桥驱动,其内部包含一片NMOS、一片PMOS和一片半桥门集驱动。其输入信号为标准的TTL电平,直接与单片机相连就可以,降低系统的不稳定因素,而且可以用PWM调速。
综合比较以上两种驱动芯片,由于电路要求精度高、稳定性好,能满足速度变换要求,故选择BTS7960芯片为驱动芯片。
1.4角度传感器的论证与选择
方案一:采用凌阳公司的MXD2020EL传感器。在正常工作下,传感器讲测到的倾角直接转换为占空比不同的频率输出。
方案二:采用SCA60C传感器。该传感器抗干扰能力强,功耗低,输入信号为0.5V至4.5V的模拟电压。
方案三:采用精密可调电位器,采集其可调端随摆杆摆动时输出的电压,经过A/D模数转换变成数字信号后,再将信号交给单片机处理,计算出摆杆偏离中心垂线的度数,切易于固定。
综合比较以上三种传感器,MXD2020EL和SCA60C传感器都相对容易控制和计算,但它们的测量精度不够高,反应速度不够快,无法满足设计的需求,最重要是它们不容易固定在旋转臂上,故选择用电位器采集模拟信号再转换成数字信号测量的方法。
2系统实现方框图和电路设计
2.1系统总体框架图和实物构造图
整个系统主要划分为以下七个模块:控制器模块、电机驱动模块、摆杆角度测量模块、转轴角度测量模块、键盘输入模块、液晶显示模块、电源模块。系统总体框架如图1所示,整体构造图如图2所示。
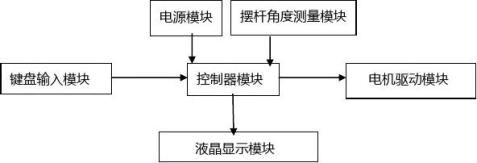
图 1 总体框架图
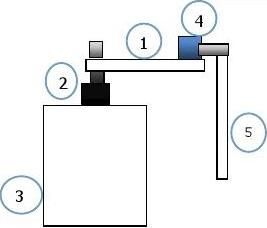
图2 整体构造图
图2中:1为铝制摆杆;2为直流减速电机;3为支架;4为精密电位器;5为摆杆。
2.2硬件电路设计
2.2.1电位器电路
在本控制系统中采用精密导电塑料电位器WDD35-1,它是一种电阻电位器,它的电性能决定了电位器的主要电性能。电阻体应有良好的阻值稳定性,较小的电阻温度系数和静噪声为了提高可靠性,它还应具有耐潮、耐热、耐磨、耐氧化、耐高负荷以及耐冷热骤变等性能。其实物图如图3所示。
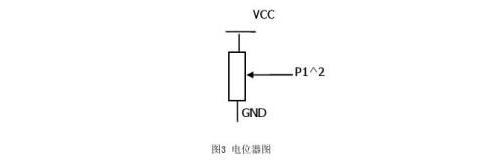
图3 电位器图
2.2.2显示模块的选择与设计
倒立摆在运动过程中,要求显示摆角大小以及相关的时间参数,所以用RT1602液晶显示模块。字符型液晶显示模块是一种专门用于显示字母、数字、符号等点阵式LCD。液晶显示模块采用下图 图4连接方式。
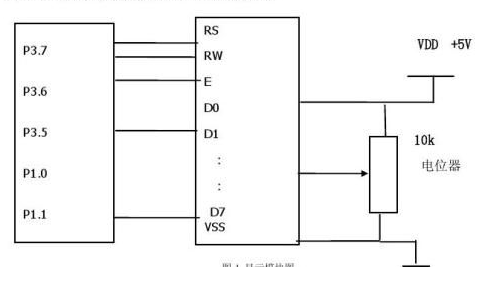
图4 显示模块图
2.2.3电机驱动电路

图5电机驱动电路图
图5中通过 PWM1和PWM2 进行调速和左右转动。
3系统的软件设计
3.1精密电位器误差计算
根据题目要求:杆能在 60 秒钟内出现杆处于水平面以上状态,并显示到达水平面以上 的时间。将摆直立在 180 度处,然后使其自由摆动,以最快的速度控制摆停留在平衡状态, 显示达到平衡位置的时间。故需对摆处于最低点位置
(0° )和摆处于最高点位置(180°)反 复检测,因此应该尽可能将精密电位器比较连续的位置固定在 0°和 180°位置。
摆棍处于最低端视 ad 采样值为 120,处于最上端时 ad 采样值为 671,其与角
度转换关系为公式(1)
 (1)
(1)
精密电位器的基准电压为 2.5v,AVR 单片机使用内部的基准电压为 2.56v,ad 转换的范 围为0-1024,经计算全压时 ad 转换结果为 1000;而我们用上公式计算 360 度时 ad 值为 1102。 需要计算的角度范围为-5 度到 5 度和 165 度到 195 度,经计算为 104 到 136 和 625 到 717。
3.2倒立摆控制策略
针对本系统中角度传感器采样较慢,控制对象伺服电机滑动模块惯性大、滞后大的特点, 我们选用了位置式按角度偏差的比例、积分、微分进行控制,即增量式数字 PID 控制。数字 PID 控制算法是以模拟 PID 调节器控制为基础的,由于单片机是一种采样控制, 它只能根据采样时刻的偏差计算控制量。但是如果采样周期 T 取得足够小,采用数值计算 的方法逼近可相当准确,被控过程与连续控制十分接近。离散化后的PID 算式为公式(2)
 (2)
(2)
(2)式中:
K : 比例系数
 : 偏差为零时的控制作用
: 偏差为零时的控制作用
 : 积分时间
: 积分时间
 : 微分时间
: 微分时间
T : 采样时间
以上公式称为位置式算法。由它可推出增量式算法公式(3)
 (3)
(3)
在本设计中采用了增量式算法,这是由于增量式算法只需保持以前三个时刻的偏差即 可,既节省了资源又不会产生较大的积累误差。式中各系数由反复实践后确定,实验证明,这种控制方式可以加快系统阶跃响应、减小超调量,并具有较高的精度。
3.3 系统整体流程图
本系统采用按键执行命令,每个按键执行一项要求。

图5整体流程图
4 测试方案与测试结果
4.1 测试仪器
自制倒立摆装置:直流减速电机、旋转臂(长40cm)、摆杆(长19cm,横截面0.9cm*0.9cm)、精密电位器、量角器。
4.2 测试结果
摆杆从自然下垂状态开始,驱动电机带动旋转臂往复旋转使摆杆摆动,由测量角度测定摆杆的角度值,测量结果如表1:
表1
|
测试次数 |
测试一 |
测试二 |
测试三 |
测试四 |
测试五 |
|
摆角最大值 |
70 |
-77 |
69 |
-72 |
81 |
摆杆从下垂状态开始,增大摆杆摆角幅度,使摆杆尽快做圆周运动,摆杆从摆动至做完一个圆周运动所用时间如表2:
表2
|
测试次数 |
测试一 |
测试二 |
测试三 |
测试四 |
测试五 |
|
时间/s |
2.3 |
3.1 |
3.5 |
2.9 |
3.7 |
在摆杆处于自然下垂状态下,外力拉起摆杆至接近 165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于 5s;期间旋转臂的转动角度不大于 90°,实际测试摆杆倒立时间如表3。
表3
|
测试次数 |
测试一 |
测试二 |
测试三 |
测试四 |
测试五 |
|
倒立时间 |
5.3s |
5.7s |
6.1s |
5.6s |
5.9s |
4.3测试结果分析
系统总体上达到较好的性能。倒立摆能够实现动态倒立,且运行的时间 误差在允许范围内。倒立摆运行性能较好,制作成本低,性价比较高。倒立摆控制的误差主 要来源于直流伺服电机、角度传感器和倒立摆机械结构。直流伺服电机在低速运动时,控制 存在死区,低脉宽时电机不运动。角度传感器由精密电位器改制,存在角度死区,精度不足。导轨硬度不够,滑动模块长时间滑动造成导轨下弯,滑动模块在运动中摩擦力不均匀。因此, 采用具有更好启动、制动和调速特性直流电机、精度更高的角度传感器改进硬件结构,以消除控制误差,使控制精度更高。
参考文献
[1] 涂植英,陈今润.自动控制原理.重庆:重庆大学出版社,2005
[2] 程华英,童诗白. 模拟电子技术基础.北京.高等教育出版社
[3] 姚金生 郑小利 等编著 元器件 电子工业出版社,2004 年 10 月第 1版[M]
[4] 张德江.计算机控制系统. 北京.机械工业出版社
[5] 胡寿松.自动控制原理.北京:科学出版社,2001
[6] 滕青芳,范多旺,董海鹰,路小娟.自动控制原理.北京:人民邮电出版社,2008.210-230
第二篇:20xx年全国电子设计大赛题目简易旋转倒立摆及控制装置(C题 )
20xx 年全国大学生电子设计竞赛试题
参赛注意事项
(1)9 月4 日8:00 竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)9 月7 日20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。

简易旋转倒立摆及控制装置(C 题)
【本科组】
一、任务
设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图1 所示。电动机A 固定在支架B 上,通过转轴F 驱动旋转臂C 旋转。摆杆E 通过转轴D 固定在旋转臂C 的一端,当旋转臂C 在电动机A 驱动下作往复旋转运动时,带动摆杆E 在垂直于旋转臂C 的平面作自由旋转。
二、要求
图1 旋转倒立摆结构示意图
1.基本要求
(1)摆杆从处于自然下垂状态(摆角0°)开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°;
(2)从摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;
(3)在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间旋转臂的转动角度不大于90°。
2.发挥部分
(1)从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立状态时间不少于10s;
(2)在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s 内恢复倒立状态;
(3)在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°;
(4)其他。三、说明
1.旋转倒立摆机械部分必须自制,结构要求如下:硬质摆杆E 通过转轴D 连接在旋转臂C 边缘,且距旋转臂C 轴心距离为20cm±5cm;摆杆的横截面为圆形或正方形,直径或边长不超过 1cm,长度在15cm±5cm 范围内;允许使用传感器检测摆杆的状态,但不得影响摆杆的转动灵活性;图1 中支架B 的形状仅作参考,其余未作规定的可自行设计结构;电动机自行选型。
2.摆杆要能够在垂直平面灵活旋转,检验方法如下:将摆杆拉起至水平位置后松开,摆杆至少能够自由摆动3 个来回。
3.除电动机A 之外,装置中不得有其他动力部件。
4.摆杆自然下垂状态是指摆角为
0°位置,见图2。
5.摆杆倒立状态是指摆杆在-165° 至165°范围内。
6.基本要求(1)、(2)中,超过30s 视为失败;发挥部分(1)超过90s 视为失败;发挥部分(3)超过3 分钟即视为失败;以上各项,完
成时间越短越好。
图2.摆杆位置示意图 7.摆杆倒立时施加干扰的方法是,以15cm 长细绳栓一只5 克砝码,在摆杆上方将砝码拉起15°~45°,释放后用砝码沿摆杆摆动的切线方向撞击摆杆上端1~2cm 处;以抗扰动能力强弱判定成绩。
8.测试时,将在摆杆后1~2cm 处固定一如图2 所示轻质量角器,以方便观察摆杆的旋转角度。
四、评分标准
|
设计报告 |
项目 |
主要内容 |
分数 |
|
系统方案 |
系统结构、方案比较与选择 |
4 |
|
|
理论分析与计算 |
电动机选型、摆杆状态检测,驱动与控制算法 |
6 |
|
|
电路与程序设计 |
电路设计程序结构与设计 |
5 |
|
|
测试方案与测试 结果 |
测试结果及分析 |
3 |
|
|
设计报告结构及 规范性 |
摘要设计报告正文的结构公式、图表的规范性 |
2 |
|
|
总分 |
20 |
||
|
基本要求 |
完成(1) |
15 |
|
|
完成(2) |
15 |
||
|
完成(3) |
20 |
||
|
总分 |
50 |
||
|
发挥部分 |
完成(1) |
20 |
|
|
完成(2) |
10 |
||
|
完成(3) |
15 |
||
|
完成(4) |
5 |
||
|
总分 |
50 |
||